(54) ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещения в код | 1982 |
|
SU1030824A1 |
| Преобразователь перемещения в код | 1988 |
|
SU1654973A1 |
| Преобразователь перемещения в код | 1988 |
|
SU1571762A1 |
| Преобразователь перемещения в код | 1978 |
|
SU746651A1 |
| Преобразователь перемещения в код | 1985 |
|
SU1248069A2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| Устройство для преобразования перемещение-код-фаза | 1986 |
|
SU1349003A2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
| Устройство для управления многоканальным электроприводом тренажера | 1984 |
|
SU1180846A1 |
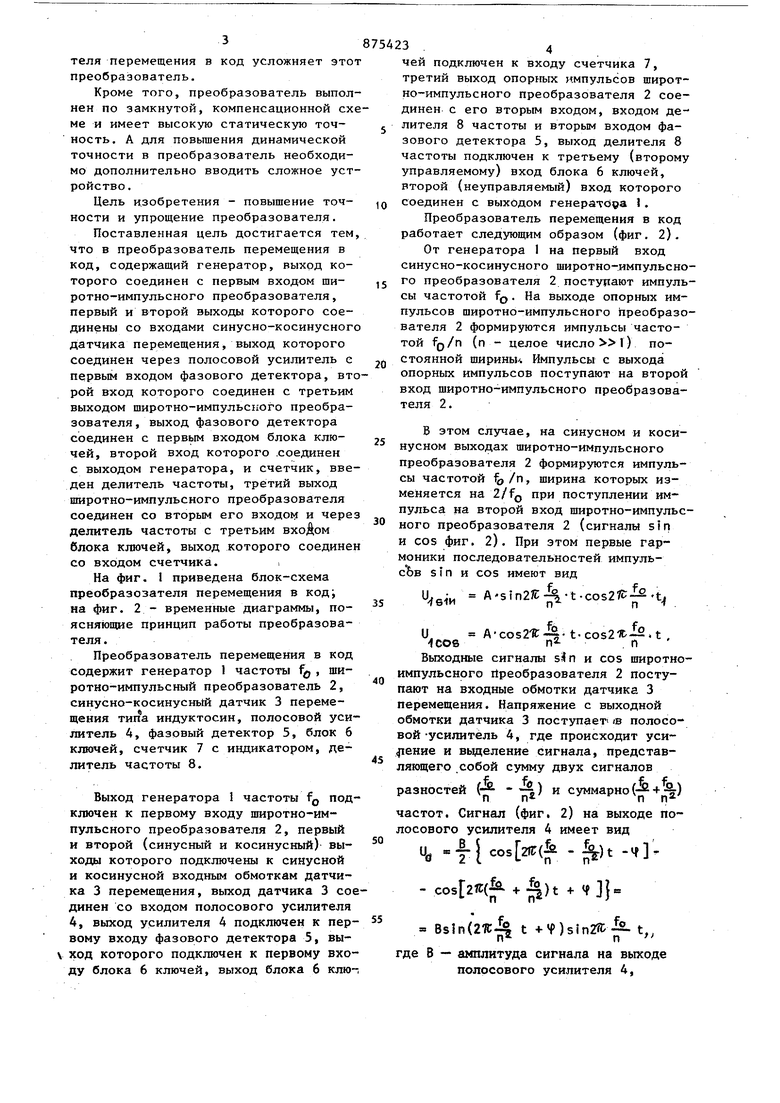
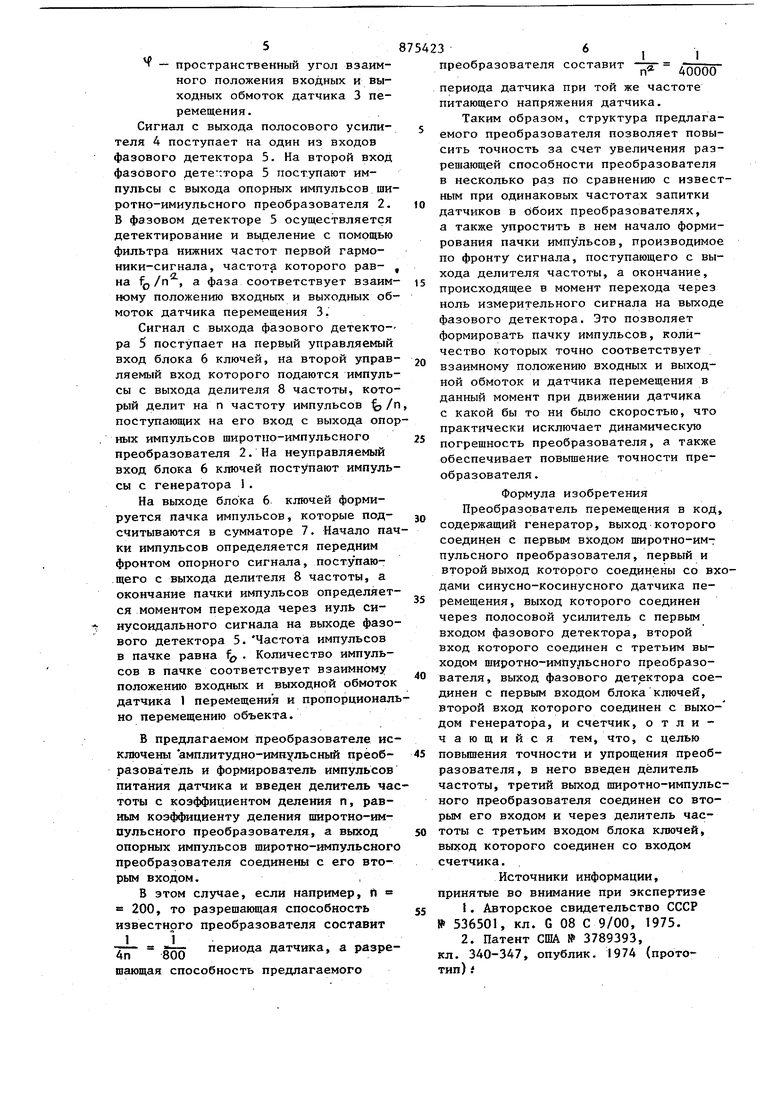
Изобретение относится к автоматике и измерительной технике и может найти применение для измерения перемещения рабочих органов металлорежущих станков и измерительных машин . Известен преобразователь перенеще иия в код, содержащий синусно-косинусный широтно-импульс ялй преобразователь, выходные сигналы которого ли нейно изменяются по длительности в функции числа, пропорционального iesa имному положению входных и выходных обмоток датчика L J Недостатком преобразователя является иевысокаяТочность. Известен преобразователь перемещения в код, содержащий генератор, синусно-косииусный широтно-импульсны преобразователь, имеющий два входи, первый из которых подключен к генератору, выходы синусный, косинусный и onopribix импульсов, синусно-косинус иый амплитудно-импульсный преобразователь, синусный и косинусный вйсоды пшротно-импульсного и амплитудно-импульсного преобразователей через формирователь импульсов питания подключеиы к двум входным обмоткам датчика перемещения типа-индуктосин, выход датчика перемещения подключен через полосовой усилитель к первому входу фазового детектора, выход которого подключен к управляему входу блока, ключей. Выход блока ключей подключен к второму входу широтно-импульсного преобразователя и к входу амплитудноимпульсного преобразователя. Выход опорных импульсов щиротно-импульсного преобразователя подключен к второму входу фазового детектора и к неуправляемому входу блока ключей, выходы амплитудно-импульсного и широтио-импульсного преобразователей соединены с выходами блока индикации ,2 J. Однако введение синусно-косинусного амплитудно-импульсного преобразователя для увеличения разрешающей способности известного преобразователя перемещения в код усложняет это преобразователь. Кроме того, преобразователь выпол нен по замкнутой, компенсационной сх ме и имеет высокую статическую точность. А для повышения динамической точности в преобразователь необходимо дополнительно вводить сложное уст ройство . Цель изобретения - повышение точности и упрощение преобразователя. Поставленная цель достигается тем что в преобразователь перемещения в код, содержащий генератор, выход которого соединен с первым входом широтно-импульсного преобразователя, первый и второй выходы которого соединены со входами синусно-косинусног датчика перемещения, выход которого соединен через полосовой усилитель с первым входом фазового детектора, вт рой вход которого соединен с третьим выходом широтно-импульсного преобразователя , выход фазового детектора соединен с первь1м входом блока ключей, второй вход которого .соединен с выходом генератора, и счетчик, вве ден делитель частоты, третий выход широтно-импульсного преобразователя соединен со вторым его входом и чере делитель частоты с третьим вхоДом блока ключей, выход которого соедине со входом счетчика. На фиг. I приведена блок-схема преобразователя перемещения в код; на фиг. 2 - временные диаграммы, поясняющие принцип работы преобразователя. Преобразователь перемещения в код содержит генератор 1 частоты i , широтио-импульсный преобразователь 2, синусно-косинуснь1й датчик 3 перемещения типа индуктосин, полосовой уси литель 4, фазовый детектор 5, блок 6 ключей, счетчик 7 с индикатором, делитель частоты 8. Выход генератора 1 частоты f под ключен к первому входу широтно-импульсного преобразователя 2, первый и второй (синусный и косинусный) выходы которого подключены к синусной и косинусной входным обмоткам датчика 3 перемещения, выход датчика 3 со динен со входом полосового усилителя 4, выход усилителя А подключен к пер вому входу фазового детектора 5, выV ход которого подключен к первому вхо ду блока 6 ключей, выход блока 6 клю 34 чей подключен к входу счетчика 7, третий выход опорных импульсов широтно-импульсного преобразователя 2 соединен с его вторым входом, входом делителя 8 частоты и вторым входом фазового детектора 5, выход делителя 8 частоты подключен к третьему (второму управляемому) вход блока 6 ключей, второй (неуправляемый) вход которого соединен с выходом генератора 1. Преобразователь перемещения в код работает следующим образом (фиг. 2). От генератора 1 на первый вход синусно-косинусного широтно-импульсного преобразователя 2 поступают импульсы частотой ff). На выходе опорных импульсов широтно-импульсного преобразователя 2 формируются импульсы частотой fQ/n (п - целое число) постоянной шириныл Импульсы с выхода опорных импульсов поступают на второй вход широтно-импульсного преобразователя 2. В этом случае, на синусном и косинусном выходах широтно-импульсного преобразователя 2 формируются импульсы частотой /п, ширина которых изменяется на 2/fQ при поступлении импульса на второй вход щиротно-импульсного преобразователя 2 (сигналы sin и cos фиг. 2). При этом первые гармоники последовательностей импульсЬв sin и cos имеют вид A«sfn2 Z;.t.cos27 :l2.t Acos21t -t.cos2H -.t ri Выходные сигналы sJn и cos широтноимпульсного Преобразователя 2 поступают на входные обмотки датчика 3 перемещения. Напряжение с выходной обмотки датчика 3 поступает IB полосовой-усилитель 4, где происходит усирение и вьщеление сигнала, представляющего собой сумму двух сигналов разностей ( в) и суммарно(- ) п п частот. Сигнал (фиг. 2) на выходе полосового усилителя 4 имеет вид и, ,( -) - ( 4.)t 4. Bsln(21C t 4-4)sin27&- t., n де В - амплитуда сигнала на выходе полосового усилителя 4, т - пространственный угол взаимного положения входных и выходных обмоток датчика 3 перемещения. Сигнал с выхода полосового усилителя 4 поступает на один из входов фазового детектора 5. На второй вход фазового дете-:тора 5 поступают импульсы с выхода опорных импульсов ши ротно-имиульсного преобразователя 2. В фазовом детекторе 5 осуществляется детектирование и выделение с помощью фильтра нижних частот первой гармоники-сигнала, частота которого равна /п , а фаза соответствует взаим ному положению входных и выходных об моток датчика перемещения 3. Сигнал с выхода фазового детектора 5 поступает на первый управляемый вход блока 6 ключей, на второй управ ляемый вход которого подаются импуль сы с выхода делителя 8 частоты, кото рый делит на п частоту импульсов поступающих на его вход с выхода опо ных импульсов широтпо-импульсного преобразователя 2. На неуправляемый вход блока 6 ключей поступают импуль сы с генератора 1. На выходе блока 6 ключей формируется пачка импульсов, которые подсчитываются в сумматоре 7. Начало пач ки импульсов определяется передним фронтом опорного сигнала, поступаю.щего с выхода делителя 8 частоты, а окончание пачки импульсов определяет ся моментом перехода через нуль синусоидального сигнала на выходе фазо вого детектора 5. Частота импульсов в пачке равна f , Количество импульсов в пачке соответствует взаимному положению входных и выходной обмоток датчика 1 перемещения и пропорционал но перемещению объекта. В предлагаемом преобразователе ис ключены амплитудно-импульсный преобразователь и формирователь импульсов питания датчика и введен делитель час тоты с коэффициентом деления п, равным коэффициенту деления широтно-имаульсного преобразователя, а выход опорных импульсов широтно-импульсного преобразователя соединены с его вторь м входом. В этом случае, если например, п 200, то разрешающая способность известного преобразователя составит 1 1 периода датчика, а разрешающая способность предлагаемого 36 1 J преобразователя составит п 40000 периода датчика при той же частоте питающего напряжения датчика. Таким образом, структура предлагаемого преобразователя позволяет повысить точность за счет увеличения разрешающей способности преобразователя в несколько раз по сравнению с известным при одинаковых частотах запитки датчиков в Обоих преобразователях, а также упростить в нем начало формирования пачки импульсов, производимое по фронту Сигнала, поступающего с выхода делителя частоты, а окончание, происходящее в момент перехода через ноль измерительного сигнала на выходе фазового детектора. Это позволяет формировать пачку импульсов, количество которых точно соответствует взаимному положению входных и выходной обмоток и датчика перемещения в данный момент при движении датчика с какой бы то ни было скоростью, что практически исключает динамическую погрешность преобразователя, а также обеспечивает повьппение точности преобразователя. Формула изобретения Преобразователь перемещения в код, содержащий генератор, выход которого соединен с первым входом широтно-им-г пульсного преобразователя, первый и второй выход которого соединены со входами синусно-косинусного датчика перемещения, выход которого соединен через полосовой усилитель с первым входом фазового детектора, второй вход которого соединен с третьим выходом широтно-импульсного преобразователя, выход фазового детектора соединен с первым входом блока ключей, второй вход которого соединен с выходом генератора, и счетчик, отличающийся тем, что, с целью повышения точности и упрощения преобразователя, в него введен делитель частоты, третий выход широтно-импульсного преобразователя соединен со вторым его входом и через делитель частоты с третьим входом блока ключей, выход которого соединен со входом счетчика. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 536501, кл. G 08 С 9/00, 1975. 2.Патент США 3789393, кл. 340-347, опублик. 1974 (прототип) ;
