: 1 ,
Изобретение относится к устройствам, дистанционного контроля положения рабочих органов механизмов и может быть использов,ано, в частности, для контроля положения регулируквдих органов в аппаратах нефтяной и химической промышленности.
Известен датчик положений рабочего органа механизма на магнитоуправляемых контактах, отличающийся повышенной надежносугью работы, содержа- щий ПОСТОЯННЫЙ магнит, установленный на контролируемом органе, реле контроля, магнитоуправляемый контакт (МК) с обмоткой подмагничивания, рт ключаюшее реле, втэемязадающую деПь. Обмотка подмагничивания подключена через контакты реле контроля napaLrtле.льнр его обмотке и создает при включении последнего поток, направленный встречно потоку постоянного магнита. При этом МК после кратковременного нахождения в замкнутом состоянии разлыкается, а реле контроля остается во включенном состоянии . При отходе магнита от точки контроля МК снова замыкается под дейстт вием поля катушки подмагничивания, включается отключающее реле и своим размыкающим контактом, через который
питается вся схема, обесточивает устройство. МК в данном устройстве за весь цикл работы датчика замыкается дважды, при подходе постоянного магнита к точке контроля МК замыкается на время включения реле контроля, и при отводе магнита он Зс1мыкается на время включения отключающего реле, определяемое времязадающей цепочной..
10 Остальное время МК находится в разомкнутом состоянии, что позволяет иметь практически неограниченный ресурс работы МК в датчике l}Однако известное устройство обла15дает таким существенным недостатком, как возможность выдачи ложного сигнала при выведении постоянного магнита из зоны срабатывания МК, связанная с возникновением паразитных
20 автоколебаний подвижной систеки отк.пючающего реле, при которых якорь реле не достигает сердечника электромагнита реле .Наиболее близким к предлагаемому
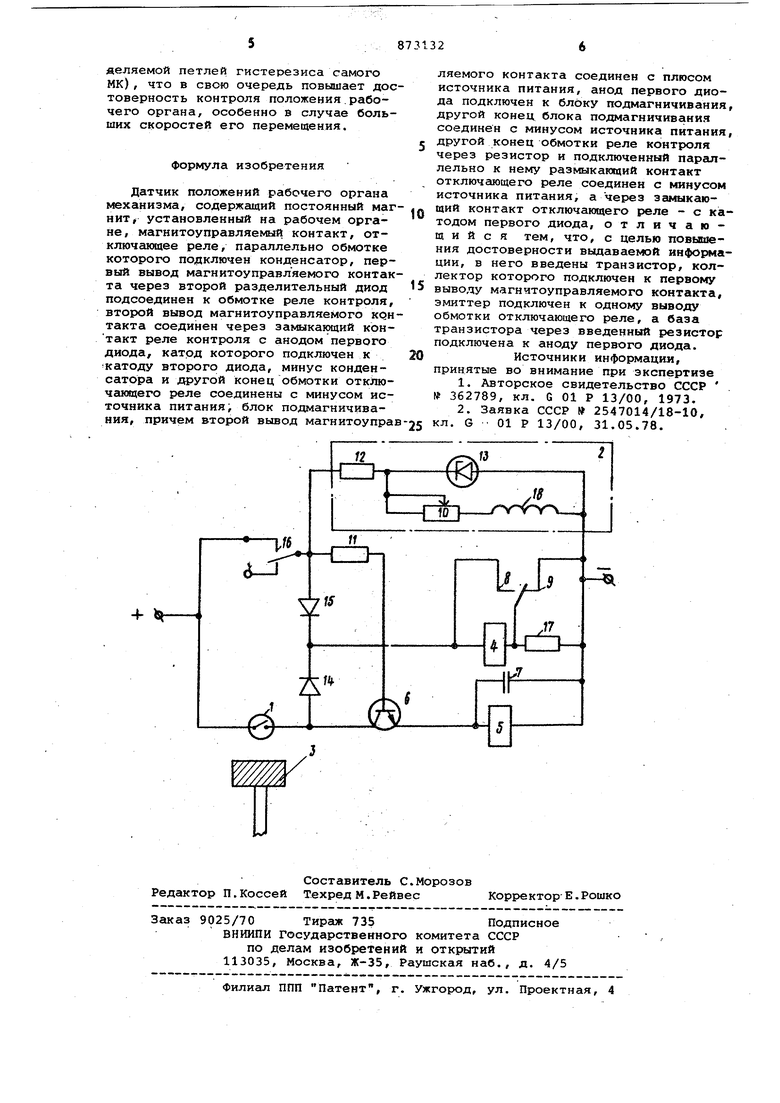
25 по технической сущности является : устройство, в котором последовательно с обмоткой реле контроля включен дополнительный резистор, с включенным параллельно ему нормально-замк30нутым контактом отключающего реле, нормально-разомкнутый контакт которого подключен параллельно обмотке реле контроля, а точка соединения одного из выводов МК и нормально-разомкнутого контакта реле ко{ троля подключены непосредственно к плюсу источника питания. Такое выполнение устройства позволяет не меняя требований к контактным системам существующих реле, устранить возможность возникновения паразитных автоколебаний реле в схеме датчика, и тем самым исключить возможность выдачи лож ной информации и повысить надежность работы датчика 2. Однако в данном устройстве наличие времяЭадающей цепи с достаточно большой постоянной времени, необходимой для обеспечения перехода устройства в выключенное состояние, не позволяет обеспечить бесгистерезисный режим работы (или достаточно ма.лый дифференциал хода), что в ряде случаев существенно ограничивает воз можность применения устройства,- особенно при больших скоростях перемещения контролируемого органа, когда сигнал об уходе контролируемого орга на из точки контроля поступает с бол шим запозданием по отношению к .дейст вительному положению контролируемого органа. Цель изобретения - повышение дост верности выдаваемой информации. Поставленная цель достигается тем, что в датчик положений рабочего . органа механизма, содержащий постоя ный магнит, установленный на рабочем органе, магнитоуправляемый контакт, отключающее реле, параллельно обмот ке которого подключен конденсатор, первый вывод магнитоуправляемого ко такта через второй разделительный диод подсоединен к обмотке реле конт ,. роля, второй вывод магнитоуправляемого контакта соединен через замыкаю щий контакт реле контроля с анодом первого диода, катод которого подклю чен к катоду второго диода, минус конденсатора и другой конец обмотки отключающего реле соединён с минусом источника питания, блок подмагничивания, причем второй вывод магнитоуправляемого контакта соединен с плю сом Источника питания, анод первого диода подключен к блоку подмагничивания, другой конец блока подмагнич вания соединен с минусом источника пит(ания, другой конец обмотки реле через резистор и подключен ный параллельно к нему размыкающий контакт отключгиощего реле соединен минусом источника питания, а через замыкающий контакт отключающего реле с катодом первого диода, введен транзистор, коллектор которого подключен к первому вывоЯ магнитоупра ляемого контакта, эмиттер подключен к одному выводу обмотки отключающего реле, а база транзистора через введенный резистор подключена к аноду первого диода. Такое выполнение устройства, сохраняя все достоинства известных устройств , позволяет исключить влияние времязадающей цепи на процесс выклю чения устройства, до минимума уменьшить дифференциал хода датчика и повысить достоверность выдаваемой им информации. На чертеже изображена схема предложенного датчика. Устройство содержит магнитоуправляемый контакт (МК) 1, блок 2 подмагничивания, постоянный магнит 3, реле 4 контроля, отключающее реле 5, транзистор 6, конденсатор 7, переключаю-, щие контакты 8 и 9 отключающего реле, переменный резистор 10, резисторы 11 . и 12, стабилитрон 13, разделительные диоды 14 и 15, нормально открытый контакт 16 реле контроля 4, резистор 17 обмотку 18 подмагничивания. Устройство работает следующим образом. При перемещении магнита 3 в точку контроля замыкается МК 1, и положительный потенциал источника питания через МК 1 и разделительный диод 14 поступает на обмотку реле 4 контроля, которая подключена к минусу источника питания через размыкающий контакт 9 отключакяцего реле 5. Реле 4 контроля включается и встает на самоблокировку через собственный контакт 16 и диод 15. По обмотке подмагничивания 18 начинает протекать ток, создающий поток/ направленный встречно потоку постоянного магнита 3, в результате потоки обмотки и магнита компенсиру1ЮТСЯ, и МК 1 размыкается. Реле 4 контроля остается включенным, сигнализируя о наличии контролируемого органа в точке контроля. За время нахождения МК 1 в замкнутом состоянии отключающее реле 5 не включается, так как транзистор 6 в течение этого времени не включится из-за большой постоянной времени в базовой цепи транзистора 6, определяемой величиной конденсатора 7 и дополнительного резистора 11. При удалении магнита 3 от точки контроля нарушается компенсация пото ;ов, и на МК начинает действовать только поле обмотки, под действием которого МК 1 замыкается, транзистор б открывается и включает отключающее реле 5, которое, переключая свои контакты 8 и 9, закорачивает обмотку реле 4 контроля. Последнее обесточивается, размыкает свой контакт 16, и схема возвращается в исходное состояние . Таким образом, применение предлагаемого устройства позволяет уменьшить дсРминимума его дифференциал хода (практически до величины, опре
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления работойпуТЕВОгО ВыКлючАТЕля | 1979 |
|
SU805437A1 |
| Устройство для управления работой путевого выключателя | 1977 |
|
SU700879A1 |
| Бесконтактный датчик положений рабочего органа механизма | 1977 |
|
SU708232A1 |
| Устройство для управления работой путевого выключателя | 1979 |
|
SU807878A1 |
| Путевой выключатель | 1978 |
|
SU855777A1 |
| Датчик положения | 1981 |
|
SU1001140A1 |
| Устройство для управления работой путевого выключателя | 1975 |
|
SU613416A1 |
| Бесконтактный датчик положений рабочего органа механизмов | 1974 |
|
SU491898A1 |
| Преобразователь перемещенийВ АНАлОгОВый СигНАл | 1978 |
|
SU815477A1 |
| Бесконтактный путевой выключатель | 1973 |
|
SU529502A1 |
