Изобретение относирся к контролю механизмов в машиностроении и может ,быть использовано в различных отраслях промышленности и, в особенности, в точном приборостроении для контроля кинематической погрешности механизмов.
По основному авт.св. № 870913 известно устройство фиксации углового положения выходного звена кинематической цейи, используемое преиму щественно в точном приборостроении для контроля мертвого хода механизма.
Устройство выполнено в виде при- . бора, содержащего блок регистрации, последовательно соединенные компенсирующий вращающийся трансформатор . и вращающийся трансформатор амплитудный детектор, делитель напряжения, элемент сравнения, оптронный детектор и фильтр. Первый вход элемента сравнения соединен с входом компенсирующего. ;вращающегоС9 трансформатора и амплитудного детектора, выход которого через делитель напряжения подсоединен к второму входу элемента сравнения, выход которого через coe-i динейные последовательно оптроннай детектор и фильтр присоединен к входу блока регистрации, а выход вращающегося трансформатора соединен вторым вводом оптронного детектора 1.
Недостатком известного устройства является то, что его можно использовать для фиксации угловых Положе- НИИ выходного звена кинематической цепи только раздельно для каждого заданного положения, т.е. при каж10дом новом контролируемом положении требуется подстройка компенсирующего вращающегося трансформатора. .
Целью изобретения является расширение функциональных возможностей
15 за счет обеспечения непрерывной фиксации,. .
Цель достигается тем, что устрой-, ство фикса1ши углового положения выходного звена кинематической цепи,
20 содержащее блок регистрации и- последовательно соединенные компенсирующий вращаиадийся трансформатор и вращавмдийся -трансформатор, а также амплитудный детектор делитель напря25жений, элемент сравнения, оптронный детектор и фильтр, в котором первый вход элемента сравнения соединен с входом компенсирующего вращающегося трансформатора и амплитудного детек30тора, выход которого через делитель
напряжения подсоединен к второму входу элемента сравнения, выход которого через соединенные последователь но оптронный детектор и фильтр присоединен к входу блока регистрации, выход вращающегося трансформатора соединен с вторым входом оптронного детектора, снабжено вращающимся трансформатором, шипом, закрепленным, на его роторе, профилированным кулачком, установленным на оси компенсирующего вращающегося трансформатора и взаимодействующим с шупом, и двумя масштабными вращающимися . , трансформаторами , причем первый ход вращающегося трансформатора подключен через первый масштабный вращающийся трансформатор к первому входу компенсирующего вращающегося трансформатора, а второй - через второй масштабный вращающийся трансформатор к второму входу компенсирующего вращающегося трансформатора, при этом ротор компенсирующего . вращающегося трансформатора кинематически связан с ротором вращающегося трансформатора контролируемой цепи.
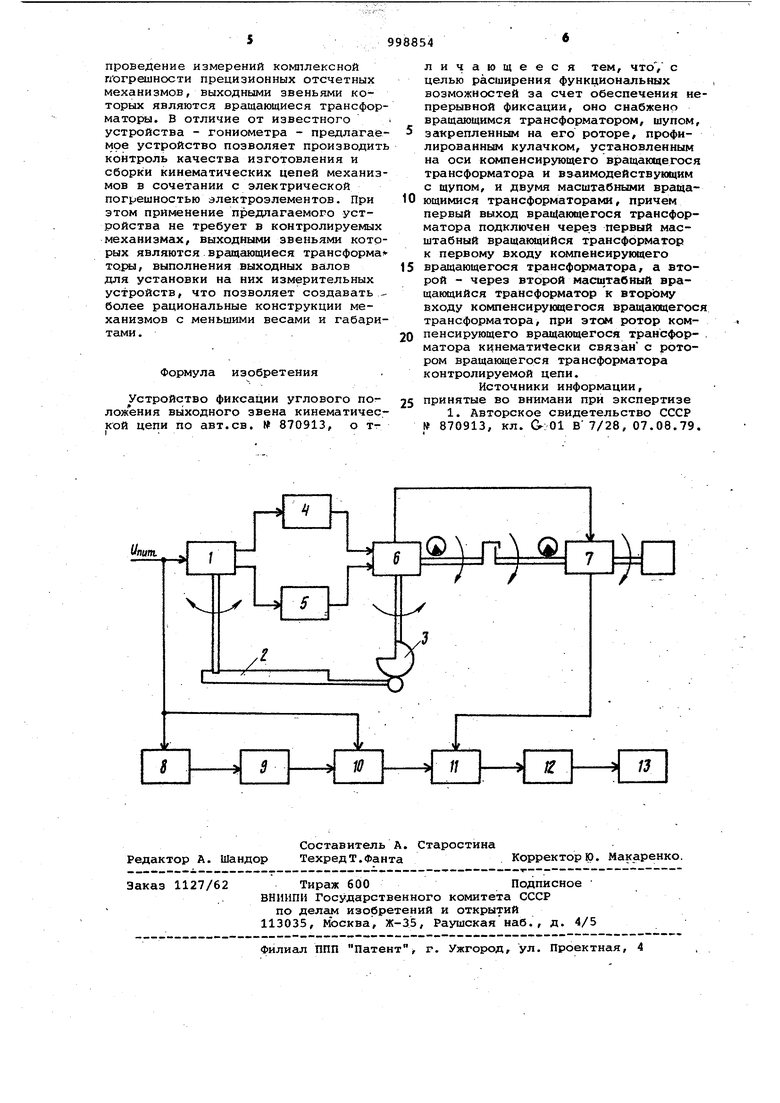
На чертеже изображена блок-схема описываемого устройства.
Устройство включает вращающийся трансформатор 1, щуп 2, установленный на роторе вращающегося трансформатора 1, кулачок 3, установленный на роторе компенсирующего вращающегося трансформатора с профилем, корректирующим кинематическую погрешность образцовой кинематической цепи и электрическую ощибку компенсирующего вращающегося трансформатора, два масштабных вращающихся трансформатора 4 и 5, компенсирующий вращающийся трансформатор 6, установленный на выходном звене образцовой кинематической цепи, вращакйцийся трансформатор 7, установленный на выходном звене контролируемой кинематической цепи; амплитудный детектор 8, делитель напряжения 9., элемент 10 сравнения,. оптронный детектор 11, фильтр 12, блок 13 регист.рации..
Первая статорная обмотка вращающегося трансформатора подключена к сети питания, вторая статорная обмо1 ка закорочена. Первая роторная обMQTKa вращающегося трансформатора 1 через масштабный трансформатор 4 подключена к второй статорной обмот ке компенсирующего вращающегося трансформатора6, а вторая роторная обмотка - через масштабный трансформатор 5 - к первой статорной обмотке. Вторые статорные обмотки масштаб ных трансформаторов 4 и 5 закорочены. Первая роторная обмотка компенсирующего вращающегося трансформатора.6 подключена к второй статорной обмотке вращающегося трансформатора 7 контролируемой цепи, а вторая роторная обмотка к первой статорной обмотке. Первая роторная обMOTj a вращающегося трансформатора 7 соединена- с сигнальным входом оптронного детектора 11 и далее через фильтр 12 с блоком 13 регистрации. Вторая роторная обмотка вращающегося трансформатора 7 свободна.
Образцовая и контролируемая кинематические цепи связаны мезвду собой звеньями цепей с одинаковой ценой оборота. При этом роторы вращающихся трансформаторов 1, б и 7 установлены в положениях, при которых в первых роторных обмотках равен нулю.
Масштабный вращающийся трансформатор 4 обеспечивает согласование масштаба профиля кулачка 3 с углом поворота ротора вращающегося трансформатора 1. .
Масштабный трансформатор 5 обеспечивает симметрирование нагрузки.
При вращении образцовой и контролируемой кинематических цепей профилированный кулачок 3, взаимодействует со щупом 2, который поворачивает ротор вращающегося трансформатора 1. При этом в роторных обмотках вращающегося трансформатора 1 вырабатываются напряжения, корректирую-щие основной сигнал вращающегося трансформатора 6 от искажений, вы звань ых кинематической погрешностью образцовой кинематической цепи и го электрической погрешностью образцово кинематической цепи и электрической погрешностью вращающегося трансформатора 6. В результате, в роторных обмотках вращающегося трансформатора 6 индуцируе1Х;я напряжения U и U/2, которые определяют угол поворота вы ходкого звена образцовой кинематической цепи dLarc-tgCU достаточ. ной для.практических целей.точностью ошибка Л. о( ,001°) .
Вращающийся трансформатор 7 выходного звена контролируемой кинематической цепи подключен в режиме согласования к вращающемуся трансформатору 6 образцовой кинематической цепи. При совместном вращении образцовой и контролируемой кинематических цепей блоком 13 регистрации будет непрерывно фиксироваться сигнал рассогласования вращающихся трансформаторов 6 и 7, пропорциональный комплексной погрешности, которая определяется кинематической погрешностью контролируемой кинематической цепи и электрической погрешностью вращающегося трансформатора 7.Применение предлагаемого устройства дает возможность обеспечить
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство фиксации углового положения выходного звена кинематической цепи | 1979 |
|
SU870913A1 |
| Двухотсчетный преобразователь углапОВОРОТА ВАлА B КОд | 1979 |
|
SU840995A1 |
| Индикатор симметричности двухфазной системы напряжений | 1983 |
|
SU1129549A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU669374A1 |
| Устройство для раздельной индикации квадратуры и равенства амплитуд двух гармонических сигналов | 1984 |
|
SU1200194A1 |
| Преобразователь кода в угол поворота вала | 1985 |
|
SU1312741A1 |
| Устройство для контроля параметров синусно-косинусного вращающегося трансформатора | 1989 |
|
SU1720128A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Устройство для измерения удельной электропроводности | 1982 |
|
SU1070464A1 |
| Способ определения частотных погрешностей масштабных преобразователей | 1989 |
|
SU1756842A2 |
