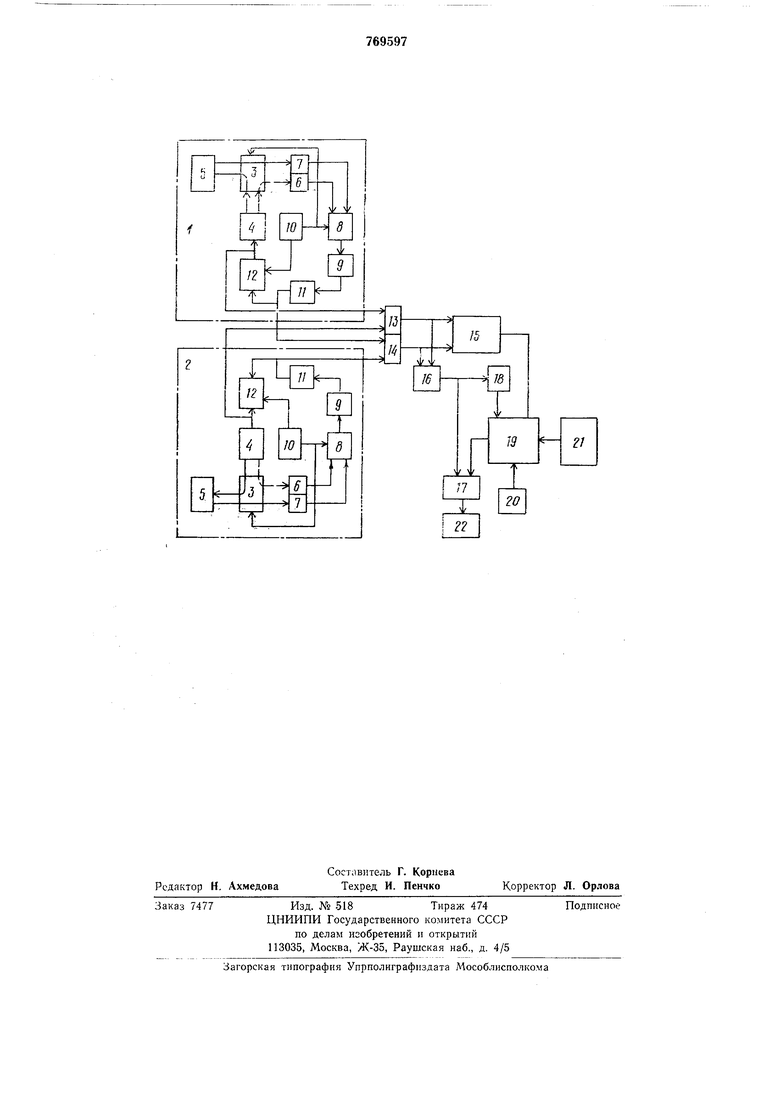
ми 6 и 7 излучения, выходы которых подключены через переключатель 8 полярности на интегратор 9. Первый выход тактового генератора 10 соединен со входами светокоммутатора 3 и переключателя 8 полярности. Выход интегратора 9 подключен через ключевой элемент 11 на вход блока 12 питания, второй вход которого соедине со вторым выходо 1 тактового генератора 10, выход блока питания 12 - с источником 4 излучения. Выходы ключевых элементов И и блоков 12 питания преобразователей 1 и 2 иодключены через элементы 13 и 14 «ИЛИ на входы блока 15 определения относительиой скорости и иараллельно иа входы блока 16 текущей дальности. Последний своим выходом непосредственно подключен на вход блока 17 сравнения, а через блок 18 дифференцирования - иа один нз в.ходов блока 19 определения безоиасиой дистанции, соедииенный с датчиком 20 скорости. Второй вход этого блока соединен с выходо.м блока 15 определения относптельной скорости, а третий, четвертый и пятый входы олока 19 определения безопасной дистанции - с блоко.м 21 задания иачальиых условий движения. Выход блока 19 определения, безопасной дистаиции подключеи ко второму входу блока 17 сравнения, выход которого - подключеп ко второму входу блока 17 сравнения, выход которого - подключен ко второму входу блока 17 сравнения, выход которого подключен к исполнительному механизму 22.
Устройство работает следующим образом.
Преобразователи 1 и 2 с иомощью источника 4 излучения в иервый период следования через светокоммутатор 3 и элемент 5 зондируют модулированным сигналом впереди движущийся объект. Этот сигнал, отраженный от объекта, в следующий полупериод (паузу) улавливается через элемент 5 и светокоммутатор 3 приемником излучения, на выходе которого он преобразуется в электрический импульс. Этот импульс поступает через переключа:тель 8 полярности на вход интегратора 9. В это же время происходит компенсация отраженного сигнала. Сигиал от источника 4 через светокоммутатор 3 поступает на приемник 6 излучения. Коэффициент передачи светокоммутатора 3 для компенсационных сигналов значительно меньше, чем для отраженных от объекта. И.мнульс с выхода приемника 6 излучателя при помощи переключателя 8 изменяет свою поляр ность и поступает на вход интегратора 9. Управление переключателем 8 осуг1Д,ествляется . генератором 10 синфазно с переключением светокоммутатора 3. При этом на входе интегратора 9 происходит сравнение отраженного и компенсированного сигна лов. В случае, если их средние значения не
равны, то на выходе интегратора 9 создается электрическое напряжение, линейновозрастающее во вре.мени. По достижении на выходе интегратора 9 уровня, при которо.м срабатывает элемент 11, на выходе последней появляется импульс, который занускает блок нитаиия. В результате этого имиульсный источник 4 генерирует компенсирующий поток, восстанавливающий равенство снгналов на входе интегратора 9. В установивщемся режиме отраженный и компенсирующий потоки в среднем равны, т. е. длительность импульса на выходе элемента 11 пропорциональна длительности
сигнала отражения от объекта. Поэтому перед работой можно проводить калибровку по объекту, отражение которого известно. Калибровка может осущесгвляться нуTCN изменения уровня комиенсирующего
сигнала посредством ввода светофильтра переменной плотности luiii другими методами.
Па выходе блока 12 иреобразователей 1 и 2 вырабатываются и.мпульсы посылки зондирующего сигнала на объект, а на выходе элемента 11 формируются имиульсы, соответствующие приему отражеиных сигналов от объекта. По этим сигналам, периодически постуиаюпшм через эле.менты «ИЛИ 13 н 14, блок 15 определення относительной скорости вычисляет скорость движения впереди движущегося объекта отиосительио сзади движущегося,
а блок 16 текущей дальности непрерывно вычисляет расстояние между объектами. Блок 15 определения относительной скорости может быть выполнен по типовой корреляцнонной или допплеровской схе.мам
измерения скорости. Из.мерение расстояния между объектами блок 16 текущей дальности ироизводит фиксацией времени между .моментом иосылки зондирующего сигнала на объект и приемом его после отражения
от объекта. Текущее расстояние (R) опрееляется по формуле;
.
R .
где С
скорость распространения сигнаиала;
t;, - Время между зондирующим н отраженным сигналами. С номощью блока 18 дифференцирования определяется скорость сближения или удаления. Сигналы, снимаемые с блоков 15 для определения относительной скорости и блока 18 дифференцирования поступают на входы блока 19 определения безопасной дистанции, который производит вычисления безоиасного интервала между объектами, прикотором Б03,можна безаварийная остановка движущегося . объекта сзади.
Безопасный интервал (S) определяется по формуле:
S -- VoTcp + Vo -- k (Vo± V,,Ti,)-i
где Vo - скорость движения контро.тпруемого объекта: Тер - время срабатывания тормозной
системы;
VOTII - относительная скорость; „ - установившеесязамедление.
JVCT
k - коэ(|зфицисит, связывающий замедление впереди и сзади движуии1хся объектов, k 1; (( - ко:)ффиииент сцеиления с дорогой;
g - ускорение силы тяжести. Скорость Vo определяется датчиком скорости 20, схема которого может быть выиолнена на доиилеровском эффекте или на корреляционном методе.
По даииым, поступающим из блока 21, блок 19 определения безопасной дисгаиции вычисляет безопасный интервал между движуп;имнся объектами. Для того, чтобы обеснечивалось своевременное торможение при наличии опасной ситуацгн, т. е. автоматическн соблюдался безоиасный интервал между объегстами, блок 19 определеиия безоиасиой дистанции по сигналу с блока 18 дифференцирован 1я ири сближении объектов производит вычитание величии УО - VOTH, а ири удалении - сложение (Vo + VOT, ) Блок 19 определення безопасной дистанции может быть БЫИОЛнен, например, на мнкрос.хеме типа К145 ИП7. Величины, сннмаемые с блока 16 текун1ей дальности н блока 19 определения безоиасиой дистанции, постуиают в блок 1 сравнения. Когда текуи1,ая дальнос1ь стаиовптся меиьиге величины безопасной диета иции, на выходе блока 17 иг)яг о1яется сигнал, который поступает иа .механизм 22. Последний производит торможение движущегося транспортного средства. Если текущая дальность окажется больше величины безопасной дистанщп, то мехаииз.м 22 производит разгон транспортно|-о средства.
что позволяет повысить 1 нтенсивность движения.
Предложенное устройство дает возможность избежать аварийной ситуации, в частности, иаезда, исключить ошибки водителя, являющиеся главной причиион больщинства аварий на дорогах. Это устройство также дает возможность обеспечить автоматическое торможение в оиасных ситуациях при въезде в улицы с односторонним движением и при экстренном маневре, «смены полосы двнження автомобиля.
Ф о ) м у л а и 3 о б р е т е н и я
Устройство для предотвращения столкновения движущихся транспортных средств, содержаи1ее источник и приемник излучен 1я, блок определения безоиаспой дпста -Цчи с датчиком скорости и блок определения текущей далыюстн, подключенные свои ги выходами к входам блока сравнения, о т л ич а ю ще,е с я тем, чго, с целью иовыщения эффективност г устройства и повыщення его надежиости, оно снабжено преобразователями коэффициента отражения оитпческого сйгиала в электрическпй сигиал и иодключеиными к их выходам через элементы «ИЛИ блоком определения относнтельной скорости, блоком дифференцирования и блоком задания начальных условий -движения, подключенным к одному из входов блока определения безопасной дистанции, к другим входам которого
подключены своими выходами блок днфференцироваиия, иодключенный свои.м входо.м к выходу блока оиределенпя гекущей дальности, и блок определення относительной скорости, нри этом оптические элементы преобразователей установлены на нередней части транспортного средства и разнесены по его поперечному габариту.
Источники информации, принятые во внимание при экспе{)тизе
1. Авторское свидетельство СССР 553558, кл. G 01S 11/00, 1976 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СВЕРХЗВУКОВОГО НИЗКОЛЕТЯЩЕГО ОБЪЕКТА ПО СЛЕДУ НА МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2421751C1 |
| Устройство для предотвращения столкновения движущихся объектов | 1973 |
|
SU553558A1 |
| ИМПУЛЬСНЫЙ СВЕРХШИРОКОПОЛОСНЫЙ ДАТЧИК | 2008 |
|
RU2369323C1 |
| Система защиты кораблей от подводных дронов | 2024 |
|
RU2832756C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| Способ и устройство предупреждения столкновений транспортного средства | 2019 |
|
RU2707970C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2837059C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДЫХАНИЯ И СЕРДЦЕБИЕНИЯ | 2008 |
|
RU2392853C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРПЕДЫ | 2014 |
|
RU2568935C1 |
| СИСТЕМА КОНТРОЛЯ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1994 |
|
RU2092887C1 |