Изобретение относится к подъемнотранспортным средствам и может быть использовано для измерения скорости, обеспечения контроля превышения заданной скорости и контроля аварийного снижения скорости движения сосуда, например шахтного подъемника при механическом воздействии на сосуд элементов шахтного ствола ослабление натяжения и перегрузка каната, кодовой сигнализации и аварийной остановки подъемника
Известно устройство для контроля скорости движения сосуда подъемника, содержащее размещенные на сосуде дат чик перемещения сосуда, связанный с блоком формирования и передачи информации, выход которого через канал связи подключен к входному элементу блока приема и обработки информации, расположенного стационарно, и подключенные к его выходам регистратор скорости, блок контроля превышения скорости и исполнительные элементы,и датчик перемещения навивочного органа каната ij .
Однако известное устройство не обеспечивает контроля перегруза каната подъемного сосуда, требует навески в стволе шахты маркерного каната малого диаметра, из-за чего возникае возможность обрыва этого каната и аварии с сосудом, вибрация каната И касание им стенок ствола приводит к срыву передачи информации из сосуда.
Цель изобретения - повышение надежности контроля.
Цель достигается тем, что устройство для контроля скорости движения сосуда.подъемника, содержащее размещенные на сосуде датчик перемещения сосуда, связанный с блоком формирования и передачи информации, выход которого через канал связи подключен к входному элементу блока приема и обработки информации, расположенного стационарно, и подключенные к его выходам регистратор скорости, блок контроля превышения скорости и ИСПОЛ нвтельные элементы, и датчик перемещения навивочного органа каната, снабжено включенньм между датчиком перемещения сосуда и блоком формирования и передачи информации генератором импульсов с ключевым элементом на его входе, а блок формирования и передачи информации представляет
собой управляемый от генератора импульсов вибратор, установленньш в полости, заполненной упругой средой и размещенной в подвесном устройстве сосуда, причем между сосудом и подвесным устройством введен акустоизолирукнций элемент, а входной ЭJ7eмeнт блока приема и обработки информации представляет собой механически связанный с валом направляющего канат шкива преобразователь акустического сигнала в элетрический
Кроме того, блок приема и обработки информации содержит фильтр, подключенный к входному элементу, и подключенные к выходу фильтра амплитудный дискриминатор, измеритель частоты и логический элемент И-НЕ, другой вход которого является выходом блока и соединен с датчиком nepe мещения навивочного органа, а выход - одним из выходов блока, другим выходом которого является выход измерителя частоты, а третьим - выход амплитудного дискриминатора.
При этом датчик перемещения сосуда представляет собой шарнирно закрепленный на сосуде одним концом подпружиненный рычаг, установленный на его другом конце с возможностью свободного качения по направляющей сосуда ролика, с осью которого связан тахогенератор с подключенным на его выходе преобразователем напряжения в частоту.
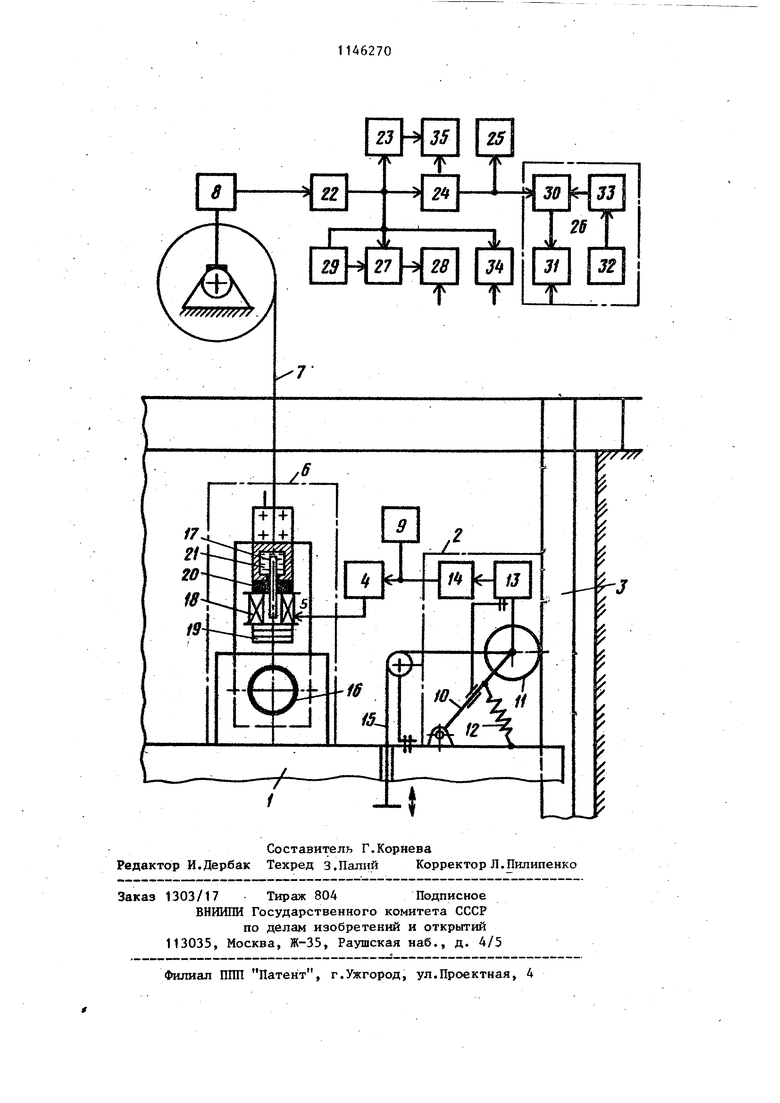
На чертеже цредставлена блок-схема устройства.
Устройство содержит устанЬвленные на подъемном сосуде 1 датчик 2 перемещения сосуда вдоль направляющей 3, генератор 4 импульсов, связанный с блоком 5 формирования и передачи информации, установленный в подвесном устройстве 6 сосуда и связанный через канал 7 связи с входным элементом 8 блока приема и обработки информации, установленньй в узле направления каната по оси подъема сосуда. На подъемном сосуде 1 установлен ключевой элемент 9 для подачи кодовы сигналов, соединенный с входом генератора 4 импульсов.
Датчик 2 содержит рычаг 10, один конец которого шарнирно соединен с сосудом 1, а другой снабжен свободно вращающимся роликом 11, жестко связанным с осью (не указана) вращения, пружину 12 прижатия ролика 11 к плоскости катания направляющей 3, установленной по высоте подъема, тахогенератор 13, кинематически сое диненный с осью вращения ролика 11, и преобразователь 14 напряжение , частота на выводе тахогенератора 13. В устройстве имеется тросик 15 устра не«ия контакта ролика 11 с направляю щей 3 и аварийной установки подъемни ка. Канал 7 связи выполнен акустическим и содержит акустоизолирующий элемент 16, расположенный между подвесным устройством 6 и сосудом 1. Элемент 16 выполнен в виде резиновой втулки, установленной на оси (не обозначена) соединения подвесного устройства 6 с сосудом 1. Блок 5 формирования и передачи сигнала снабжен на входе излучителем акустического сигнала, представляимдим собой вибратор 17, выполненный в виде магнитострикционного стерж ня, обмотку 18 возбуждения, кольцевые керамические магниты 19 для подмагничивания вибратора 17, резиновое кольцо 20 для мягкого крепления вибратора 17 к каркасу обмотки 18 возбуждения и узлу подвесного устройства 6. Вибратор 17 установлен в полости 21, заполненной жидкой упругой средой. Входной элемент 8 блока приема информации выполнен в виде преоб разователя акустического сигналй в электрический. Блок приема и обработки информации содержит на входе фильтр 22, соединенный с выходом элемента 8, к выходу фильтра 22 подключены ампли тудный дискриминатор 23, измеритель 24 частоты, к выходу которого подключен регистратор 25 .скорости и блок 26 контроля превышения задан: ной скорости. К выходу фильтра 22 подключен логический элемент И-НЕ 27 вьосод которого соединен с блоком 28 коммутации в цепях защиты подъемника от ослабления натяжения каната и сигнализации. Элемент 27 соединен с выходом датчика 29 перемещения, выполненного в виде тахогенератора, кинематически соединенного с валом привода подъемника, и реле (не указано) контакты которого подключены через источник тока (не указан) к выходу датчика 29. Блок 26 контроля превьпиения заданной скорости содержит блок 30 704 сравнения напряжений, блок 31 коммутации в цепях защиты подъемника от превьппения скорости над заданной и сигнализации, регулятор 32 подъема и программньй блок 33 преобразования задаваемой скорости движения сосуда по высоте подъема в напряжение. К вьЬсоду фильтра 22 подключен блок 34 коммутации цепей кодовой сигнализации. На выходе дискриминатора 23 подключен блок 35 коммутации в цепях защиты от перегруза .каната. . Устройство работает следующим образом. При отсутствии движения сосуда 1 сигнал от датчика 2 не. поступает. Генератор 4 все время находится в работе и вырабатывает переменный ток заданной частоты и амплитуды, который подается в обмотку 18 возбуждения излучателя акустического сигнала блока 5. Подмагничивание вибратора 17 с помощью кольцевых керамических магнитов 19 влияет на частоту колебаний вибратора 17. Материал и линейные размеры вибратора 17 оказывают влияние на его основную собственную частоту. Если вибратор 17 возбуждается на основной собственной частоте (резонансное возбуждение колебаний вибратора 17), то на нем укладывается половина длины волны звука, так что в середине вибратора образуется узел смещений стоячей волны. Именно это позволяет закрепить вибратор в каркасе обмотки 18 возбуждения за его середийу с помощью мягкого крепления - резинового кольца 20. Для получения максимальной интенсивности акустического сигнала вибратор 17 возбуждается обмоткой 18 возбуждения и генератор 4 импульсов на одной из собственных частот. Посколь У один конец вибратора 17 соединен с каналом 7 связи через полость 21, в напряженном узле подвесного устройства 6, заполненной жидкой упругой средой, то от торца вибратора 17 отражается ультразвуковая волна, энергия которой поступает через упругую среду в напряженный узел подвесного устройства бив канал 7. . Акустоизолирующий узел 16 - резиновая втулка, на оси соединения подвесного устройства 6 с сосудом 1 снижает потери энергии вибратора 17 и снижает помехи, создаваемые сосудом 1.
Канал 7 связи - канат напряжен весоч сосуда и собственным весом каната, и акустическое сопротивление его невелико
Элемент 8 воспринимает и преобразует акустический сигнал в электрический, который подается на вход фильтра 22, выделяющего частоту излучателя акустического сигнала блока 5. Поскольку сигнал генератора А не модулирован, на выходе фильтра 22 сигнал отсутствует. Это приводит к тому, что в выходных блоках 35, 25, 26 и 34 сохраняется исходное состояние.
Движения сосуда 1 нет, поэтому тахогёнератор датчика 29 не вырабатывает напряжения и реле датчика 29 не включено, поэтому на его контактах формируется напряжение, подаваемое одновременно на оба выхода датчика 29 и на входы элемента 27, на выходе которого сигнал отсутствует, а блок 28 остается в исходном состоянии.
Перед началом движения элементом 9 осуществляется подача сигналов - кратковременное прерывание вручную работы генератора 4, а следовательно, и работы излучателя,акус-30
тического сигнала блока 5, что вызывает появление импульсного сигнала на вьссоде фильтра 22, который подается в блок 34 кодовой сигнализации, выделяющий низкую частоту кодового сигнала, и накапливающий число подаваемых импульсов - сигналов. При включении подъемника в работу из схемы уиравлени я подъемников короткий ю пульс поступает на вход установки исходного состояния счетчика блока 34 кодовой сигнализации, приводящий к сбросу показаний этого счетчика.
С началом движения сосуда .1 роJBtK t f датчика 2 приходит во вращсние иэ-за своего контакта с неподвижной направляющей 3 и одновременно приводит во вращение тахогёнератор 13, который вырабатьгеает напряжение, пропорциональное скорости движения сосуда t, преобразующееся в преобразователе 14 в пропорциональную ему частоту, с которой теперь прерьтается работа генератора 4 импульсов .
Генератор 4 импульсов в свою очередь передает модулированные импульсы обмотке 18 возбуждения излучателя
акустический сигнал через полость 21 акустической связи поступает в канал 7 связи и через него к элементу 8, преобразукяцему акустический сигнал в электрический, который подается на вход блока приема и обработки информации, где освобождается от помех, пропорционально усиливается и преобразуется в прямоугольные импульсы, частота которьк во всех случаях движения сосуда 1 превышает частоту импульсов при подаче вручную кодовых сигналов во время отсутствия движения. Поэтому импуЛьсы с выхода фильтра 22 не могут пройти на счетчик блока 34 кодовой сигнализации. В то же время они поступают на счетчик периодического опроса и самоустановки измерителя 24 частоты импульсов со световой индикацией числа импульсов (скорости) и далее к преобразователю код - напряжение, преобразующему код счетчика в напряжение. Напряжение от измерителя 24 одновременно поступает на вход регистратора 25 скорости и на. вход блока 26 контроля превышения заданной скорости.
С началом перемещения навивочного
выраба тывается напряжение, обеспечивающее включение реле датчика 29. На контактах реле теперь формируется сигнал: на первом выходе - высокого уровня, а на втором - низкого уровня. Однако элемент 27 не может изменить своего исходного состояния, так как сигнал высокого уровня путевых импульсов теперь поступает от фильтра 22 на второй его вход. Поскольку генератор 4 импульсов и излучатель акустического сигнала блока 5 вырабатывают акустический сигнал заданной амплитуды, перегруза каната нет и акустическое сопротивление канала 7 связи имеет определенное значение, то амплитуда электрических импульсов на выходе фильтра 22 не достигает порога срабатывания дискриминатора 23, а блок 35 находится в исходном состоянии.
Аварийная остановка почъемннка осуществляется с помощью тросика 15, производящего остановку вращения ролика 11. Это приводит к исчезновению .импульсов на выходе датчика 2, и исчезновению сигнала высокого уровня на выходе фильтра 22. Так как при органа каната на выходе датчика 29
71
этом сигнал высокого уровня поступает только на первый вход элемента 27, то на его выходе появляется сигнал, от которого срабатывает блок 28 коммутации в цепях защиты подъемника от ослабления натяжения каната и сигнализации. Подъемник затормаживается предохранительным тормозом. Работа подъемника становится возможной только после подачи сбросового сигнала на вход установки исходного состояния блока 28.
При застревании подъемногр сосуда 1 в стволе шахты и ослаблении натяжения каната значительно увеличивается акустическое сопротивление канала 7, приводящие к исчезновению сигнала высокого уровня на выходе фильтра 22, отчего срабатьюает элемент 27 и блок 28.
При перегрузе каната наоборот снижается акустическое сопротивление канала 7 связи, амплитуда сигнала на выходе фильтра 22 возрастает до порога срабатывания дискриминатора 23, последний, срабатывая, вызывает срабатывание блока 35 коммутации в цепях защиты подъемника от перегруза каната и сигнализации.
Подъемник затормаживается предохранительным тормозом. Работа подъемника становится возможной после подачи сбросового сигнала на вход установки исходного состояния блока 35. При работе подъемника напряжение с измерителя 24 частоты импульсов поступает на регистратор 25 скорости и на первый вход блока 30, а
462708
на второй его вход поступает напряжение от программного преобразователя 33 задаваемой скорости движения сосуда по высоте подъема - задатчи5 ка напряжения в функции пути подъема сосуда, взаимодействующего с регулятором 32 подъема. И если действительная и задаваемая скорости движения сосуда равны одна другой, то напряжения на входах блока 30 также равны, что не вызывает срабатывания его и блока 31.
Если же скорость движения сосуда 1 не соответствует заданной, например при подходе сосуда 1 к приемной площадке или же возникновении переподъема сосуда, то это приводит к тому, что на входах блока 30 присутствуют напряжения равных уровней,
20 вызывающие его срабатывание и срабатывание блока 31, приводящее в свою очередь к наложению предохранительного тормоза и остановке подъемника. Работа подъемника становится возможной лишь после подачи сбросового сигнала на вход установки исходного состояния блока 35.
Точность непосредственного измерения скорости движения сосуда подъемника, срабатывания блоков контроля ослабления натяжения каната и перегруза каната, превьшения заданной скорости по высоте подъема сосуда и кодовой сигнализации повьвпают наJ дежность телеконтроля и безопасность движения сосуда при эксплуатации подъемника, обеспечивают значительную экономическую эффективность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для защиты от напуска каната при застревании подъемного сосуда в стволе | 1984 |
|
SU1255540A2 |
| Устройство защиты от напуска каната при застревании подъемного сосуда в стволе | 1979 |
|
SU861266A1 |
| Устройство защиты шахтного подъемника | 1978 |
|
SU781171A1 |
| Устройство для контроля безопасного движения шахтного подъемного сосуда | 1978 |
|
SU725998A1 |
| УКАЗАТЕЛЬ ПОЛОЖЕНИЯ ПОДЪЕМНЫХ СОСУДОВ В СТВОЛЕ ШАХТЫ | 1995 |
|
RU2086496C1 |
| СПОСОБ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАПУСКА ТЯГОВЫХ КАНАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2031830C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАПУСКА ТЯГОВЫХ КАНАТОВ | 1991 |
|
RU2011626C1 |
| СПОСОБ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАБЕГАНИЯ ГРУЖЕНЫХ ПОДЪЕМНЫХ СОСУДОВ НА ТЯГОВЫЕ КАНАТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЗАЩИТА Н.Г.ОГНЕВА) | 1994 |
|
RU2104243C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАПУСКА ТЯГОВЫХ КАНАТОВ | 1990 |
|
RU2009097C1 |
| СИСТЕМА КОНТРОЛЯ БЕЗОПАСНОСТИ КАНАТНОЙ ДОРОГИ | 1995 |
|
RU2163204C2 |
1. УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СКОРОСТИ ДВИЖЕНИЯ СОСУДА ПО ГТЬЕМНИКА, содержащее размещенные на сосуде датчик перемещения сосуда, связанный .с блоком формирования и передачи информации, выход которого через канал связи подключен к входному элементу блока приема и обработки информации, расположенного стационарно, и подключенные к его выходам регистратор скорости, блок контроля превышения скорости и исполнительные элементы, и датчик перемещения навивочного органа каната, о т л ичающееся тем, что, с целью повышения надежности контроля, устройство снабжено включенным между датчиком перемещения сосуда и блоком формирования и передачи информации генератором импульсов с ключевым элементом на его входе, а блок формирования и передачи информации представляет собой управляемый от генератора импульсов вибратор, установf ленный в полости, заполненной упругой средой и размещенной в подвесном устройстве сосуда, причем между сосудом и подвесным устройством введен акустоизолирующий элемент, а входной элемент блока приема и обработки . информации представляет собой механически связанный с валом направляющего канат шкива преобразователь акустического сигнала в электрический. 2.Устройство по п. 1, о т л и чающееся тем, что блок приема и обработки информации содержит фильтр, подключенный к входному элеi менту, и подключенные к выходу фильт(Л ра амплитудный дискриминатор, измеритель частоты и логический элемент И-НЕ, другой вход которого является выходом блока и соединен с датчиком перемещения навивочного органа, а выход - одним из выходов блока, другим выходом которого является выход измерителя частоты, а третьим - выход амплитудного дискриминатора. 3.Устройство по п. 1, о т л ичающееся тем, что датчик перемещения сосуда представляет собой шарнирно закрепленный на сосуде одним концом подпружиненный рычаг, установленный на его другом конце с возможностью свободного качения по направляющей сосуда ролика, с осью которого связан тахогенератор с подключенным на его выходе преобразователем напряжения в частоту.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Белоцерковский А.А | |||
| и др | |||
| Защита от напуска каната при застревании подъемного сосуда | |||
| - Безопасность труда в промьшленности, 1977, № 4, с | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
