Группа изобретений относится к электротехнике, а именно к косвенным способам измерения характеристик асинхронных двигателей (линейного и вращательного исполнений) при заторможенной подвижной части, и может найти применение при испытаниях асинхронных машин малой и средней мощности.
Известен способ косвенного измерения механической характеристики асинхронного электродвигателя, в котором асинхронный двигатель в режиме короткого замыкания питают от преобразователя частоты с регулируемым напряжением, при этом измерение тягового усилия или момента производят при напряжении, пропорциональном частоте питания, а скольжение находят как отношение частоты питания к номинальной частоте [1]. К причинам, препятствующим достижению указанного ниже технического результата при использовании известного способа, относят то, что в известном способе при определении величины питающего напряжения не учитывается активное сопротивление обмотки статора, которое может быть соизмеримым с индуктивным сопротивлением, что снижает точность определения характеристик.
Известно устройство для реализации способа косвенного измерения механической характеристики асинхронного электродвигателя, включающее преобразователь частоты с независимым регулированием частоты и напряжения и подключенный к обмоткам испытуемого двигателя, ротор которого соединен через датчик силы с основанием, а также измерительные приборы [2]. К причинам, препятствующим достижению указанного ниже технического результата, при использовании известного устройства, относят то, что в известном устройстве отсутствуют элементы, позволяющие учесть влияние активного сопротивления обмоток статора на характеристики двигателя, что снижает точность получения характеристик.
Наиболее близким способом того же назначения к заявленному способу в группе изобретений по совокупности признаков является способ определения характеристик асинхронного двигателя, включающий воздействие при заторможенном роторе на обмотку статора переменным напряжением питания с частотой, изменяющейся от нуля до номинального значения, определение для каждой частоты скольжения как отношения испытательной частоты fi к номинальной частоте fн, определение расчетного напряжения без учета влияния активного сопротивления обмотки статора по формуле
Up = (fi/fн),
где Uн - номинальное напряжение и измерение силы или момента и тока [3]. Указанный способ принимаем за прототип.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного способа, принятого за прототип, относят то, что в известном способе для учета влияния активного сопротивления обмотки статора предусмотрено два этапа, на первом этапе проводят опыт при напряжении без учета влияния активного сопротивления обмотки статора, т.е. при постоянном отношении напряжения к частоте, а второй опыт проводят при уточненном значении напряжения с учетом влияния сопротивления статора, при этом предполагается, что параметры двигателя при первом и втором опытах остаются неизменными, т. е. угол φ не меняется. Однако это справедливо только для двигателей с ненасыщенной магнитной системой, например для линейных асинхронных двигателей с большим воздушным зазором. Для нормальных двигателей с насыщенной магнитной системой и особенно с массивным ротором, параметры которого сильно изменяются от величины питающего напряжения, использование известного способа приведет к снижению точности определения характеристик двигателя, особенно в области малых скольжений, когда напряжение питания во втором опыте на 40-50% превышает напряжение первого опыта.
Наиболее близким устройством того же назначения к заявленному устройству в группе изобретений по совокупности признаков является устройство для реализации способа определения характеристик линейных асинхронных двигателей, включающее преобразователь частоты с независимой регулировкой напряжения и частоты, соединенный с обмотками испытуемого двигателя, ротор которого соединен через датчик силы с основанием, а в цепь обмоток статора подключены приборы для измерения фазного тока, частоты и активного сопротивления обмотки [4]. Указанное устройство принимаем за прототип.
К причинам препятствующим достижению указанного ниже технического результата при использовании известного устройства, принятого за прототип, относится то, что в известном устройстве не предусмотрены элементы для регистрации напряжения без учета влияния активного сопротивления обмотки статора, которое является опорным для получения реального значения питающего напряжения, обеспечивающего идентичность характеристик двигателя в рабочем и неподвижном режимах.
Сущность изобретения заключается в совершенствовании способов испытания асинхронных двигателей без нагрузочных машин, т.е. в неподвижном состоянии. Технический результат - повышение точности определения характеристик.
Указанный единый технический результат при осуществлении группы изобретений по объекту - способу достигается тем, что в известном способе определения характеристик асинхронного двигателя, включающем воздействие при заторможенном роторе на обмотку статора переменным напряжением питания с частотой, изменяющейся от нуля до номинального значения, определение для каждой частоты скольжения как отношения испытательной частоты fi к номинальной частоте fн, определение расчетного напряжения без учета влияния активного сопротивления обмотки статора по формуле
Up = (fi/fн)Uн,
где Uн - номинальное напряжение,
и измерение силы или момента и тока, особенность заключается в том, что при каждой частоте fi по формуле Ut = Ui-Ir(1-fi/fн) определяют текущее значение напряжения без учета влияния активного сопротивления обмотки статора, где Ui - текущее значение питания, I - ток статора, r - активное сопротивление обмотки статора, и изменяют напряжение питания Ui до тех пор, пока текущее значение Ut не станет равным расчетному напряжению Up.
Между совокупностью признаков, перечисленных выше, и техническим результатом имеется причинно-следственная связь, которая заключается в том, что повышение точности определения характеристик асинхронного двигателя достигается предлагаемой последовательностью действий, включающей признаки ограничительной части формулы изобретения и отличительной, отражающей признаки определения опорного, расчетного напряжения без учета активного сопротивления статора и зависимого от этого признака изменения напряжения питания. Таким образом, все приведенные в формуле изобретения признаки являются необходимыми и достаточными для достижения технического результата, поэтому являются существенными признаками.
Указанный единый технический результат при осуществлении группы изобретений по объекту - устройству достигается тем, что в известном устройстве для определения характеристик асинхронного двигателя, содержащем преобразователь частоты с независимой регулировкой напряжения и частоты, соединенный с обмотками испытуемого двигателя, ротор которого соединен через датчик силы с основанием, а в цепь обмоток статора подключены приборы для измерения фазного тока, частоты и активного сопротивления обмотки, особенность устройства заключается в том, что, по крайней мере, в одну из фазных обмоток статора включен шунт, первый из зажимов которого соединен с зажимом сети, а второй зажим соединен с началом фазной обмотки, между зажимом сети и нулевым проводом подключен потенциометр, а между вторым зажимом шунта и зажимом подвижного элемента потенциометра подключен прибор для измерения напряжения.
Между совокупностью признаков, перечисленных выше, и техническим результатом имеется причинно-следственная связь, которая заключается в том, что повышение точности определения характеристик асинхронного двигателя достигается введением в известную группу признаков дополнительных признаков, обеспечивающих регистрацию опорного, расчетного напряжения без учета активного сопротивления обмотки статора, необходимого для точного обеспечения идентичности характеристик в рабочем режиме и в режиме испытаний, т.е. все приведенные в формуле изобретения признаки являются существенными.
Заявленная группа изобретений соответствует требованию единства изобретения, поскольку группа разнообъектных изобретений образует единый изобретательский замысел, причем один из заявленных объектов группы - устройство для определения характеристик асинхронного двигателя предназначено для осуществления другого заявленного объекта группы - способа определения характеристик асинхронного двигателя. При этом оба объекта группы изобретений направлены на решение одной и той же задачи с получением единого технического результата - повышение точности измерения характеристик.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленной группы изобретений как для объекта - устройства, так и для объекта - способа, позволил установить, что заявитель не обнаружил аналоги как для способа, так и для устройства заявленной группы, характеризующиеся признаками, тождественными всем существенным признакам как способа, так и устройства заявленной группы изобретений. Определение из перечня выявленных аналогов - прототипов как для способа, так и для устройства - как наиболее близких по совокупности признаков аналогов, позволило выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков для каждого из заявленных объектов группы, изложенных в формуле изобретения. Следовательно, каждый из объектов группы изобретений соответствует условию "новизна". Для проверки соответствия каждого объекта заявленной группы изобретений условию "изобретательский уровень" заявитель провел дополнительный поиск известных решений с целью выявить признаки, совпадающие с отличительными от выбранных прототипов признаками для каждого объекта заявленной группы изобретений.
Результаты поиска показали, что каждый объект заявленной группы изобретений не вытекает для специалиста явным образом из известного уровня техники, поскольку из уровня техники, определенного заявителем, не выявлено влияние предусматриваемых существенными признаками каждого из объектов заявленной группы изобретений преобразований на достижение технического результата, в частности, в каждом из объектов заявленной группы изобретений не предусматриваются следующие преобразования:
дополнение известного средства какой-либо известной частью (частями), присоединяемой (присоединяемыми) к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
замена какой-либо (частей) известного средства другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такой замены;
исключение какой-либо части (элемента, действия) средства с одновременным исключением обусловленной ее наличием функции и достижением при этом обычного для такого результата (упрощение, уменьшение массы, габаритов, материалоемкости, повышение надежности, сокращение продолжительности процесса и пр.);
увеличение количества однотипных элементов, действий для усиления технического результата, обусловленного наличием в средстве именно таких элементов, действий;
выполнение известного средства или его части (частей) из известного материала для достижения технического результата, обусловленного известными свойствами этого материала;
создание средства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил, рекомендаций, и достигаемый при этом технический результат обусловлен только известными свойствами частей этого средства и связей между ними.
Описываемая группа изобретений не основана на изменении количественного признака (признаков), представлении таких признаков во взаимосвязи либо изменении его вида. Имеется в виду случай, когда известен факт влияния каждого из указанных признаков на технический результат, и новые значения этих признаков или их взаимосвязь могли быть получены исходя из известных зависимостей, закономерностей. Следовательно, каждый из объектов заявленной группы изобретений соответствует условию "изобретательский уровень".
На чертежах представлено устройство в заявленной группе изобретений, где на фиг. 1 изображена векторная диаграмма асинхронного двигателя в двух режимах, а на фиг. 2 принципиальная схема испытаний.
Сведения, подтверждающие возможность осуществления каждого объекта заявленной группы изобретений с получением указанного технического результата по объекту - способу определения характеристик асинхронного двигателя включает следующую последовательность действий. На обмотку статора асинхронного двигателя подают от преобразователя частоты переменное напряжение питания. Ротор при этом заторможен. В процессе опытов меняют частоту питания от нуля до номинального значения и на каждой ступени частоты fi определяют скольжение в рабочем режиме как отношение испытательной частоты fi к номинальной частоте fн, кроме того на каждой ступени частоты fi определяют расчетное напряжение без учета активного сопротивления обмотки статора по формуле
Up = (fi/fн)Uн,
где Uн - номинальное напряжение.
Затем при произвольной величине питания Ui по формуле Ut = Ui -Ir (1- (fi/fн)) определяют текущее значение напряжения без учета активного сопротивления обмотки статора, здесь I - ток статора, r - активное сопротивление обмотки статора.
Затем сравнивают расчетное Up и текущее значение напряжения Ut и изменяют напряжение питания Ui до тех пор, пока Ut не достигнет величины Up. После этого измеряют силу или момент, приложенный к ротору асинхронного двигателя, и ток статора.
Меняя частоту питания fi и проводя аналогичные опыты, можно получить зависимости силы или момента и тока во всем диапазоне скольжений от 0 до 1. При необходимости можно расчетным путем по известным формулам получить все другие характеристики двигателя (n, cos(f), g...).
Для обоснования объективности предложенного способа определения характеристик асинхронного двигателя в рабочем режиме и в заторможенном режиме испытаний являются:
равенство частоты наводимых в роторе токов в двух режимах, что обеспечивается понижением частоты питающей сети во время проведения опыта;
равенство магнитных потоков в двух режимах, что обеспечивается правильным выбором величины питающего напряжения во время опыта.
В случае выполнения этих двух условий векторную диаграмму асинхронного двигателя в режиме испытания на пониженной частоте можно представить в виде указанной на фиг. 1, где в дополнение к ранее указанным обозначениям: x - индуктивное сопротивление рассеяния обмотки статора в номинальном режиме, Eн - ЭДС двигателя в номинальном режиме. Учитывая, что магнитный поток в номинальном рабочем режиме и режиме испытаний один и тот же, ЭДС и индуктивное сопротивление x уменьшается пропорционально частоте. Однако величина активного сопротивления r не зависит ни от частоты, ни от потока, поэтому на низких частотах его влияние увеличивается. Общую величину активного сопротивления можно разделить на два сопротивления:
r = r (fi/fн) + r (1 - (f1/fн)),
где первая составляющая, как и все другие параметры двигателя, изменяется пропорционально частоте и, следовательно, не влияет на величину магнитного потока. Величина напряжения без влияния активного сопротивления статора и является расчетным напряжением Up, которое изменяется от частоты по известному пропорциональному закону и при известных значениях номинального напряжения и частоты имеет конкретную величину, поэтому эту величину и предлагается взять в качестве критерия выполнения указанных выше двух условий идентичности характеристик двигателя в двух режимах.
Вторая составляющая активного сопротивления и вызывает необходимость повышения напряжения питания во время проведения опытов на пониженных частотах. Из векторной диаграммы фиг. 1 видно, что связь между заданным расчетным напряжением Up и напряжением питания с учетом влияния активного сопротивления статора определяется формулой
Up = Ui - Ir (1 - (fi/fн)).
Таким образом, изменяя напряжение питания Ui и определяя при этом разность векторов U1 и Ir (1 -(fi/fн)), можно получить режим, когда эта разность станет равной расчетной заданной величине Up, при этом характеристики двигателя будут идентичными характеристикам в рабочем режиме.
Определение разности векторов напряжений можно проводить графическим методом, расчетом на ЦВМ или непосредственно измеряя эту разность с помощью аналогового устройства. Последний вариант, как наиболее целесообразный, и предлагается для реализации способа.
По объекту - устройству заявляемое согласно формуле изобретение содержит испытуемый трехфазный асинхронный двигатель с обмотками статора 1, 2, 3 с нулевым проводом, которые посредством ключа 4 подключены к преобразователю частоты, выполненному, например, в виде синхронного генератора, содержащего на статоре трехфазную обмотку 5, 6, 7 и ротор 8, обмотка возбуждения которого подсоединена к источнику постоянного тока через регулировочный реостат 9. Ротор асинхронного двигателя 10 соединен через рычаг 11 и датчик силы (динамометр) 12 с неподвижным основанием. Нейтральные точки синхронного генератора и асинхронного двигателя соединены нулевым проводом 13.
В цепь фазной обмотки двигателя 1 подключены амперметр 14 и омметр 15, последний имеет возможность подсоединяться параллельно любой обмотке посредством щупов 16. Параллельно фазным обмоткам двигателя 1 и 3 подключен частотомер 17. В цепь фазной обмотки 1 включен последовательно шунт 18, первый из зажимов которого 19 подключен к зажиму сетевой фазной обмотки генератора 7, а второй зажим 20 соединен через амперметр 14 с началом фазной обмотки двигателя 1, между зажимом 19 и нулевым проводом 13 подключен делитель напряжения - потенциометр 21, а между вторым зажимом шунта 20 и подвижным элементом потенциометра 22 подключен вольтметр 23.
Работает устройство следующим образом.
Предварительно ключом 4 подключают обмотки двигателя 1, 2, 3 к обмоткам генератора 5, 6, 7 и доводят температуру двигателя до рабочей. Отключают ключом 4 генератор от двигателя и щупами 16 подключают омметр 15 и производят замер активного сопротивления г, например, фазной обмотки 1. В дальнейшем этот процесс регулярно повторяют с целью поддержания величины r постоянной.
Далее определяют кратность величины активного сопротивления обмотки статора и сопротивления шунта 18 - Rш по формуле
K = Rш/r(1-(fi/fн))
и определяют сопротивление участка потенциометра между зажимами 19 и 22 по формуле
rk = К • rn,
где rn - полное сопротивление потенциометра.
С помощью омметра 15 устанавливают подвижный элемент потенциометра 22 в расчетное положение.
Задаются первой испытательной частотой fi и определяют расчетное напряжение без учета влияния активного сопротивления обмотки статора по формуле
Up = К (fi/fн)Uн,
где Uн и fн- номинальное напряжение и частота,
и скольжение по формуле
S = f i/fн.
Ключом 4 подключают обмотки двигателя к генератору и по показанию частотомера 17 изменением частоты вращения ротора 8 устанавливают заданную частоту fi. Изменяют ток возбуждения синхронного генератора путем изменения сопротивления 9 до тех пор, пока показания вольтметра 23 не достигнут величины расчетного напряжения без учета влияния активного сопротивления обмотки статора Up, после чего производят динамометром 12 замер силы и с учетом величины рычага определяют момент (для линейного асинхронного двигателя достаточно определения силы), а также производят замер тока по показанию амперметра 14. Проводят аналогичные испытания при других частотах fi.
Предложенное устройство позволяет аналоговым путем, без расчетов реализовать векторную зависимость между напряжением питания Ui и расчетным напряжением Up, а треугольник напряжений между точками 19, 20 и 22 в соответствующем масштабе - k, точно соответствует уравнению
Up =Ui-Ir(1-(fi/fн)),
т.к. напряжение на участке потенциометра 21 между зажимами 19 и 22 совпадает по фазе с питающим фазным напряжением Ui, но по величине отличается в k раз. Напряжение на шунте 18 совпадает с направлением тока в обмотке двигателя 1 и равно произведению величины тока на сопротивление шунта Rш, которое отличается от r (1 - (fi/fн) тоже в k раз, следовательно, и результирующий вектор Up будет отличаться в k раз, и показания вольтметра 23 могут являться критерием для доказательства идентичности получаемых характеристик в неподвижном и рабочем режимах двигателя.
В качестве примера рассмотрим определение характеристик встроенного дискового асинхронного двигателя с массивным ротором.
Исходные данные, необходимые для определения характеристик:
номинальное напряжение, Uн = 220 В
номинальная частота, fn = 50 Гц
активное сопротивление обмотки статора, r = 65 Ом.
Определим момент и ток двигателя в заторможенном режиме при частоте питания fi=25 Гц.
С целью исключения влияния сопротивления шунта на характеристики двигателя берем стандартный шунт 18 сопротивлением 0,5 Ом. Потенциометр 21 на 220 В сопротивлением 5 кОм.
Рассчитываем кратность сопротивления шунта:
k - Rш/r(1-(fi/fн)) = 0.5/65(1-(25/50)) = 0.015
Определяем величину сопротивления участка потенциометра между зажимами 19 и 22:
rk = k • rn = 0,0154 • 5000 = 77 0м
Устанавливаем движок потенциометра, используя омметр 15, в заданное положение. Определяем расчетное напряжение без учета влияния активного сопротивления обмотки статора:
Up - k (fi/fн)Uн = 0,0154 (25/50) 220 = 1,694
Подаем произвольную величину напряжения питания Ui и по вольтметру 23 регистрируем текущее значение напряжения Ut, изменяем реостатом 9 напряжение питания до тех пор, пока вольтметр не покажет расчетного значения 1,694 В, а после этого измеряем силу, умножаем ее на величину плеча рычага 11 и получаем момент и измеряем ток.
Таким образом, в предложенном изобретении, в отличие от прототипов, производится непосредственное измерение контрольного параметра (напряжение без учета активного сопротивления), которое может быть определено заранее, расчетным путем, при этом учитывается реальное насыщение магнитной цепи и реальные значения параметров ротора, а следовательно, точность получаемых характеристик будет определяться только точностью (классом точности) измерительных приборов.
Таким образом, изложенные сведения показывают, что при использовании заявленной группы изобретений выполнена следующая совокупность условий:
средство, воплощающее заявленное изобретение при его осуществлении, предназначено для использования в промышленности, а именно в электротехнике.
для заявленной группы изобретений в том виде, как она охарактеризована в независимых пунктах изложенной формулы изобретения, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов.
Следовательно, заявленная группа изобретений соответствует условию "промышленная применимость".
Литература
1. Петленко Б. И. Определение механических характеристик линейных асинхронных двигателей. - Электротехника, 1979, N 3, с. 23.
2. Авторское свидетельство СССР N 619996, кл. Н 02 К 15/00, G 01 L 3/00,1978.
3. Петленко Б. И. , Баймуханов Ж.С. Измерение характеристик линейных электродвигателей по статическим режимам. - Известия АН СССР "Энергетика и транспорт", 1983, N 1, с. 167- 168.
4. Авторское свидетельство СССР N 1539697, кл. G 01 R 31/34, 1990.

Изобретение предназначено для проведения испытаний асинхронных машин малой и средней мощности. Технический результат - повышение точности определения характеристик. Предлагается определять характеристики асинхронного двигателя при заторможенном роторе и питании обмоток статора от источника переменной частоты и напряжения, определять расчетное напряжение без учета влияния активного сопротивления обмоток статора, в процессе опыта измерять текущее значение этого напряжения и изменять величину питающего напряжения до тех пор, пока текущее и расчетное значения не совпадут. После этого измерять силу или момент и ток. Предлагается устройство для реализации этого способа, окованное на схемном измерении величины напряжения без учета влияния активного сопротивления обмотки статора с помощью дополнительно введенных в схему шунта и потенциометра. 2 с.п. ф-лы, 2 ил.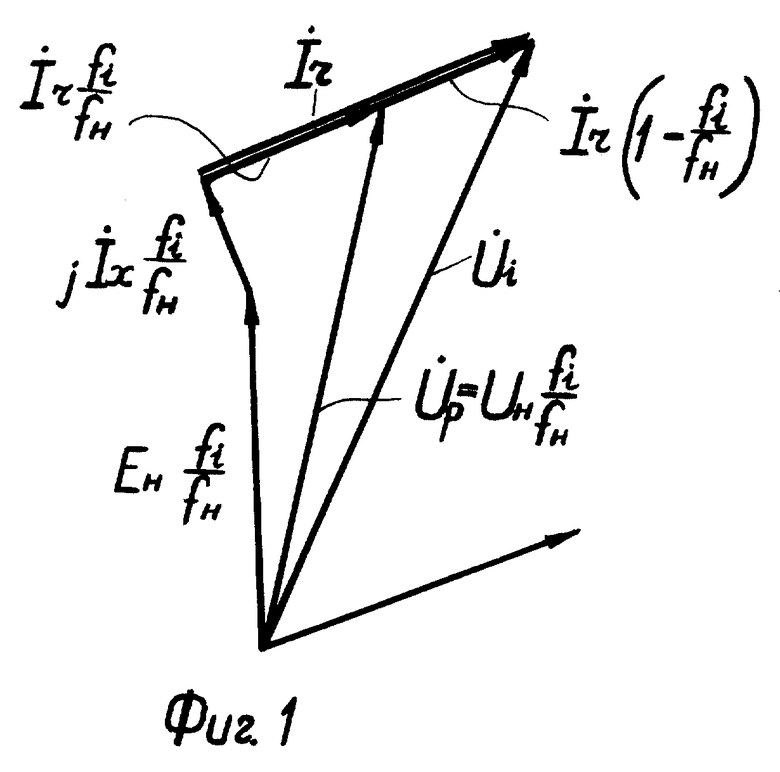
Up = (fi/fн)Uн,
где Uн - номинальное напряжение,
и измерение силы или момента и тока, отличающийся тем, что при каждой частоте fi по формуле Uт = Ui - Ir(1-fi/fн) определяют текущее значение напряжения без учета влияния активного сопротивления обмотки статора, где Ui - текущее напряжение питания, I - ток статора, r - активное сопротивление обмотки статора, и изменяют напряжение питания Ui до тех пор, пока текущее значение напряжения Uт не станет равным расчетному напряжению Up.
| Способ косвенного определения механической характеристики асинхронного электродвигателя | 1987 |
|
SU1539697A1 |
| Способ определения характеристик линейных асинхронных двигателей и устройство для его осуществления | 1990 |
|
SU1817048A1 |
| Устройство для снятия механической характеристики линейного электродвигателя | 1981 |
|
SU954905A2 |
| Способ определения рабочих характеристик линейного асинхронного электродвигателя | 1983 |
|
SU1176272A2 |
| DE 3421438 A1, 12.12.85. | |||
