,.
I
4
tn.
чен выход датчика вращения ротора, а выход блока суммирования соединен с входом регулирования частоты преобразователя. Кроме того, устройство содержит канал регулирования потока, подключенный к входу регулирования напряжения преобразователя.
Данное устройство осуществляет регулирование с постоянным моментом, однако не учитывает изменение характеристик двигателя в результате нагрева.
Цель изобретения - повышение точности регулирования момента.
Постав.тенная цель достигается тем, что в устройство для управления асинхронным электродвигателем с постоянным вращающим моментом, содержащее преобразователь частоты и напряжения, выход которого подключен к асинхронному электродвигателю с короткозамкнутым ротором, датчик частоты вращения ротора, датчик мгновенного значения тока статора, регулятор скольлсения, выход которого соединен с одним входом первого блока суммирования, к второму входу которого подключен выход датчика частоты вращения ротора, а выход блока суммирования соединен с входом регулирования частоты преобразователя, регулятор магнитного потока, подключенный к входу регулирования напряжения нреобразователя и задатчик магнитного потока, введены датчик ЭДС, соединенный с входом регулятора магнитного потока, и процессор тока статора, составленный из блока вычитания мгновенного значения мощности, блока вычисления среднего значения мощности, блока вычитания средне-квадратичного значения ЭДС и блока деления, причем входы блока вычитания мгновенного значения мощности соединены с датчиком ЭДС и датчиком тока статора соответственно, а выход - с блоком вычитания среднего значения мощности, вход блока вычитания средне-квадратичного значения ЭДС соединен с датчиком деления, второй вход которого соединен с блоком вычисления среднего значения, мощности, выход которого подключен к входу регулятора скольжения.
Кроме того, указанное устройство может быть дополнительно снабжено вторым блоком суммирования, входы которого соединены с задатчиком момента и выходом блока вычисления среднего значения мощности, а выход с регулятором скольжения.
Дополнительно оно может быть снабжено третьим блоком суммирования, выпрямителем, усилителем и блоком умножения, причем выход регулятора моментного потока через выпрямитель связан с одним входом третьего блока суммирования, к второму входу которого подключен задатчик магнитного потока, а выход третьего блока суммирования через усилитель подключен к первому входу блока умножения, второй
TU
778721
вход которогосоединен с выходом первого блока суммирования.
В соответствии с изобретением принцип системы управления двигателем для привода с асинхронным двигателем, снабженным преобразователем мощности с управляемым напряжением и частотой, достигается путем поддержания заданной величины потока через воздушный зазор (обычно номинального потока) при одновременном поддержании заданной величины активной составляющей тока статора, получаемой в соответствии с измеряемым действительным напряжением в зазоре. Таким образом, мощность в зазоре и, следовательно, вращающий момент регулируется независимо от изменения сопротивления ротора и изменений других параметров.
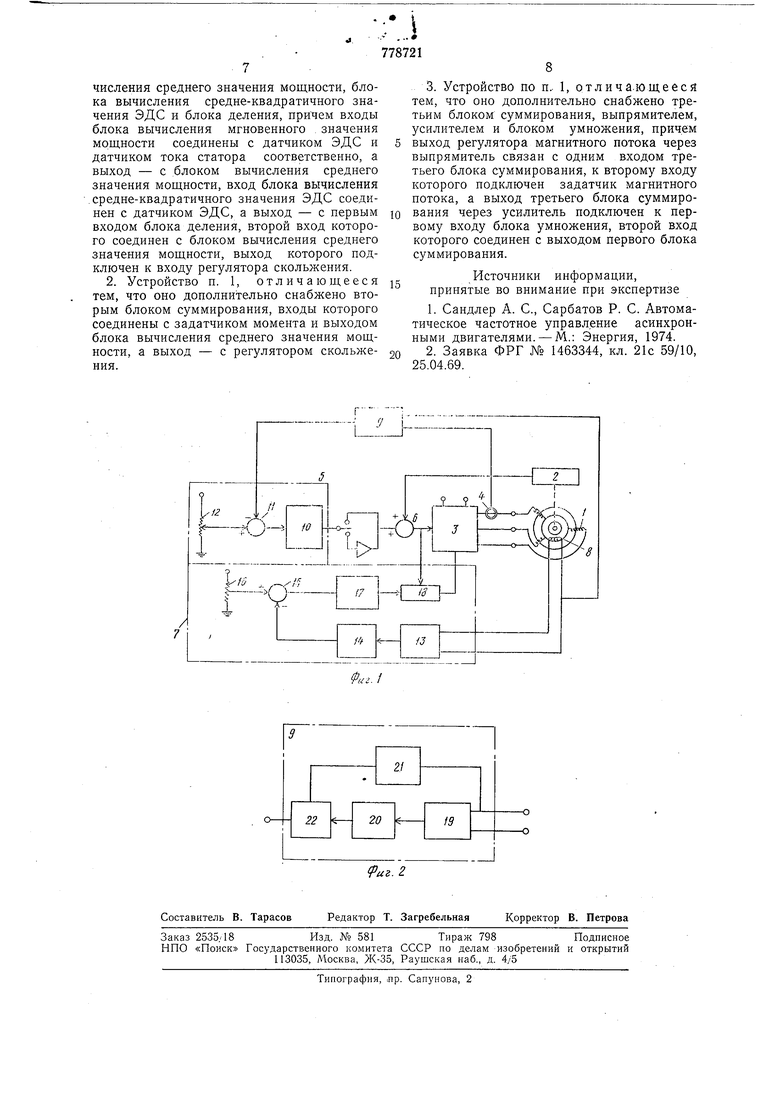
На фиг. 1 приведена блок-схема устройства; на фиг. 2 - выполнение процессора активной составляющей тока.
Устройство для управления асинхронным электродвигателем 1 (фиг. 1) содержит датчик 2 вращения ротора, подсоединенный к преобразователю 3 частоты и напряжения.. Ток двигателя измеряется датчиком 4 мгновенного значения тока. Регулятор 5 частоты скольжения соединен с первым блоком. 6 суммирования, второй вход которого соединен с датчиком 2 вращения ротора. Регулятор 7 магнитного цотока подключен к входу регулирования напряжения преобразователя 3, а входом - к датчику 8 электродвижущей силы электродвигателя 1. Процессор 9 тока статора соединен входами с датчиком 4 тока и датчиком 2 частоты вращения ротора, а выходом - с регулятором 5 частоты скольжения.
Регулятор 5 частоты скольжения содержит регулятор 10 частоты скольжения и второй блок 11 суммирования, соединенный с задатчиком 12 момента. Регулятор 7 магнитного по.тока содержит датчик 13 потока, выход которого через выпрямитель 14 подсоединен к третьему блоку 15 суммирования, к которому одновременно подсоединен задатчик 16 магнитного потока, а выход блока 15 соединен с усилителем 17. Выход усилителя 17 соединен с умножителем 18, второй вход которого соединен с выходом первого блока 6 суммирования, а выход - с входом регулирования напряжения преобразователя 3.
Процессор 9 тока статора (фиг. 2) содержит блок 19 вычисления мгновенного значен.ия мощности, соединенный входами с датчиками. 4 и 8, а выходом - с блоком 20 генерирования среднего сигнала мощностн; блок 21 вычисления средне-квадратичного значения электродвижущей силы, соединенный входом с датчиком 8 э.лектродвижущей силы, а выходом - с первым входом блока 22 деления, второй вход которого соединен с блоком 20, а выходом - к входу канала регулирования частоты скольжения. Работает устройство следующим образом. Процессор тока статора вычисляет активную составляющую тока следующим образом. Сигнал датчика напряжения в воздушном зазоре EismK)t и сигнал датчика, сдвинутого по фазе мгновенного тока статора /isin((), подаются на блок 19 для получения сигнала мгновенной мощности. Сигнал средней мощности Pav создается путем использования сигнала блока 20 и подачи его на блок 22 деления. В параллельной ветви получается средне-квадратичное значение сигнала напряжения на воздушном зазоре EI, вычисляемое в блоке 21, которое подается на блок 22 деления. На выходе процессора получается требуемый сигнал /1 - real, который равен /icos0. Заданная величина активного тока статора /1 - real пропорциональна вращающему моменту и устанавливается вручную или автоматически кар регулируемая переменная, например путем использования потенциометра в качестве задатчика 12 момента, на который подается напряжение V. Блок 11 суммирования предназначен для сравнения измеряемого активного тока статора в зависимости от сигнала напряжения в воздушном зазоре /1 - real и регулирующего сигнала активного тока статора /i - real. Сформированный сигнал отклонения воздействует на регулятор 10 частоты скольжения, воздействуя с целью получения на выходе сигнала частоты скольжения /slipРегулятор 10 частоты скольжения выполнен пропорционально-интегральным так, что отклонение активного тока статора управляет частотой скольжения, которая изменяется так, чтобы сохранить постоянную мощность в зазоре. Выходной сигнал регулятора 10 частоты скольжения fsiip и сигнала частоты ротора fr суммируется и образует регулирующий сигнал /mv, который подается на преобразователь 3 с импульсной модуляцией и определяет рабочую частоту преобразователя и частоту питания двигателя. В регуляторе 7 магнитный поток формируется из сигнала датчика 8 электродвижущей силы в воздушном зазоре. С этой целью сигнал датчика 8 подается на датчик 13 потока, имеющий возможность интегрирова1;ь напряжение на зазоре и умножать на постоянную величину для выдачи сигнала мгновенного потока OmstЧтобы получить сигнал действительно измеряемого потока в зазоре Фмакс сигнал мгновенного потока пропускается через выпрямитель 14 и пиковый детектор. Заданная величина максимального номинального магнитного потока двигателя или любая другая необходимая величина максимального потока устанавливается посредством потенциометра, используемого в качестве задатчика 16 магнитного потока, и заданный сигнал потока в зазоре Фмакс и измеряемый сигнал потока в зазоре Фмакс подается на третий блок 15 суммирования. Сигнал отклонения потока, образованный суммирующим блоком, подается на усилитель 17 для снижения установившегося отклонения до нуля. Выходной сигнал усилителя 17 является сигналом, регулирующим отношение вольт/герц, который затем подается на умножитель 18, где он умножает на регулирующий сигнал /inv в цепи регулирования частоты, представляющей заданную величину рабочей частоты преобразователя. Соответственно регулирующий сигнал Fmv, образуемый умножителем 18, определяет амплитуду выходного напряжения преобразователя 3 с импульсной модуляцией, и, следовательно, амплитуду переменного напряжения возбуждения, подаваемого преобразователем на обмотки статора двигателя. Использование умножителя 18 в качестве соединения между цепью регулирования частоты и цепью регулирования величины напряжения позволяет при увеличении или уменьшении активной составляющей тока статора вызывать соответствующее увеличение или уменьшение амплитуды напряжения статора, что приводит к получению регулируемого потока в зазоре для асинхронного двигателя. Оба регулирующих сигнала /mv и Vinv являются сигналами постоянного тока, чья величина определяет рабочую частоту и величину выходного напряжения преобразователя 3. Таким образом, в системе привода с асинхронным двигателем достигается точное регулирование вращающего момента независимо от изменения сопротивления ротора и других характеристик двигателя. Формула изобретения 1. Устройство для управления асинхронн.ым электродвигателем с постоянным вращающим моментом, содержащее преобразователь частоты и напряжения, выход которого подключен к асинхронному электродвигателю с короткозамкнутым ротором, датчик частоты вращения ротора, датчик мгновенного значения тока статора, регулятор скольжения, выход которого соединен с одним входом первого блока суммирования, к второму входу которого подключен выход датчика частоты вращения ротора, а выход блока суммирования соединен с входом блока регулирования частоты преобразователя, регулятор магнитного потока, подключенный к входу блока регулирования напряжения преобразователя и задатчик магнитного потока, отличающееся тем, что, с целью повышения точности, введены датчик ЭДС, соединенный с входом регулятора магнитного потока, и процессор тока статора, составленный из блока вычисления мгновенного значения мощности, блока вычисления среднего значения мощности, блока вычисления средне-квадратичного значения ЭДС и блока деления, причем входы блока вычисления мгновенного . значения мощности соединены с датчиком ЭДС и датчиком тока статора соответственно, а выход - с блоком вычисления среднего значения мощности, вход блока вычисления .средне-квадратичного значения ЭДС соединен с датчиком ЭДС, а выход - с первым входом блока деления, второй вход которого соединен с блоком вычисления среднего значения мощности, выход которого подключен к входу регулятора скольжения.
2. Устройство п. 1, отличающееся тем, что оно дополнительно снабжено вторым блоком суммирования, входы которого соединены с задатчиком момента и выходом блока вычисления среднего значения мощности, а выход - с регулятором скольжекия.
3. Устройство по п. 1, отлича.ющееся тем, что оно дополнительно снабжено третьим блоком суммирования, выпрямителем, усилителем и блоком умножения, причем выход регулятора магнитного потока через выпрямитель связан с одним входом третьего блока суммирования, к второму входу которого подключен задатчик магнитного потока, а выход третьего блока суммирования через усилитель подключен к первому входу блока умножения, второй вход которого соединен с выходом первого блока суммирования.
Источники информации, принятые во внимание при экспертизе
1.Сандлер А. С., Сарбатов Р. С. Автоматическое частотное управление асинхронными двигателями. - М.: Энергия, 1974.
2.Заявка ФРГ № 1463344, кл. 21с 59/10, 25.04.69.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1977 |
|
SU1371513A3 |
| Устройство для регулирования асинхронного двигателя | 1983 |
|
SU1202006A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЦИФРОВЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ | 2013 |
|
RU2543970C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод | 1991 |
|
SU1837379A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| УСТРОЙСТВО ПЛАВНОГО ПУСКА АСИНХРОННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2369002C2 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
