(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ
ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА
| название | год | авторы | номер документа |
|---|---|---|---|
| Корреляционный измеритель скорости проскальзывания | 1983 |
|
SU1083119A1 |
| Корреляционный измеритель скорости | 1979 |
|
SU890251A1 |
| Корреляционный измеритель скорости | 1984 |
|
SU1163271A1 |
| Корреляционный измеритель скорости | 1982 |
|
SU1040418A1 |
| Корреляционный измеритель скорости | 1981 |
|
SU1024847A2 |
| Корреляционный измеритель скорости | 1983 |
|
SU1095072A2 |
| Корреляционный измеритель скорости | 1980 |
|
SU900189A2 |
| Устройство для предотвращения столкновения движущихся транспортных средств | 1978 |
|
SU769597A1 |
| Корреляционный измеритель скорости | 1972 |
|
SU466453A1 |
| Корреляционный измеритель скорости | 1987 |
|
SU1509743A1 |

Изобретение относится к диагности рованию технического состояния назем ных транспортных средств и может най ти применение при научно-исследовательских испытаниях автомобилей на управляемость и устойчивость движения , а также при дорожных испытаниях автомобилей на автозаводах, аатотранспортных предприятиях, станциях агностического и технического обслуживания и т.д. Известен корреляционный измеритель скорости включающий два усилителя-ограничителя, два раздельных регистра сдвига, две схемы совпадения, и вычитания и два элемента ИЛИ, к входам которых подключен интегратор с генератором тактовой частоты 11). В этом измерителе скорости, с целью повышения точности измерения скорости по корреляционной функции, формируют сигнумпсигнгшы, соответствующие входным сигналам как положительной, так и от)ицательной полярности. Поэтому в результате измерени осуществляется непрерывный анализ и обеспечивеется интегрирование всей длительности случайного процесса, вдвое увеличивая количество отсчетов. Однако известный измеритель измеряет скорость и пройденный путь объекта только в одномерной системе координат. В ряде случаев, особенно при испытаниях автомобилей .и других подвижных объектов, требуется точное и быстрое фиксирование реальной траектории движения и измерять составляющие скорости движения в двухмерной системе координат, а также угол увода и курса движения. Кроме того, при автоматическом управлении направлением движения необходимо знать текущие значения координат на дороге йля выработки сигнала коррекции.. Наиболее близким техническим решением к изобретению является устройство для определения траекторий наземного транспорта средства . содержащее корреляционные измерители скорости,вычислительный блок, датчик постоянного сигнала, блок регистрации 2 . Однако устройство является недостаточно точным. Цель изобретения - повышение точности.
Указанная цель достигается тем, что в устройстве для определения траекторий движен1 я наземного транспортного средства, содержащем первый и второй корреляционные измерители скорости, входы первого из которых являются соответственно первым и вторым входами устройства, первый и второй выходы первого корреляционного измерителя скорости подключены соответственно к первому и второму входам вычислительного блока, третий и четвертый входы которого являются соответственно третьим и четвертым входами устройства, пятый вход, которого соединен с датчиком постоянного сигнала, а выход вычислительного блока подключен к входу блока регистрации, второй корреляционный измеритель скорости содержит первый и второй регистры сдвига, первый и второй элементы И, первый и второй элементы ИЛИ, интегратор, генератор тактовых импульсов и усилитель-ограничитель, вход которого является пятым входом устройства, прямой и инверсный выход усилителя-ограничителя соединены соответственно с входами первого и Второго регистров сдвига, первый и второй выходы которого подключены соответственно к первому и второму входам соответственно первого и второго элементов И, третьи входы которых подключены соответственно к первому и третьему выходам первого корреляционного и-змерителя скорости, первый и второй выходы первого элемента И соединены соответственно с первыми входами первого и второгоэлементов ИЛИ, вторые вХоды которых подключены соответственно к первому
и второму выходам второго элемента И, выходы элементов И соединены соответс;твенно с первым и в.торым входами интегратора, выход которого подключен к управляющему входу генератора тактовых импульсов, выход которого подключен к управляющим
входам первого и второго регистров сдвига и к шестому входу вычислительного блока, седьмой вход которог соединен с первым выходом первого регистра сдвига.
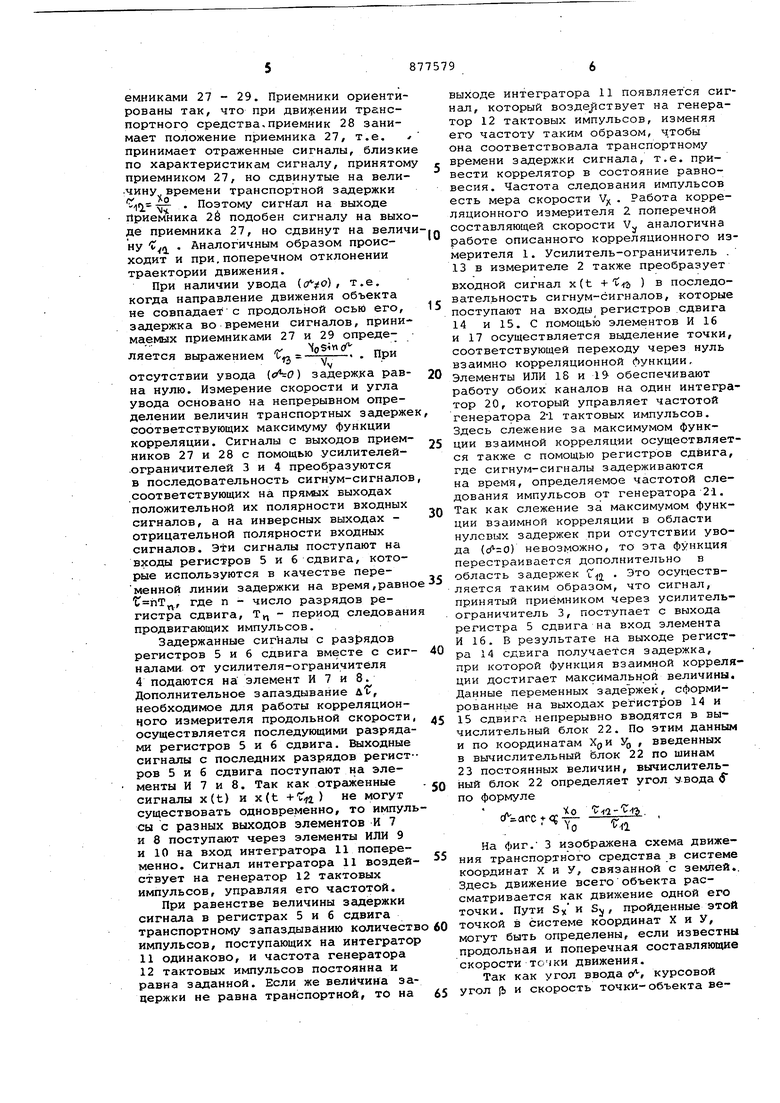
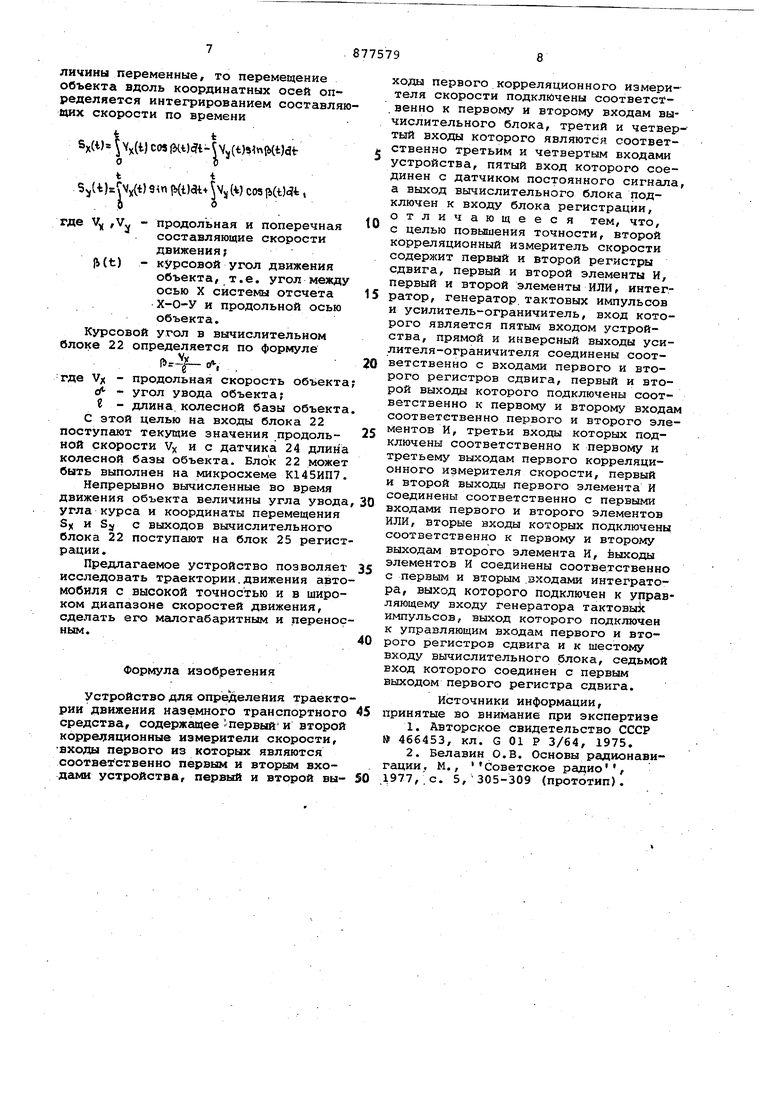
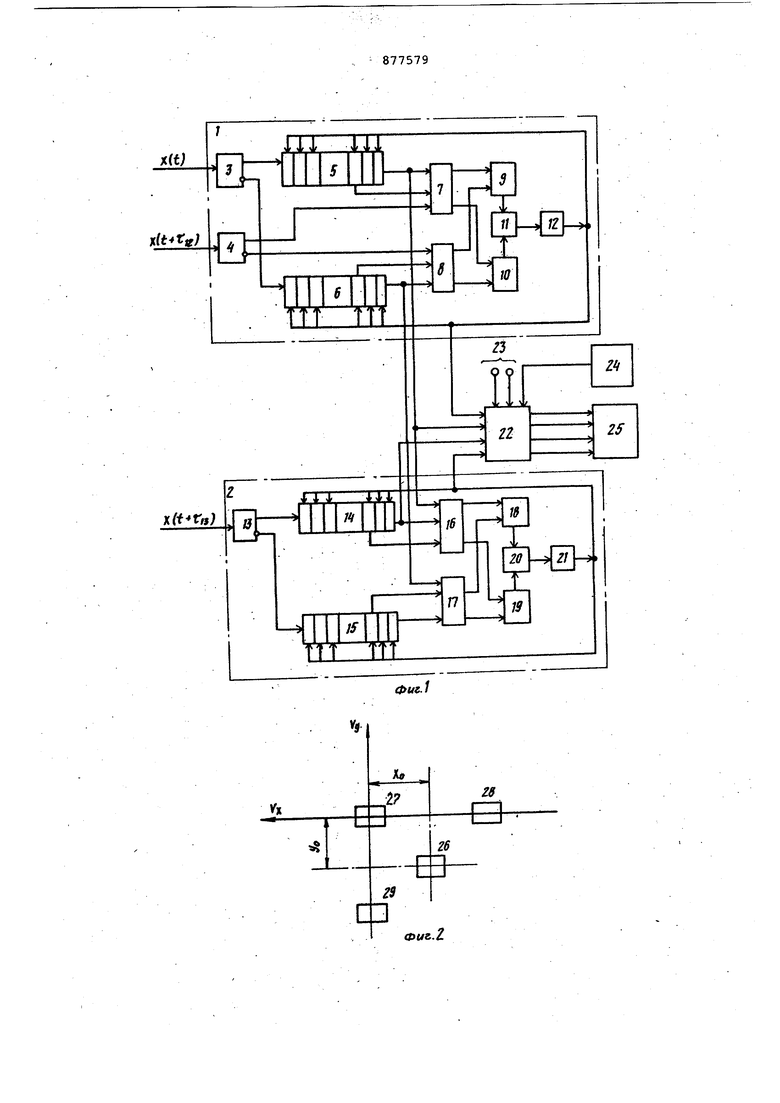
На фиг. 1 изображена блок-схема устройства; на фиг. 2 - схема движения автомобиля в системе координат, связанной с землей; на фиг.З П 3едставлена схема расположения приемных излучателей.
Устройство для определения траекторий наземного транспортного средства состоит из двух корреляционных измерителей 1 и 2 продольной и поперечной составляющих скорости. Корреляционный измеритель 1 продольной составляющей состоит из двух усилителей-ограничителей 3 и 4, двух регистров 5 и 6 сдвига, к выходам которых подключены элементы И 7 и 8.
Вход регистра 5 и один из входов элемента И 7 подключены к прямым выходам усилителей-ограничителей 3 и 4, а вход регистра б и один из входов элемента И 8 - к инверсным выходам тех же усилителей. Первые и вторые выходы элементов И 7 и 8 через элементы ИЛИ 9 и 10 соединены с интегратором 11. к выходу интегратора 11 подключен генератора 12 тактовых импульсов, частота следования импульсов которого меняется в зависимости от выходного напряжения интегратора. Выход генератора 12 тактовых импульсов подключен к регистрам 5 и 6 сдвига. Ко)реляционный измеритель 2 поперечной составляющей скорости содержит усилитель-ограничитель 13, два регистра 14 и 15 сдвига, два элемента И 16 и 17, первые входы которых подключены к соответствующим выходам регистров 5 и б сдвига корреляционного измерителя 1 продольной скорости. Элементы И 16 и 17 и. по два выхода, которые подключёчы через элементы ИЛИ 18 и 19 к интегратору 20. К выходу последнего подключен генератор 21 тактовых импульсов, выход которого подключен к регистрам 14 и 15 сдвига и к вычислительному блоку 22, три. входа которого подключены соответственно к генератору 12 тактовых импульсов и к выходам обоих регистров 5 и б сдвига. Остальные входы вычислительного блока 22 соответственно подключены к шинам 23 постоянных величин и к датчику 24 постоянного сигнала базы автомобиля. Выходы блока 22 подключены к блоку 25 регистрации.
Устройство для регистрации траектории движения наземного транспортного средства работает следующим образом.
На входы корреляционных измерителей 1 и 2 поступают три отраженных от дорожного полотна сигнала произвольной формы x(t), X (t + ) и x(t + ) сдвинутых на величины транспортных запаздываний В этих случаях приемно-передающая часть строится по обычной схеме радиолокации: передатчик-антенналрИемник, которые устанавливаются на транспортном объекте. Приемные излучатели располагаются несимметрично относительно продольной оси объекта и разнесены по продольной и поперечн осям его (фиг. 2), на расстоянии Хд и VQ соответственно относительно передатчика 26. При этом приемники 27 и 28- используются для измерения продольной составляющей скорости V , а приемники 27 и 29 - для измерения поперечной составляющей скорости Vo и угла увода о . Передатчик 26 излучает направленные в сторону поверхности дороги сигналы, а отраженные дорогой сигналы принимаются приемниками 27 - 29. Приемники ориенти рованы так, что при дви)ении транспортного средства,приемник 28 занимает положение приемника 27, т.е. принимает отраженные сигналы, близк по характеристикам сигналу, принято приемником 27, но сдвинутые на вели чину времени транспортной задержки Поэтому сигнал на выходе Приемника 28 подобен сигналу на вых де приемника 27, но сдвинут на вели ну Cy,j . Аналогичным образом происходит и при.поперечном отклонении траектории движения. При наличии увода () , т.е. когда направление движения объекта не совпадает с продольной осьй его, задержка во времени сигналов, прини маемых приемниками 27 и 29 определяется выражением f . При отсутствии увода (0) задержка рав на нулю. Измерение скорости и угла увода основано на непрерывном определении величин транспортных задерж соответствующих максимуму функции корреляции. Сигналы с выходов прием ников 27 и 28 с помощью усилителейограничителей 3 и 4 преобразуются в последовательность сигнум-сигнало .соответствующих на выходах положительной их полярности входных сигналов, а на инверсных выходах отрицательной полярности входных сигналов. Эти сигналы поступают на входы регистров 5 и 6 сдвига, которые используются в качестве переменной линии задержки на время,равн , где п - число разрядов регистра сдвига, Tf, - период следован продвигающих импульсов. Задержанные сигналы с раз{эядов регистров 5 и 6 сдвига вместе с сиг налами от усилителя-ограничителя 4 подаются на элемент И 7 и 8. Дополнительное запаздывание д, необходимое для работы корреляционного измерителя продольной скорости осуществляется последующими разряда ми регистров 5 и 6 сдвига. Выходные сигнсшы с последних разрядов регист ров 5 и б сдвига поступают на элементы И 7 и 8. Так как отраженные сигналы x(t) и x(t ) не могут существовать одновременно, то импуль сы с разных выходов элементов И 7 и 8 поступают через элементы ИЛИ 9 и 10 на вход интегратора 11 попеременно. Сигнал интегратора 11 воздействует на генератор 12 тактовых импульсов, управляя его частотой. При равенстве величины задержки сигнала в регистрах 5 и б сдвига транспортному запаздыванию количеств импульсов, поступающих на интегратор 11одинаково, и частота генератора 12тактовых импульсов постоянна и равна заданной. Вели же величина зацержки не равна транспортной, то на выходе интегратора 11 появляется сигНсш, который возде 1ствует на генератор 12 тактовых импульсов, изменяя его частоту таким образом, ч.тобы она соответствовала транспортному времени задержки сигнала, т.е. привести коррелятор в состояние равновесия. Частота следования импульсов есть мера скорости у. Работа корреляционного измерителя 2 поперечной составляющей скорости V, аналогична работе описанного корреляционного измерителя 1. Усилитель-ограничитель . 13в измерителе 2 также преобразует входной сигнал x(t +u-ia ) в последовательность сигнум-сигналов, которые поступают на входы регистров сдвига 14и 15. С помощью элементов И 16 и 17 осуществляется выделение точки, соответствующей переходу через нуль взаимно корреляционной функции. Элементы ИЛИ 18 и 19 обеспечивают работу обоих каналов на один интегратор 20, который управляет частотой генератрра 21 тактовых импульсов. Здесь слежение за максимумом функции взаимной корреляции осуществляется также с помощью регистров сдвига, где сигнум-сигналы задерживаются на время, определяемое частотой следования импульсов от генератора 21. Так как слежение за максимумом функции взаимной корреляции в области нулевых задержек при отсутствии увода () невозможно, то эта функция перестраивается дополнительно в область задержек Г . Это осурдествляется таким образом, что сигнал, принятый приёмником через усилительограничитель 3, поступает с выхода регистра 5 сдвига на вход элемента И 16. В результате на выходе регистра 14 сдвига получается задержка, при которой функция взаимной корреляции достигает максимальной величины. Данные переменных задержек, сформированные на выходах регистров 14 и 15сдвига непрерывно вводятся в вычислительный блок 22. По этим данным и по координатам Уд , введенных в вычислительный блок 22 по шинам 23 постоянных величин, вычислительный блок 22 определяет угол увода по формуле Ч о ) f 5J Vo На фиг. 3 изображена схема движения транспортного средства в системе координат X и У, связанной с землей.. Здесь движение всего объекта рассматривается как движение одной его точки. Пути ЗУ и S.J, пройденные этой точкой в системе координат X и У, могут быть определены, если известны продольная и поперечная составляющие скорости точки движения. Так как угол ввода сА, курсовой угол Р) и скорость точки- объекта величины переменные, то перемещение объекта вдоль координатных осей определяется интегрированием составляю щих скорости по времени t t . . , V) C« 0(t)t-W,,(t)e1nlb(t)3ir 0 5 t t s,,(t)Cvy(t) tKt),(i) cosiiCtwt, где V ,V - продольная и поперечная составляющие скорости движения; ji(t) - курсовой угол движения объекта, т.е. угол между осью X системы отсчета Х-О-У и продольной осью объекта. Курсовой угол в вьтаислительном блоке 22 определяется по формуле (. , где УХ - продольная скорость объекта df- - угол увода объекта; - длина колесной базы объекта С этой целью на входы блока 22 поступают текущие значения продольной скорости Vx и с датчика 24 длина колесной базы объекта. Блок 22 может быть выполнен на микросхеме К145ИП7 Непрерывно вычисленные во время движения объекта величины угла увод угла курса и координаты перемещения Sx и S с выходов вычислительного блока 22 поступают на блок 25 регис рации. Предлагаемое устройство позволяе исследовать траектории.движения авт мобиля с высокой точностью и в широ ком диапазоне скоростей движения, сделать его малогабаритным и перено ным. Формула изобретения Устройство для определения траект рии движения наземного транспортног средства, содержащее первый и второ корреляционные измерители скорости, входы первого из которых являются соответственно первым и вторым входами устройства, первый и второй вы ходы первого корреляционного измерителя скорости подключены соответственно к первому и второму входам вычислительного блока, третий и четвертый входы которого являются соответственно третьим и четвертым входами устройства, пятый вход которого соединен с датчиком постоянного сигнала, а выход вычислительного блока подключен к входу блока регистрации, отличающееся тем, что, с целью повышения точности, второй корреляционный измеритель скорости содержит первый и второй регистры сдвига, первый и второй элементы И, первый и второй элементы ИЛИ, интегратор, генератор, тактовых импульсов и усилитель-ограничитель, вход которого является пятым входом устройства, прямой и инверсный выходы усилителя-ограничителя соединены соответственно с входами первого и второго регистров сдвига, первый и второй выходы которого подключены соответственно к первому и второму входам соответственно первого и второго элементов И, третьи входы которых подключены соответственно к первому и третьему выходам первого корреляционного измерителя скорости, первый и второй выходы первого элемента И соединены соответственно с первыми входами первого и второго элементов ИЛИ, вторые входы которых подключены соответственно к первому и второму выходам второго элемента И, выходы элементов И соединены соответственно с первым и вторым .входами интегратора, выход которого подключен к управляющему входу генератора тактовых импульсов, выход которого подключен к управляющим входам первого и второго регистров сдвига и к шестому входу вычислительного блока, седьмой вход которого соединен с первым выходом первого регистра сдвига. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 466453, кл. G 01 Р 3/64, 1975. 2.Белавин О.В. Основы радионавигации, М., Советское радио , Д977,.с. 5,305-309 (прототип).
УН
Z8
€3
26
V
