(54) СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО ПОТОКА В СЛОЕ РОТОРА АСИНХРОННОГО-ДВИГАТЕЛЯ
I
Изобретение относится к эпектрическим машинам, в частности к способам опредепения магнитного потока при различных скольжени51х в многослойном роторе асинхронного двигателя.,
Известен способ определения магнй- ного потока в любом из слоев ротора, при котором слой ротора охватътается в осевом сечении измерительной обмоткой с известным числом витков. Эта обмотка подключается к измерителю напряжения через коллектор, установленный на роторе. Подачей питания на двигатель ротор приводится во вращение и при этом производят измерение его скорости и скольжения, и электродвижущей силы (ЭДС) измерительной обмотки, установленной на слое ротора. Измеренные величины ЭДС (при известном копкнест ве витков измерительной обмотки) пересчитываются в величину магнитного потока. Так получают зависимость величины магнитного потока в слое ротора от величины скольжения 1 .
Недостатком этого способа является JTO, что в высокоскоростных электродвигателях необходимость вращения изме- рительной обмотки и коллектора, установленных на роторе, приводит к недопустимым разбалансировке и вибрации ротора, потере контакта на коллекторе, в результате чего реализация данного способа представляет определенную сложность, а точность измерений снижается.
to
Цепь изобретения - повышение точности.
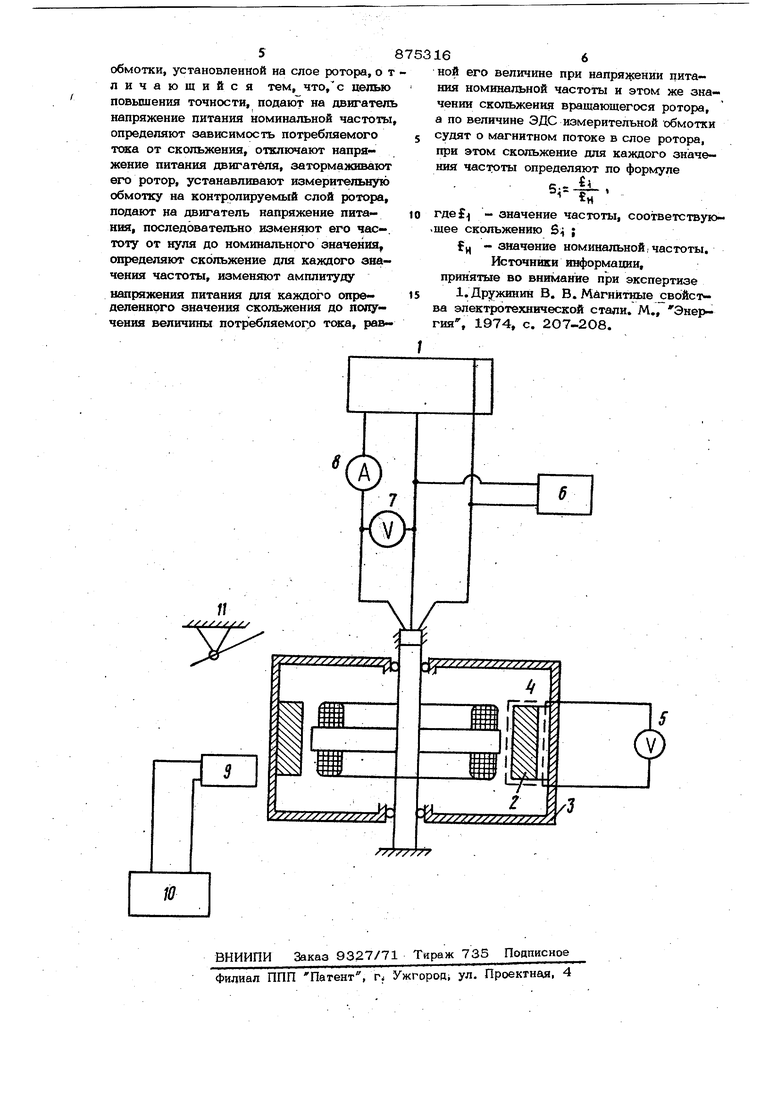
Поставленная цель достигается тем, что в способе определения магнитного потока в слое ротора асинхронного дви15гателя, заключающемся в том, что определяют скольжение и ЭДС измерительной обмотки, установленной на слое ротора, подают на двигатель напряжение питания номинальной частоты, определяют завиМсимость потребляемого тока от скольжения, оталючают напряжение питания двигателя, затормаживают его ротор, устанавливают обмотку на контролируемый спой ротора, ПС дают на двигатель нап. ряжение питания, последовательно изменяют его частоту от нуля до номинального значения, определятот скольжение для каждого значения частоты, изменяют амплитуду напряжения питания для каж дого определенного значения скольжения д получения величины потребляемого тока; равной его величине при напряжении питания номинальной частоты и этом же качении скольжения вращающегося ротора, а по величине ЭДС измерительной обмотки судят о магнитном потоке в слое ротора, при этом скольжение для каждого Эначения частотьт определяется по формулезначение частоты, соответствую щее скольжению S;j; м - значение номинальной частоты. На чертеже схематично показано устройство для реализации предлагаемого способа Устройство включает в себя преобра-; эоватепь 1 частоты, контролируемый слой 2 ротора 3 гидродвигателя, на котором предусмотрена возможность установки измерительной обмотки 4, соединенной с измерителем 5 напряжения. Для измерения частоты, напряжения и тока питания двигателя включены соответстве но частотометр 6, вольтметр 7 и амперметр 8, Для измерения скольжения вклк чен датчик 9 скорости и измеритель 10 скольжения. Для затормаживания ротора 3 установлен фиксатор 11. Способ осуществляется следующим об разом. На двигатель подают номинальное напряжение питания частотой н с преобразователя 1 частоты. При этом ротор 3 гидродвигателя находится в свободном, т. е. в незаторможенном состоянии. Дар чиком 9 скорости и измерителем 1О х;кольжения измеряют скольжение 3 ротора 3, а амперметром 8 измеряют соответствующий скольжению 5 потребляе мый ток Л для нескольких фиксированных точек от единицы до номинального значения скольжения 5ц. Строят-зависимость потребляемого тока 3 от скол жения $. . После этого напряжение питания двигателя отключают, фиксатором 11 затормаживают ротор 3 и на слой 2 устанавливают измеритеттьную обмотку 4 На двигатель подают Напряжение питания частотой , находят скольжение S как отнощение частот / 5 преобра164зоватепем 1 устанавливают напряжение питания такой величины, чтобы потребляемый ток, регистрируемый по амперметру 8, бьш равен потребляемому току 3 замеренному при скольжении вращающегося ротора 3 и номинальном напряжении питания. Измерителем 5 напряжения измеряют электродвижущую силу (ЭДС), возникающую в измерительной обмотке 4. Измеренную величину ЭДС пересчитывают в величину магнитного потока по формуле 4.lCg -Wгде Е - измеренная ЭДС; 9 - число витков измерительной обмотки 4; - фиксированная частота переменного тока в измерительной об- мотгасе 4 ; коэффициент фирмы кривой измеряемой ЭДС. Изменяя частоту преобразователя 1 от значения близкого к нулю до номинального ( для нескольких фиксированных частот , находят зависимость величины магнитного потока ф в слое ротора 3 от его скольжения S . Частота f. тока во вторичной обмотке ротора 3 и измеряемый поток ф в слое ротора 3 при этом соответствуют реальному скольжению при вращающемся роторе 3, При этом скольжение асинхронного двигателя равно . гн н где$п; - частота тока во вторичной обмотке ротора 3 при скольжении f - номинальная частота питания двигателя. Определение зависимости изменения магнитного потока в слое многослойного ротора 3 от скольжения при его неподвижном состоянии упрощает процесс измерения и позволяет исследовать влияние геометрических размеров и электромагнитных свойств слоев ротора 3 на распределение магнитных потоков в них и, тем самым, позволяет отрабатътать конструкцию двигателя. Формула изобре тения Способ опрюделения магнитного потока в слое ротора асинхронного двигателя, заключающийся в том, что определяют скольжение и ЭДС измерительной