Изобретение относится к горной промышленности и может быть использовано для управления- рабочим оборудованием экскаваторов-драглайнов.
Цель изобретения - повышение надежности и долговечности рабочего оборудования и механизмов экскаватора-драглайна за счет устранения аварийного режима срыва ковша с бровки забоя.
На чертеже представлена блок-схема предлагаемого устройства.
Устройство для управления движением ковша драглайна включает рабочее оборудование в виде ковша 1 с подъемными 2 и тяговыми 3 канатами, подъемную лебедку 4 с двигателем 5 и тяговую лебедку б с двигателем 7, которые управляются бдо- ком 8 регулирования скорости подъемной лебедки и блоком 9 регулирования скорости тяговой лебедки сигналами, поступа- юш,ими с выхода блока 10 выделения сигнала управления приводом подъема и с выхода блока 11 выделения сигнала управления приводом тяги. На входы блока 10 выделения сигнала управления приводом подъема поступают сигналы с выходов задатчика 12 скорости подъемной лебедки и регулятора 13 натяжения подъемных канатов входы которого соединены с выходами задатчика 14 и датчика 15 натяжения подъемных канатов. На входы блока 11 выделения сигнала управления приводом тяги поступают сигналы с выходов задатчика 16 скорости тяговой лебедки и регулятора 17 натяжения тяговых канатов, входы которого соединены с выходами задатчика 18 и датчика 19 натяжения тяговых канатов. Входы компаратора 20 подключены к выходам задатчика 4 и датчика 15 натяжения подъемных канатов, а выход соединен с управляющими входами первого 21 и второго 22 управляемых ключей. Основной вход первого управляемого ключа 21 соединен с вь ходом блока 11 выделения сигнала управления приводом тяги, а выход - с входом блока 9 регулирования скорости тяговой лебедки.. Основной вход второго управляемого ключа 22 подключен к выходу задатчика 23 скорости привода поворота, а выход - к входу блока 24 регулирования скорости привода поворота.
Устройство работает следующим образом.
После опускания ковша 1 на поверхность забоя машинист управляет процессом копания путем изменения выходных сигналов задатчика 12 скорости подъемной лебедки и задатчика 16 скорости тяговой лебедки. На выходе задатчика 14 натяжения подъемных канатов устанавливается сигнал, соот- ветствуюш,ий заданному натяжению подъемных канатов, равному, например, весу упряжи ковша, при котором слабина в канатах отсутствует. Величина усилия в подъемных канатах измеряется датчиком 15 натяжения подъемных канатов. Выходные сигналы задатчика 14 и датчика 15 натяжения подъемных канатов поступают на входы компаратора 20. Если при посадке ковша на поверхность забоя в подъемных канатах 2 образовалась слабина, т. е. усилие в канатах меньше заданной величины, то выходной сигнал задатчика 14 становится больше выход,ного сигнала датчика 15 натяжения подъемных канатов. При этом сигп нал на выходе компаратора 20 равен нулю. При нулевом выходном сигнале компаратора 20, поступаюшем на управляюш,ие входы управляемых ключей 21 и 22, последние находятся в разомкнутом состоянии. В результате выходные сигнальЕ блока 11
5 выделения сигналов управления привода тяги и задатчика 23 скорости привода подъема, которые поступают соответственно на основные входы первого и второго управляемых ключей 21 и 22 и которые являются управляющими сигналами для электро0
приводов тяги и поворота, отключены от
входов блоков 9 и 24 регулирования скорости тяговой лебедки и привода поворота. Следовательно, при наличии слабины в подъемных канатах 2 ковш 1 не перемещается по
5 забою под действием тягового или поворотного механизмов, что исключает возможность срыва ковша с бровки забоя. При усилии в подъемных канатах 2, мень- шем заданного значения, установленного на задатчике 14 натяжения подъемных ка0 натов, выходной сигнал регулятора 13 натяжения подъемных канатов становится больше выходного сигнала задатчика 12 скорости подъемной лебедки. Блок 10 выделения сигнала управления приводом подъема, являющийся при копании блоком вы5 деления наибольшего сигнала,, подключает регулятор 13 натяжения подъемных канатов к входу блока 8 регулирования скорости подъемной лебедки. Под действием регулятора 13 происходит устранение слабины в подъемных канатах и установление заданной
величины их натяжения. Если машинист посредством воздействия на задатчик 12 скорости подъемной лебедки увеличивает натяжение подъемных канатов выше заданного значения, то выходной сигнал датчика 15 ста5 новится больше выходного сигна.та задатчика 14 натяжения подъемных канатов. При этом на выходе компаратора 20 появляется сигнал, поступающий на управляющие входы первого 21 и второго 22 управляемых ключей. Под действием этого сигнала первый 21 и
0 второй 22 управляемые ключи переходят в замкнутое состояние и выходные сигналы блока 11 выделения сигнала управления приводом тяги и задатчика 23 скорости привода поворота поступают на входы соответствующих блоков 9 и 24 регулирования
5 скорости тяговой лебедки и привода поворота. Воздействуя на задатчики скорости 12, 16 и 23 ГЕОдъемной, тяговой лебедок и привода поворота, машинист обеспечивает
перемещение ковша по забою и осуществляет управление электроприводами. На задатчике 18 натяжения тяговых канатов устанавливается сигнал, соответствующий, например, 80-90% от стопорной величины усилия в тяговых канатах. Если усилие в тяговых канатах, измеряемое датчиком 19 натяжения тяговых канатов, становится больще заданной величины, то выходной сигнал регулятора 17 натяжения тяговых канатов становится меньше, чем выходной сигнал задатчика 16 скорости тяговой лебедки. Блок II выделения сигнала управления приводом тяги, являющийся при копании блоком выделения наименьшего сигнала, подключает регулятор 17 натяжения тяговых канатов через первый управляемый ключ 21 на вход блока 9 регулирования скорости тяговой лебедки, в результате чего усилие в тяговых канатах устанавливается на заданном уровне.
Таким образом, предлагаемое устройство по сравнению с прототипом позволяет осуществить автоматическую блокировку управляющих сигналов приводов тяги и поворота при наличии слабины в подъемных канатах. Применение устройства позволяет устранить аварийный режим срыва ковша с бровки забоя, снизить динамические нагрузки рабочего оборудования драглайна, повысить его надежность и долговечность.
Формула изобретения
Устройство для управления движением ковша экскаватора-драглайна, содержащее задатчики скорости подъемной и тяговой лебедок, подключенные к входам блоков
выделения сигналов yiipaR.ieiiiiH ;:; /.v ;: n тягой лебедок соответствеин;..л;1ла r iiiiNJ натяжения подъемных и тяговых канатов, подключенные соответственно к регуляторам натяжения подъемных и тяговых канатов, выходы которых соединены, соответственно с входами блоков выделения сигналов управления приводом и тягой лебедки, блок регулирования скорости привода поворота.
блок регулирования скорости подъемной лебедки, к входу которого подключен блок выделения сигнала управления приводом лебедки, а выход соединен с двигателем подъемной лебедки, блок регулирования скорости тяговых канатов, соединенный с дви5 гателем тяговой лебедки, датчики натяжения подъемных и тяговых канатов, подключенные к регуляторам натяжения подъемных и тяговых канатов, отличающееся тем, что, с целью повышения надежности рабочего оборудования и механизмов драглайна за счет устранения аварийного режима срыва ковша с бровки забоя, оно снабжено задатчиком скорости привода поворота, первым i вторым управляемыми ключами и компаратором, причем выход задат5 чика скорости привода поворота соединен с основным входом первого управляемого ключа, выход которого подключен к блоку регулирования скорости привода поворота, выходы задатчика и датчика натяжения подъ емных канатов соединены с двумя входа0 ми компаратора, выход которого подключен к управляющим входам обоих управляемых ключей, блок выделения сигналов управления приводом тяги подключен к основному входу второго управляющего ключа, выход которого соединен с блоком регулирования скорости тяговой лебедки.
0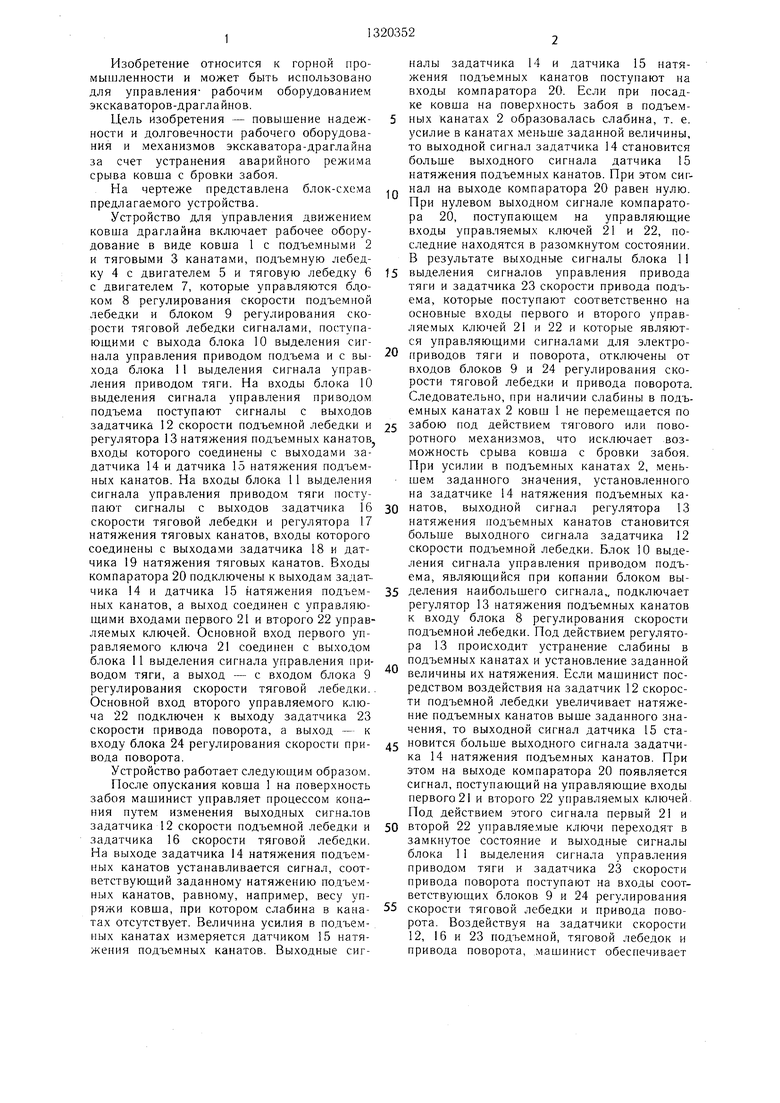

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2005 |
|
RU2278219C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКОВАТРА-ДРАГЛАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2543837C1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1989 |
|
SU1659599A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1989 |
|
SU1659598A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 2010 |
|
RU2443829C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОВША ДРАГЛАЙНА ПРИ КОПАНИИ | 2006 |
|
RU2326212C1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1985 |
|
SU1286694A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1425276A1 |
| Способ управления движением ковша драглайна и устройство для его осуществления | 1982 |
|
SU1084390A1 |
Изобретение относится к горной пром- ти и позволяет повысить надежность и долговечность рабочего оборудования и механизмов экскаватора-драглайна. Это достигается устранением аварийного режима срыва ков- lua с бровки забоя. Управление оборудованием осуществляется блоками 8 и 9 регулирования скоростей подъемной 4 и тяговой 6 лебедок сигналами, поступающими с выходов соотв. блоков 10 и 11 выделения сигнала управления приводами подъема 5 и тяги 7. На входы блоков 10 и 11 поступают соответственно сигналы с выходов задат- чиков 12 и 16 скоростей лебедок 4 и 6 и регуляторов 13 и 17 натяжения подъемных 2 и тяговых 3 канатов. Входы регуляторов 13 и 17 соединены с выходами соответствующих задатчиков 14, 18 и датчиков 15, 19 натяжения канатов 2 и 3. Выходы задатчика 14 и датчика 15 подключены к входам компаратора 20, вы.ход которого соединен с управляюп.1.ими входами управляемых ключей 21 и 22. Ключ 21 включен между блоками 11 и 9, а ключ 22 - между задатчиком 23 и блоком 24 регулирования скорости привода поворота. С помопдью компаратора 20 и ключей 21, 22 осуществляется автоматическая блокировка управляющих сигналов приводов тяги и поворота при наличии слабины в под1)емном канате 2. 1 ил. (О СО ND О СС ел
| Устройство для управления движением ковша-драглайна | 1979 |
|
SU897968A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления движением ковша драглайна и устройство для его осуществления | 1982 |
|
SU1084390A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
