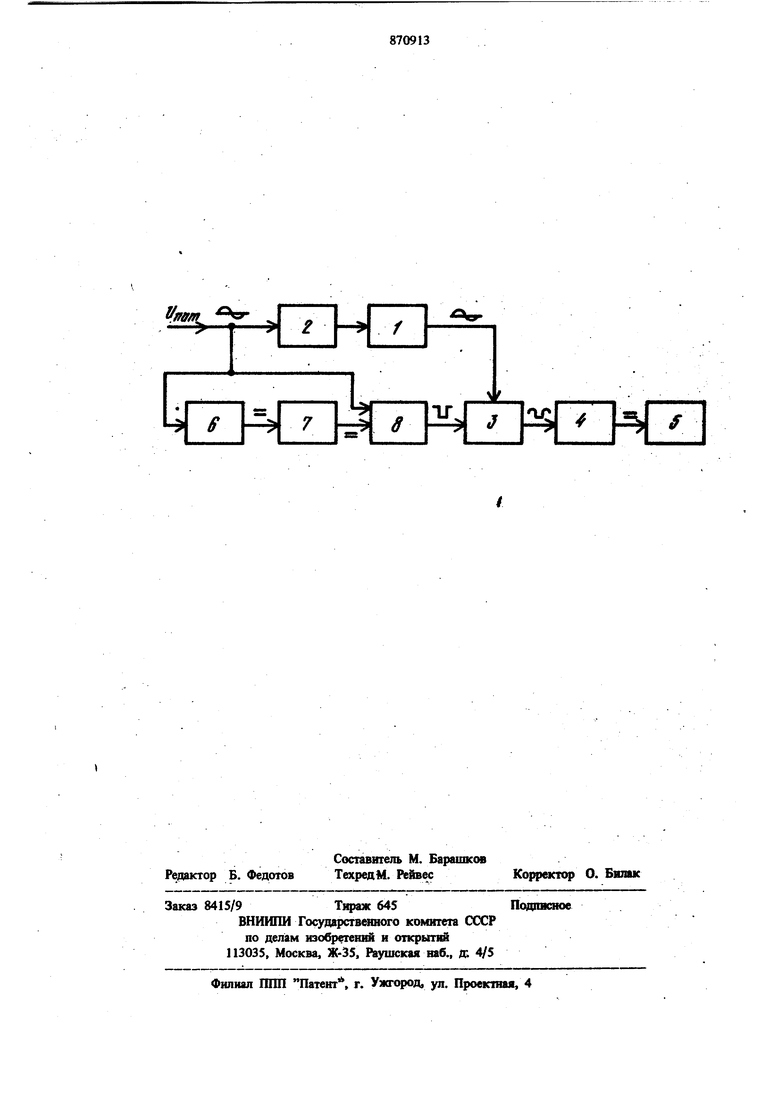
(54) УСТЮЙСТВО ФИКСАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ВЫХОДНОГО ЗВЕНА КИНЕМАТИЧЕСКОЙ ЦЕПИ Изобретение относится к контролю механизмов в машшюстроении, может быть использовано в различных отраслях промышленности, в особенности в точном приборостроении, для контроля мертвого хода механизмов. Известно устройство, позволяющее фиксировать положение выходного звена кинематическо цепи при контроле мертвого хода, содержащее плоское зеркальце или многогранную призму, взаимодействующие с автоколлиматором; переходную втулку, взаимодействующую с оптической делительной головкой, рычаг, взаимодейств щий с индикатором 1. Это устройство можно использовать только дпя контроля кинематических цепей, имеющих выходные валы для установки на них измерительных устройств. Кроме того, оно громоздко. Известио устройство фиксации углового пол жения выходного звена кинематической цепи, содержащее вращающийся трансформатор механизма и соответствующий ему компенсирующий вращающийся трансформатор, блок регистрации и усилитель 2. Недостатком известного устройства является наличие ошибки фиксации положения выходного звена кинематической цепи из-за шумов (гармоник высших порядков) вращающихся трансформаторов, а также из-за погрещностей усилителя, вызванных напряжением смещения и его дрейфом. Целью изобретения является повыщение ТОЧНОСТ7. Цель изобретения достигается тем, что уст-, ройство фиксашш углового положения выходного звена кинематической цепи, содержащее блок рзгистрации и последовательно соединенные компенсирующий вращающийся трансформатор и вращающийся трансформатор, снабжено амплитудным детектором, делителем напряженна, элементом сравнения, сштроиным детектором и фильтром, причем первый вход эяемента сравяепия соединен с входом компенсирующего вращающегося трансформатора и амплйтудаого детектора, выход которого через делитель нап женкя подсоединен к второму входу злемента сравнения, выход которого через соединшные последовательно оптронный детектор и фнльтр 387 присоединен к входу бпока регистрации; выход вращающегося траисформатора соединен с вторым входом оптроиного детектора. На че|ртежё изображена структурная электрическая схема устройства. Устройст;|во содержит вращающийся трансфо{н матор 1, компенсирующий вращающийся .трансформатор 2, оптронный детектор 3, фильтр 4, блок регистрации 5, амплитудный детектор 6, делитель 7 напряжения и элемеит 8 сравиения. Устройство работает следующим образом. Одна из статорных обмоток вращающегося трансформатора 2 подключена к сети питания, другая закорочена. Статорные обмотки вращающегося трансформатора 1, который установлен на выходном звене кинематической цепи, соединены с роторными обмотками компенсирующего вращающегося трансформатора 1, одна из котЬрых подключена к сигнальному входу оптронного детектора. 3. Сигнал с детектора 3, работающего в режиме отсечки, поступает через фильтр 4 на блок регистрации 5. Напряжение сигнала в общем случае., может быть представлено уравнением: . Д (Uw.coea-cosSt вых § SiH J f cos KGcosH iгде КJL - коэффициент передачи детектора; f(t) -закон изменения во времени сигнала поступающего на управляющий вход синхронного детектора; Сэ - угол отсечки; Ц - угол сдвига фазы. В приведенной формуле первое слагаемое определяет величину напряжения основного сиг нала, второе - нечетных гармоник, третье - четнь Х гармоник. Из уравнения следует, что при угле отсечки 30° третья гармоническая составляющая, име-. ющая иаибольщую амплитуду и оказывающая доминирующее влияние на точность измерения, будет,подавлена, будут частично подавлены дру гие гармоники высших порядасов. Управление работой оптроиного детектора 3 при угле отсечки 30 обеспечиваются амплиту ным детектором 6, делителем 7 напряжения и 1элементом 8 сравнения. С выхода амплитудного детектора б постоянное напряжение, равное по величине амплитудному значеиию напряжения, подается на вход делителя 7, обеспечивающего получеийе напряжения на выходе, равного половине амплитудного значения. Это постоянное напряжение подается на первый вход элемента 8 сравнения, на второй его вход подается переменное напряжение с компенсирующего вращающегося траисформатора 2. Сигнал, получаемый на выходе оптронного детектора 3 и направляемый через фильтр иизких частот 4 на блок регистрации 5, полностью освобождается от третьей гармонической составляющей и частично от других гармоник высщих порядков. Для фиксации углового положения выходного звена кинематической цепи в любом требуемом положении производится согласование положения компенсирующего вращающегося трансформатора 2 путем плавного н медленного вращения его ротора с помощью самотормозящегося червячного редуктора до момента регистрации нулевого сигнала вращающегося трансформатора выходного звена блоком 5. Применение настоящего изобретения дает возможность обеспечить измерение мертвого хода прецизионных отсчетных механизмов, выходными звеньями которых являются вращающиеся трансформаторы. Формула изобретения Устройство фиксации углового положения выходного звена кинематической цепи, содержащее блок регистрации и последовательно соединенные компенсирующий вращающийся трансформатор и вращающийся трансформатор, отличающееся тем, что, с целью повыпхения точности, оно снабжено амплитудным детектором, делителем напряжения, элементом сравнения, оптронным детектором и фильтром, причем первый вход элемента сравнения соединен с входом компенсирующего вращающегося трансформатора и амплитудного детектора, выход которого через делитель напряжения подсоединен к второму входу элемента сравнения, выход которого через соединенные последовательно оптрсжный детектор и фильтр присоединен к входу блока регистрации, выход вращающегося трансформатора соединен с вторым входом оптрониого детектора. Источники информации, принятые во внимание при экспертизе 1.Козлов М. П. Зубчатые передачи точного приборостроения. Маышностроение, Москва, 1969, с. 374-375. 2.Черньшюв В. О. Поворотные трансформаторы и нх примшение в вычислительных и автоматических устрЫ1ствах. Энергия, 1965, Москва, с. 31 (ii|xmnim).
Vm
г
1,
M,
or
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство фиксации углового положения выходного звена кинематической цепи | 1981 |
|
SU998854A2 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ ИЗМЕНЕНИЯ НАПРЯЖЕНИЯ | 1992 |
|
RU2025856C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АМПЛИТУДНО-ЧАСТОТНОЙ ХАРАКТЕРИСТИКИ ТРАКТА СВЯЗИ | 1992 |
|
RU2069935C1 |
| Индикаторное устройство | 1989 |
|
SU1747904A1 |
| Преобразователь угол-код | 1979 |
|
SU801020A1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| ПАНОРАМНЫЙ ПРИЕМНИК | 1991 |
|
RU2010244C1 |
| ИНДИКАТОРНОЕ УСТРОЙСТВО | 1991 |
|
RU2005993C1 |
| Анализатор гармоник | 1980 |
|
SU945821A2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2010 |
|
RU2444461C1 |