1П Ј ft fT tf jSe. min.
, ф ф 1 1 Ф X v
| название | год | авторы | номер документа |
|---|---|---|---|
| Предохранительное устройство для троса | 1988 |
|
SU1676919A1 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2010 |
|
RU2487374C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2013 |
|
RU2570428C2 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| Судовое подъемно-опускное устройство для буксируемого подводного аппарата | 1982 |
|
SU1096162A1 |
| БУКСИРУЕМАЯ ЛИНИЯ | 2007 |
|
RU2361773C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| Устройство для буксировки сейсмографной косы в морях с ледовым покровом | 1990 |
|
SU1744660A1 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА С ИСПОЛЬЗОВАНИЕМ БУКСИРУЕМЫХ КОМПОНЕНТОВ, НАХОДЯЩИХСЯ НИЖЕ ПОВЕРХНОСТИ ВОДЫ | 2015 |
|
RU2672044C2 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
Изобретение относится к устройствам, обеспечивающим управление при буксировке транспортных средств, в частности в судовождении. Цель изобретения - повышение надежности буксировки. Система управления включает в себя лебедку 2, установленную на буксирующем судне 1 и связанную посредством троса 4 с буксируемым судном 3. Система содержит также элементы автоматического регулирования, фиксирующие силу натяжения троса, скорость судов, параметры двигательно-движи- тельной установки буксирующего судна и т.п. Эти элементы представляют собой датчики, задатчики, регуляторы указанных параметров, а также идентификаторы и функциональный преобразователь. Наличие указанных элементов и их связи автоматически поддерживают процесс буксировки с обеспечением достаточной надежности при различных эксплуатационных условиях. 2 з.п. ф-лы, 11 ил.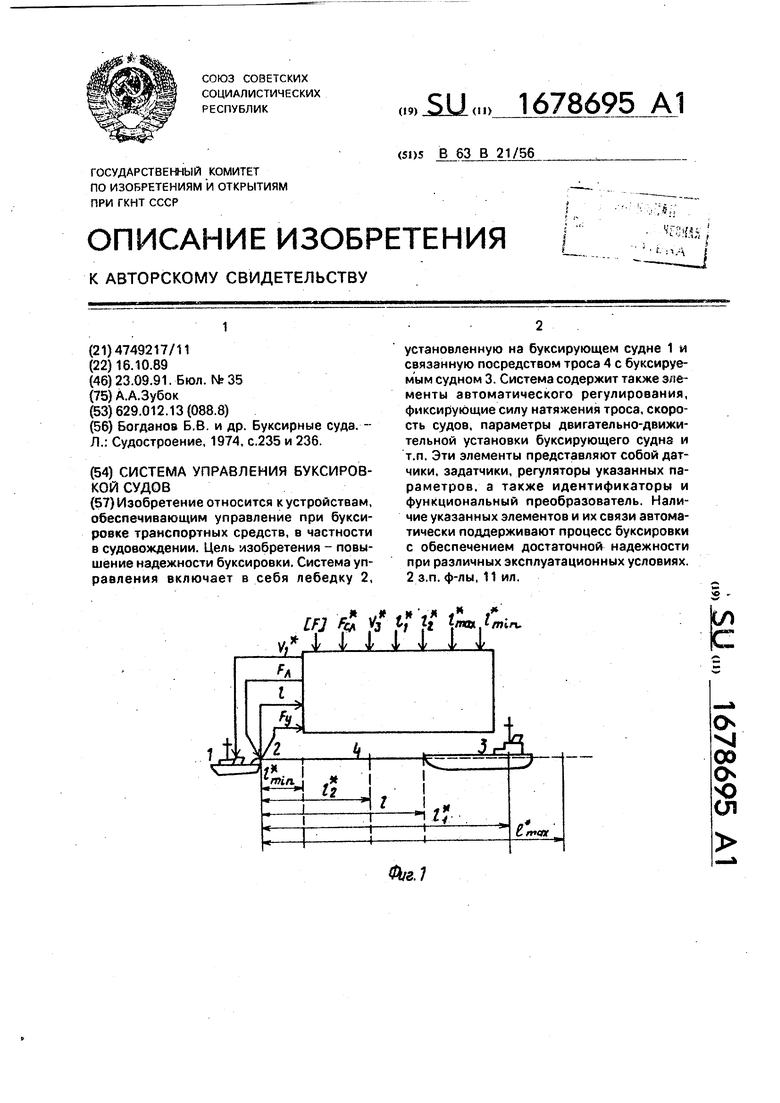
О VI 00
о
1°
ел
Изобретение относится к устройствам, обеспечивающим управление при буксировке транспортных средств, в частности, в судовождении.
Цель изобретения - повышение надеж- ности буксировки,
На фиг.1 показано схематично управление буксировкой; на фиг. 2 - блок-схема устройства управления буксировкой; на фиг.З - регулятор на базе операционного усилителя; на фиг.4 - блок-схема идентификатора; на фиг.5 - принципиальная схема идентификато- pa; на фиг.6 - идентификатор, вариант выполнения; на фиг.7 - блок-схема фун- кционального преобразователя; на фиг.8 - принципиальная схема преобразователя; на фиг.9 - блок-схема преобразователя, вариант выполнения; на фиг.10 - принципиальная схема этого преобразователя; на фиг.11 - идентификатор, второй вариант выполнения.
Система содержит буксирующее судно 1 с установленной на нем лебедкой 2, связанной с буксируемым судном 3 буксирным тросом 4. Управляют устройством, задавая исходные данные для режима буксировки - максимально допустимое усилие F натяжения буксирного троса 4, усилие F Сл натяжения троса 4 при выборе слабины, скорость V з движения буксируемого судна 3, определены И, z и Imax, Imin соответственно рабочей и допустимой длин вытравленного троса 4. Устройство анализирует обратные связи по усилию Fy натяжения троса 4, длине I вытравленного лебедкой 2 троса 4 и формирует сигналы Vi. Рл управления скоростью Vi буксирующего судна 1 и тягой Рл буксирной лебедки 2. При этом, чтобы обеспечить мягкий вы- бор слабины троса 4 и демпфирование колебаний натяжения троса 4, в том числе и при буксировке на волнении, сигнал управления Fn лебедкой 2 формируют по закону, например:
- ел
Р - JJLL+ рс 4 IF.I-R,. у
г л2 о
е -
Il-I0ln . ,
И -12
)slgn(-l0), (1)
где
либо по какому-то другому целесообразному закону, например линейному на рабочем участке;
Ffl Рсл + ( F - Рсл ) -Ј-
И -12 KWh & ) J « при if I Ј I ;
H l2
0 5 0
5 0 5 0 5
0
5
Рл Fcn при I 12;
при I I .
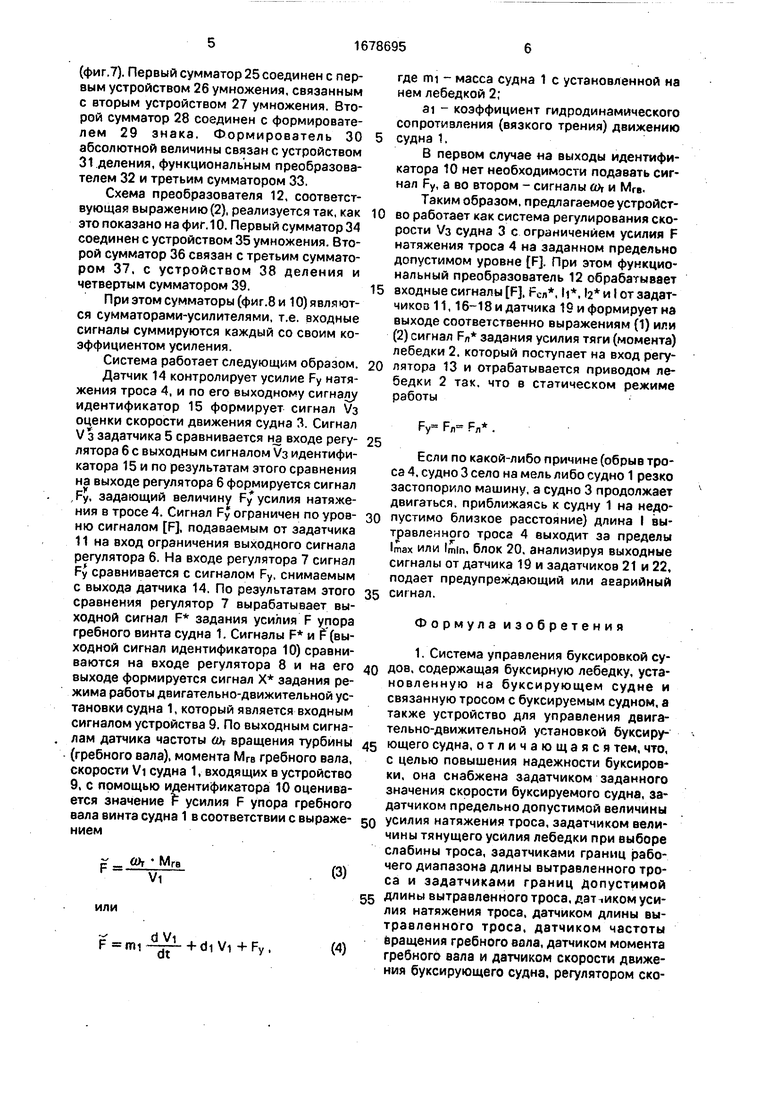
Система управления содержит последовательно соединенные задатчик 5 заданного значения Уз скорости буксируемого судна, регулятор 6 скорости Уз судна 3, регулятор 7 усилия Fy натяжения буксируемого троса 4, регулятор 8 усилия F упора гребного винта судна 1, устройство 9 управления двигательно-движительной установкой судна 1, первый идентификатор 10 и второй вход регулятора 8, последовательно соединенные задатчик 11 предельно допустимой величины F усилия натяжения троса 4, функциональный преобразователь 12 задания величины Рл заданного значения тянущего усилия Рл лебедки 2 (момента на барабане лебедки 2), регулятр 13 тянущего усилия (момента Ffl лебедки 2, последовательно соединенные датчик 14 усилия Fy натяжения троса 4, второй идентификатор 15 и третий вход регулятора 6, задатчики 16 величины тянущего усилия (момента) FC/I лебедки 2 при выборе слабины троса 4, задат- чики 17 и 18 границ и 2 рабочего диапазона длины вытравленного троса 4 и датчик 19 длины вытравленного троса 4, выходы которых соединены с соответствующими входами преобразователя 12, блок 20 сигнализации, первый вход которого соединен с выходом датчика 19, задатчики 21 и 22 границ Imin и Imax допустимой длины вытравленного троса 4, выходы которых соединены соответственно с вторым и третьим входами блока 20, второй и третий входы идентификатора 10 соответственно соединены с вторым и третьим выходами устройства 9, а четвертый его вход - с выходом датчика 14, выход задатчика 11 соединен с вторым входом регулятора 6, выход датчика 14 соединен с вторым входом регулятора 7, причем первым выходом устройства 9 является выход датчика частоты вращения гребного вала, вторым - выход датчика момента гребного вала, третьим - выход датчика скорости Vi движения судна 1.
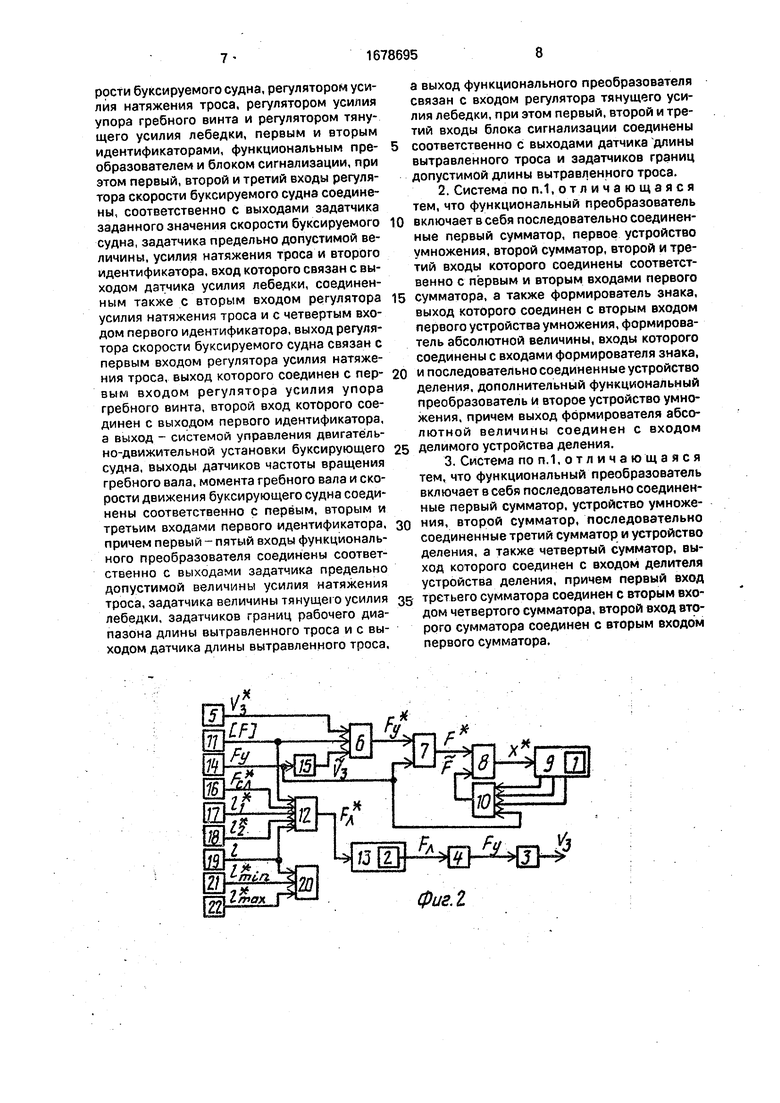
Идентификатор 10 (фиг.4-6) на базе операционных усилителей имеет устройство 23 умножения и устройство 24 деления.
Функциональный преобразователь 12, соответствующий выражению (1), может быть реализован на базе тех же усилителей
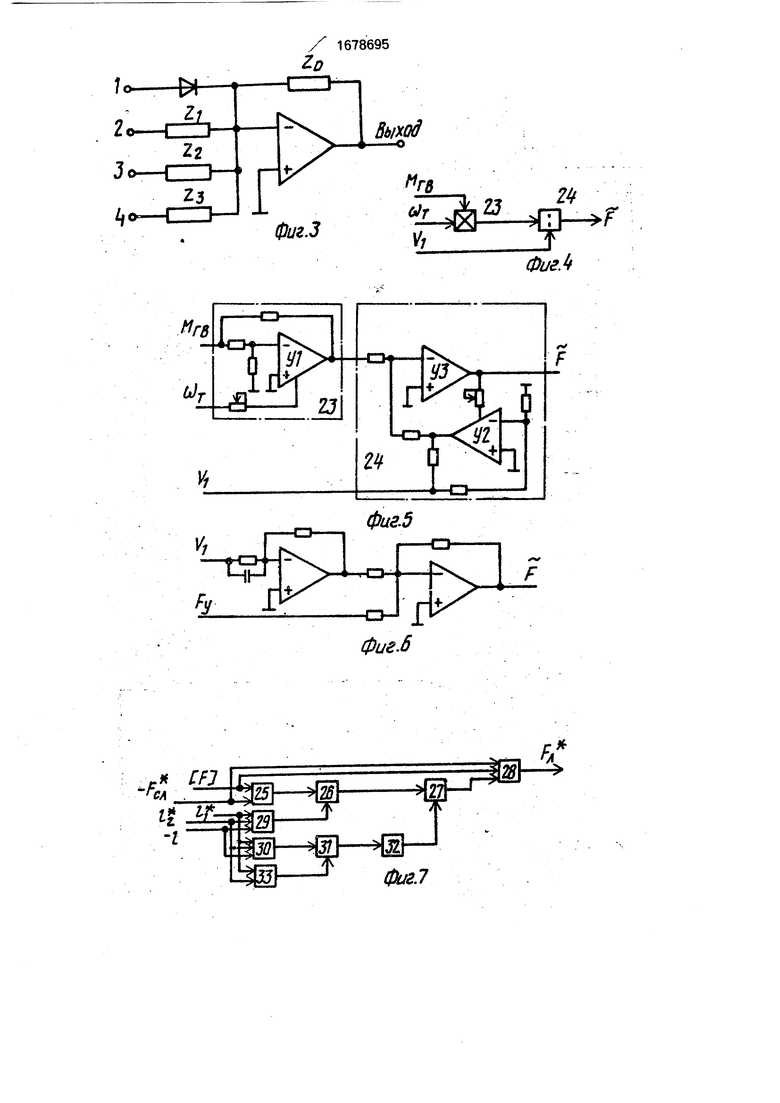
(фиг,7). Первый сумматор 25 соединен с первым устройством 26 умножения, связанным с вторым устройством 27 умножения. Второй сумматор 28 соединен с формирователем 29 знака. Формирователь 30 абсолютной величины связан с устройством 31 деления, функциональным преобразователем 32 и третьим сумматором 33.
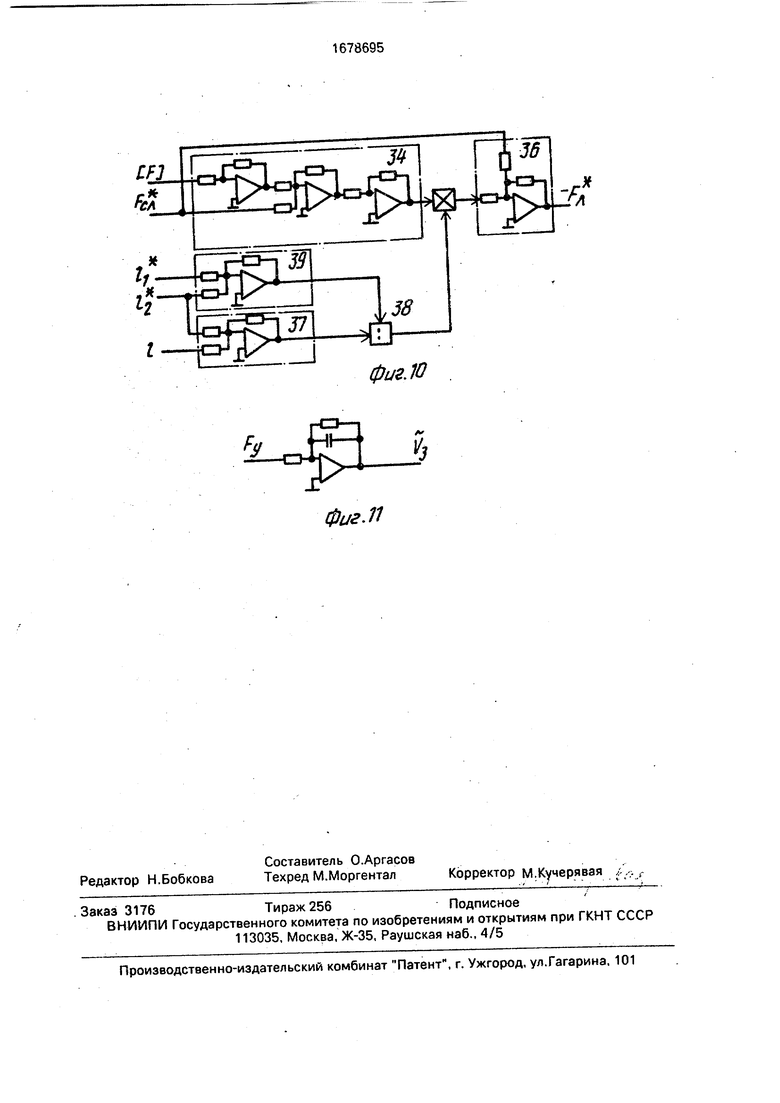
Схема преобразователя 12, соответствующая выражению (2), реализуется так, как это показано на фиг. 10. Первый сумматор 34 соединен с устройством 35 умножения. Второй сумматор 36 связан с третьим сумматором 37, с устройством 38 деления и четвертым сумматором 39.
При этом сумматоры (фиг.8 и 10) являются сумматорами-усилителями, т.е. входные сигналы суммируются каждый со своим коэффициентом усиления.
Система работает следующим образом.
Датчик 14 контролирует усилие Fy натяжения троса 4, и по его выходному сигналу идентификатор 15 формирует сигнал Уз оценки скорости движения судна 3. Сигнал V з задатчика 5 сравнивается на входе регулятора 6 с выходным сигналом Vs идентификатора 15 и по результатам этого сравнения на выходе регулятора 6 формируется сигнал Fy, задающий величину Fy усилия натяжения в тросе 4. Сигнал Fy ограничен по уровню сигналом F, подаваемым от задатчика 11 на вход ограничения выходного сигнала регулятора 6. На входе регулятора 7 сигнал Fy сравнивается с сигналом Fy, снимаемым с выхода датчика 14. По результатам этого сравнения регулятор 7 вырабатывает выходной сигнал F задания усилия F упора гребного винта судна 1. Сигналы F и F (выходной сигнал идентификатора 10) сравниваются на входе регулятора 8 и на его выходе формируется сигнал X задания режима работы двигательно-движительной установки судна 1, который является входным сигналом устройства 9. По выходным сигналам датчика частоты ин вращения турбины (гребного вала), момента МГв гребного вала, скорости Vi судна 1, входящих в устройство 9, с помощью идентификатора 10 оценивается значение F усилия F упора гребного вала винта судна 1 в соответствии с выражением
С -иди
Мга Vi
(3)
или
F mi Ј-+diVi+Fy.
(4)
где mi - масса судна 1 с установленной на нем лебедкой 2;
ai - коэффициент гидродинамического сопротиаления (вязкого трения) движению
судна 1.
В первом случае на выходы идентификатора 10 нет необходимости подавать сигнал Fy, а во втором - сигналы он и МГв. Таким образом, предлагаемоеустройство работает как система регулирования скорости Vs судна 3 с ограничением усилия F натяжения троса 4 на заданном предельно допустимом уровне F. При этом функциональный преобразователь 12 обрабатывает
входные сигналы F. Fcn, И. I отзадат- чиков 11,16-18и датчика 19 иформируетна выходе соответственно выражениям (1) или (2) сигнал F/т задания усилия тяги (момента) лебедки 2. который поступает на вход регулятора 13 и отрабатывается приводом лебедки 2 так. что в статическом режиме работы
Fy Fn
Рл
Если по какой-либо причине (обрыв троса 4, судно 3 село на мель либо судно 1 резко застопорило машину, а судно 3 продолжает двигаться, приближаясь к судну 1 на недопустимо близкое расстояние) длина I вытравленного троса 4 выходит за пределы Imax или Imin, блок 20, анализируя выходные сигналы от датчика 19 и задатчиков 21 и 22, подает предупреждающий или аварийный
сигнал.
Формула изобретения
усилия натяжения троса, задатчиком величины тянущего усилия лебедки при выборе слабины троса, задатчиками границ рабочего диапазона длины вытравленного троса и эадатчиками границ допустимой
длины вытравленного троса, дат IHKOM усилия натяжения троса, датчиком длины вытравленного троса, датчиком частоты вращения гребного вала, датчиком момента гребного вала и датчиком скорости движения буксирующего судна, регулятором скорости буксируемого судна, регулятором усилия натяжения троса, регулятором усилия упора гребного винта и регулятором тянущего усилия лебедки, первым и вторым идентификаторами, функциональным пре- образователен и блоком сигнализации, при этом первый, второй и третий входы регулятора скорости буксируемого судна соединены, соответственно с выходами задатчика заданного значения скорости буксируемого судна, задатчика предельно допустимой величины, усилия натяжения троса и второго идентификатора, вход которого связан с выходом датчика усилия лебедки, соединенным также с вторым входом регулятора усилия натяжения троса и с четвертым входом первого идентификатора, выход регулятора скорости буксируемого судна связан с первым входом регулятора усилия натяжения троса, выход которого соединен с пер- вым входом регулятора усилия упора гребного винта, второй вход которого соединен с выходом первого идентификатора, а выход - системой управления двигатель- но-движительной установки буксирующего судна, выходы датчиков частоты вращения гребного вала, момента гребного вала и скорости движения буксирующего судна соединены соответственно с первым, вторым и третьим входами первого идентификатора, причем первый - пятый входы функционального преобразователя соединены соответственно с выходами задатчика предельно допустимой величины усилия натяжения троса, задатчика величины тянуще о усилия лебедки, задатчиков границ рабочего диапазона длины вытравленного троса и с выходом датчика длины вытравленного троса,
12/рдх Г
а выход функционального преобразователя связан с входом регулятора тянущего усилия лебедки, при этом первый, второй и третий входы блока сигнализации соединены соответственно с выходами датчика длины вытравленного троса и задатчиков границ допустимой длины вытравленного троса.
фиг,1
-Б
Jj
ммот
22
ИШНММ
zl
to
1678695
г
Вы
фиг.З
Выход
о
Нгб
23
24
Vj
ФигЛ
фиг.б
фиг.7
фие.8
W
FA
фиг .11
фиг.Ю
| Богданов Б.В | |||
| и др | |||
| Буксирные суда | |||
| - Л.: Судостроение, 1974, с.235 и 236. |
