. f
Изобретение относится к автоматике и измерительной технике, может быть использовано для измерения перемещений рабочих органов металлорежущих машин и является усовершенствованием устройства по основному авт.св. № 1030824.
Целью изобрет ения является повышение точности преобразователя за счет снижения случайных погрешностей
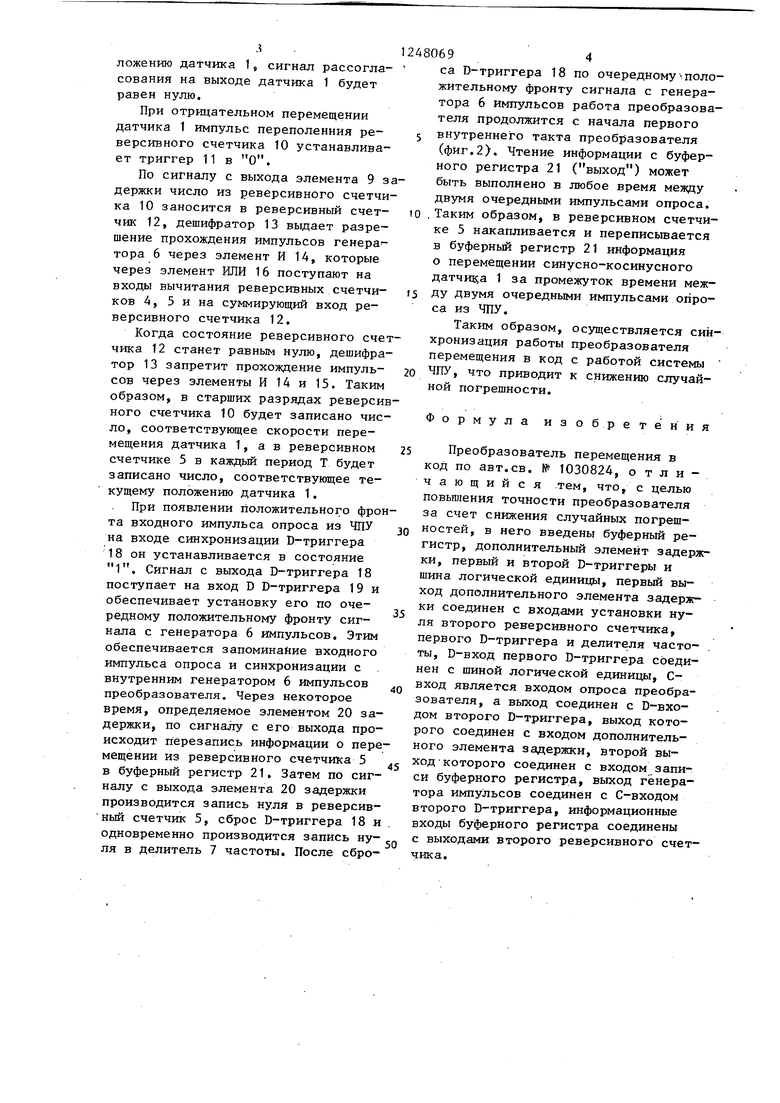
На фиг.1 представлена блок-схема преобразователя перемещений в код/ на фиг.2 - временная диаграмма, поясняющая его работу.
Преобразователь содержит синусно- косинусный датчик 1,.полосовой усилитель 2, фазочувствительный формирователь 3 импульсов, реверсивные счетчики 4 и 5, генератор 6 импульсов, делитель 7 частоты, широтно- импульсньш модулятор 8, элемент 9 задержки, реверсивный счетчик 10, триггер 11, реверсивный счетчик 12, дешифратор 13, элементы И 14, 15, элементы ИЛИ 16, 17, D-триггеры 18 и 19, дополнительный элемент 20 задержки, буферный регистр 21.
Преобразователь перемещения в код работает следующим образом.
В реверсивном счетчике 4 хранится число, пропорциональное текущему положению подвижной части синусно- косинусного датчика 1. Ширина импульсов напряжения, вырабатываемых ши- ротно-импульсным модулятором 8 и поступающих на входные синусную и косинусную обмотки датчика 1, определяется числом, записанным в реверсивном счетчике 4. Изменение этого числа вызывает изменение ширины синусного, и косинусного сигналов питания датчика 1. В статистически согласованном положении эти сигналы таковы, что на выходе датчика 1 величина напряжения близка к нулю. При этом триггер 11 находится в единичном состоянии, а реверсивные счетчики 10 и 12 в нулевом состоянии.
При перемещении подвижной части . датчика 1 на его выходе возникает сигнал рассогласования. Полосовой усилитель 2 усиливает сигнал рассогласования и выделяет первую гармонику этого сигнала. Усиленный сигнал рассогласования поступает на вход фазочувствительного формирователя 3 импульсов. Сигнал, поступающий с одного выхода элемента 9 задержки.
480692
сдвинут на 1/4 периода Т от его начала и приходится на максимум сигнала рассогласования. Если величина рассогласования больше порога срабаты5 вания фазочувствительного формирователя 3 импульсов, то по одному из выходов (в зависимости от фазы рассогласования) выдается импульс. Так, при положительном перемещении подвиж0 ной части датчика 1 возникает положительное .рассогласование и фазочувствительный формирователь 3 импульсов выдает импульсы, которые поступают через элемент ИЛИ 1 7 на реверсив15 ный счетчик 4, увеличивая хранящееся в нем число. Кроме того, эти импульсы поступают на суммирующий счетный вход реверсивного счетчика 10, увеличивая хранящееся в нем число. По
20 сигналу с другого выхода элемента 9 задержки (который сдвинут на 1/2 Т от начала периода) происходит перезапись числа из старших разрядов реверсивного счетчика 10 в реверсив25 ный счеТчик 12. Если это число не равно нулю, то дешифратор 13 вырабатывает единичный сигнал, разрешаю- щий прохождение импульсов с генератора 6 импульсов через элементы И 14
30 и 15 При единичном состоянии триггера 11. Импульсы с выхода элемента И 15 поступают через элемент ИЛИ 17 на суммирующие счетные входы реверсивных счётчиков 4 и 5. Одновременно
,, импульсы с выхода элемента И 15 поступают на вход вычитателя реверсивного счетчика 12. Когда число в реверсивном счетчике 12 станет нулевьш, дешифратор 13 запретит прохождение
4Q импульсов через элементы И 14 и 15. Если число импульсов, поступающих каждый период, соответствует величине перемещения датчика 1 за период, то на выходе датчика 1 сигнал расд согласования будет равен нулю. При уменьшении положительной скорости перемещения датчика 1 или при отрицательном перемещении возникает отрицательное рассогласование. Фазочув, ствительный формирователь 3 выдает импульсы, которые поступают на вход вычитания реверсивного счетчика 10 а через элемент ИЛИ 16 на входы вычитания реверсивных счетчиков 4 и 5.
55 Когда состояние старших разрядов реверсивного счетчика 10 станет равно нулю, а состояние реверсивного счетчика 4 будет соответствовать пол
ложению датчика 1, сигнал рассогласования на выходе датчика 1 будет равен нулю.
При отрицательном перемещении датчика 1 импульс переполенния реверсивного счетчика 10 устанавливает триггер 11 в О.
По сигналу с выхода элемента 9 з держки число из реверсивного счетчика 10 заносится в реверсивный счетчик 12, дешифратор 13 выдает разрешение прохождения импульсов генератора 6 через элемент И 14, которые через элемент ИЛИ 16 поступают на входы вычитания реверсивных счетчиков 4, 5 и на суммирующий вход реверсивного счетчика 12.
Когда состояние реверсивного сче чика 12 станет равным нулю, дешифратор 13 запретит прохождение импульсов через элементы И 14 и 15. Таким образом, в старших разрядах реверсив ного счетчика 10 будет записано число, соответствующее скорости перемещения датчика 1, а в реверсивном счетчике 5 в каждьй период Т будет записано число, соответствующее текущему положению датчика 1.
При появлении положительного фронта входного импульса опроса из ЧПУ на входе синхронизации D-триггера 18 он устанавливается в состояние 1. Сигнал с выхода D-триггера 18 поступает на вход D D-триггера 19 и обеспечивает установку его по очередному положительному фронту сигнала с генератора 6 импульсов. Этим обеспечивается запоминание входного импульса опроса и синхронизации с внутренним генератором 6 импульсов преобразователя. Через некоторое время, определяемое элементом 20 задержки, по сигналу с его выхода происходит перезапись информации о перемещении из реверсивного счетчика 5 в буферный регистр 21. Затем по сигналу с выхода элемента 20 задержки производится запись нуля в реверсив- ньй счетчик 5, сброс D-триггера 18 и одновременно производится запись нуля в делитель 7 частоты. После сбро480694
са D-триггера 18 по очередному-положительному фронту сигнала с генератора 6 импульсов работа преобразователя продолжится с начала первого 5 внутреннего такта преобразователя (фиг.2). Чтение информации с буферного регистра 21 (выход) может быть выполнено в любое время между двумя очередными импульсами опроса.
Ю , Таким образом, в реверсивном счетчике 5 накапливается и переписывается в буферный регистр 21 информация о перемещении синусно-косинусного датчиз а 1 за промежуток времени ДУ двумя очередными импульсами опроса из ЧПУ.
Таким образом, осуществляется синхронизация работы преобразователя перемещения в код с работой системы
20 ЧПУ, что приводит к снижению случайной погрешности.
Формула изобретения
25 Преобразователь перемещения в код по авт.св. № 1030824, о т л и - чающийся .тем, что, с целью повьш1ения точности преобразователя за счет снижения случайных погреш0 ностей, в него введены буферный регистр, дополнительный элемент задержки, первый и второй D-триггеры и шина логической единицы, первый выход дополнительного элемента задерж- ки соединен с входами установки нуля второго реверсивного счетчика, первого D-триггера и делителя частоты, D-вход первого D-триггера соединен с шиной логической единицы, СQ вход является входом опроса преобразователя, а выход соединен с D-BXO- дом второго D-триггера, выход которого соединен с входом дополнительного элемента задержки, второй вы- j ход которого соединен с входом записи буферного регистра, выход генератора импульсов соединен с С-входом второго D-триггера, информационные входы буферного регистра соединены с выходами второго реверсивного счет0
чика.
5ход
Вых.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещения в код | 1982 |
|
SU1030824A1 |
| Преобразователь перемещения в код | 1988 |
|
SU1654973A1 |
| Преобразователь перемещения в код | 1978 |
|
SU746651A1 |
| Преобразователь перемещения в код | 1988 |
|
SU1571762A1 |
| Преобразователь перемещения в код | 1976 |
|
SU693415A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
| Устройство для моделирования синусно-косинусного трансформаторного датчика угла | 1990 |
|
SU1778766A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU645190A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| Следящий преобразователь угла поворота вала в код | 1983 |
|
SU1116446A1 |
Изобретение относится к автоматике и измерительной технике, может быть использовано для измерения перемещений рабочих органов металлорежущих станков и является усовершенствованием изобретения по авт. св. № 1030824. Целью изобретения является повьшение точности преобразователя за счет снижения случайных погрешностей. Для этого ц преобразователь, содержащий синусно-косинусный датчик, полосовой усилитель, фазочувствитель- ный формирователь импульсов реверсивные счетчики, генера- ор импульсов, делитель частоты, широтно-импульсный модулятор, первый элемент задержки, триггер, дешифратор, элементы И и элементы ИЛИ, введены два D-триггера, дополнительный элемент задержки, буферный регистр и шина логической единицы. Повьшение точности достигается за счет того, что в преобразователе по импульсу, поступающему на С-вход первого D-триггера, с помощью второго D-триггера и дополнительного элемента задержки обеспечивается синхронизация начала формирования информации о перемещении синусно-ко- синусного датчика. 2 ил. i (Л N5 i4 00 О а ;о к
| Преобразователь перемещения в код | 1982 |
|
SU1030824A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
