Изобретение относится к устройствам дистанционного контроля положения рабочих органов механизмов и может быть использовано, в частности, для контроля положения регулирующих органов ядерных реакторов и в аппаратах, используемых в химической и нефтяной отраслях промышленности. Известно устройство, содержащее магнитоуправляемый контакт (МУК) с обмоткой подмагничивания, реле контроля, конденсатор, тиристор и рюзисторы LI J. Недостатком устройства является то, что при отводе магнита (когда МУК замкнется под действием поля, создаваемого обмоткой подмагничквания) через него проходит импульс тока разряда конденсатора по величине, близкой к предел но допустимом для МУК, который може привести к выводу из строя МУК. Наиболее близким к изобретению по технической сущности является устройство, содержащее источник питания, МУК с обмоткой подмагничивания, магнит, установленный на рабочем органе, реле контроля, отключающее реле, конденсатор , резисторы 2. Недостатком устройства является возможность выдачи ложного сигнала при вьшедении постоянного из зоны срабатывания датчика. Выдача ложного сигнала связана с возникновением паразитЕ1Ых автоколебаний подвижной системы отключающего реле, при которых якорь не достает сердечника электромагнита реле. Цель изобретения - исключение вьщачи ложных сигналов и повышение быстродействия устройства. Ноставленная цель достигается тем, что в предлагаемое устройство введены .резистор и стабилитрон, причем второй Быьод магнитоуправляемого контакта соединен с плюсом источника питания, анод первого диода подключен через переменный резистор к обмотке подмагничивания, параляелгтно которой подключен стабилитрон, другой конец обмотки поаагничивания соединен с минусом источика питания, другой конец реле контроя через ввэдениый резистор и параллельно подключенный к нему размыкающий контакт отключающего реле соединен с минусом источника питания, а через замыкающий контакт отключающего реле катодом первого диода.
CymiiocTb изобретения поясняется схемой, изображенной на чертеже.
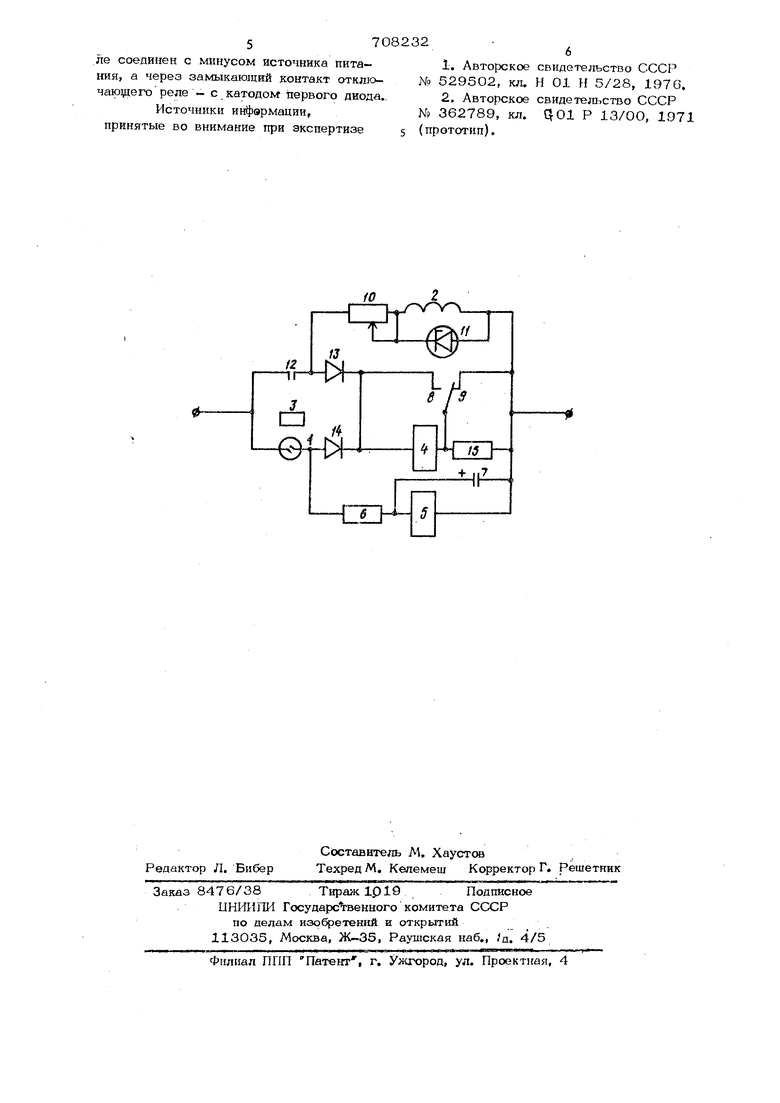
Устройство содержит магнитоуправляемый контакт 1, обмотку подмагничи- вания 2, постоянный магнит 3, реле контроля 4, отключающее реле 5, времязадающую цепочку из резистора 6 и конденсатора 7, переключающие контакты 8,9, отключающее реле, переменный резистор 1О и подключенный к нему стабилитрон 11, питание от источника тока на реле контроля поступает через собственный контакт 12, первый и второй разделительные диоды 13, 14 и резистор 15.
Работает устройство следующим образом.
При перемещении механизма перемешается вместе с ним магнит 3. Достигнув точки контроля, магнит замыкает магнитоуправляемый контакт 1, положительный потегщиал источника питания (на чертеже не показан) через замкнутый МУК и диод 14 поступает на обмотку реле контроля 4, которая подключена к минусу источника питания через размыкающийся контакт 9 отключаю- . щего реле 5.
Реле контроля 4 включается и встает на самоблокировку через собственный контакт 12 и диод 13. По обмотке подмагничивания 2 начинает протекать ток, создающий поток, направленньи встречно потоку постоянного магнита 3, в результате потоки обмотки и магнита компенсируются и магнитоуправляемый контакт 1 размыкается. Реле контроля 4 остается включенным, сигнализируя о наличии контролируемого органа в точке контроля. За время включения и отключения МУК отключающее р.еле 5 не успевает включатЕэся, так как питается через времязадающую цепочку, cocTosuuyio из резистора6 и конденсатора 7. При отходе контролируемого органа от точки контроля вместе с ним отходит и магнит 3. Компенсация потоков нарущается, и на МУК начинает действовать- только поле, создаваемое обмоткой подмагни- чивания 2, под действием которого МУК
замыкается. Через время определяемое времязадающей цепочкой включается отключающее реле 5, переключая свои контакты 8 и 9, в результатхэ чего обмотка реле контроля 4 оказьшается закороченной контактом 8,
Величина резистора 15 гарантирует удерл.ание контакта 12 реле контроля 4 в замкнутом состоянии в течение времени, необходимого для ггадежного срабатывания отключающего реле 5.
Реле контроля 4 обесточивается размыкает свой контакт 12, и схема возвращается в исходное (обесточенное) состояние.
С помощью переменного резистора 10 выбирается необходимьШ ток, перетекающий по обмотке подмагничивания 2, создающий компенсирующий поток.
Стабилитрон 11 стабилизирует напряжение питания обмотки подмагничива- ния и одновременно стабилизирует точку отключения .схемы.
Формула изобретения Бесконтактный датчик положений рабочего органа механизма, содержащий постоянный магнит, установленный на рабочем органе, магнитоуправляемый контакт,первый вывод ц которого соединен через резистор времязадающей цепочки с обмоткой отключающе реле, параллельно которой подключен, конденсатор, а через второй разделительный диод подсоединен х обмотке реле контроля, второй вьтод магнитоуправляемо- го контакта соеди(юн через замыкающий контакт реле контроля с анодом первого диода, катод jcoToporo .подключен к , катоду второго диода, минус конденсатора и другой конец обмотки отк.шочающего реле соединены с минусом источника питания, переменный резистор и обмотку подмагиичивания, отличающийся тем, что, с целью исключения вьщачи ложных сигналов и повьщ1ения быстродействия, введены резистор и стабилитрон, причем второй вывод магнитоуправляемого контакта соединен с плюсом источника питания, анод первого диода подключен через переменный резистор к обмотке подмагни- чивапия, параллельно которой подключен стабилитрон, другой конец обмоткп под- магничивания соединен с минусом источника питания, другой конец обмотки реле контроля через введенный резистор и параллельно подключенный к нему ; размьшающий контакт отключающего реле соединен с минусом источника питания, а через замыкающий контакт отключающегореле - с катодом первого диода.. Источники инфврмации, принятые во внимание при экспертизе 708232 N9 N9 (пр 1.Авторское свидетельство СССР 529502, кл. Н 01 Н 5/28, 1976. 2.Авторское свидетелг ство СССР 362789, кл. Q01 Р 13/00, 1971 ототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления работой путевого выключателя | 1977 |
|
SU700879A1 |
| Датчик положений рабочего органа механизма | 1979 |
|
SU873132A1 |
| Устройство для управления работой путевого выключателя | 1975 |
|
SU613416A1 |
| Устройство для управления работой путевого выключателя | 1979 |
|
SU807878A1 |
| Устройство для управления работойпуТЕВОгО ВыКлючАТЕля | 1979 |
|
SU805437A1 |
| Путевой выключатель | 1978 |
|
SU855777A1 |
| Бесконтактный датчик положений рабочего органа механизмов | 1974 |
|
SU491898A1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЙ РАБОЧЕГО ОРГАНА МЕХАНИЗМОВ | 1973 |
|
SU362789A1 |
| Бесконтактный датчик положения рабочего органа механизма | 1975 |
|
SU676859A1 |
| Устройство для защиты асинхронного двигателя от перегрузки | 1980 |
|
SU961027A1 |
/г
W
1Г
i
