1
Изобретение относится к приборостроению, а именно к устройствам, предназначенным дгя определения скорости и пройденного пути движущихся объектов и может быть использовано, например, для измерения скорости проката и для навигации летательных аппаратов.
По основному авт.св. № 4б6 53 известен корреляционный измеритель скорости, содержащий два входных усилителя-ограничителя, выходы первого из которых соединены со входами первого и второго регистров сдвига, а выходы второго - с первыми входами совмещенных схем совпадения и вычитания, вторые и третьи входы которых .соединены соответственно с промежуточными и последними ячейками первого и второго регистров сдвига первый выход первой совмещенной схемы совпадения и вычитания соединен с первым входом первой схемы ИЛИ, второй вход которой соединен со вторым выходом второй совмещенной схемы совпадения и -сочетания, а первый выход второй совмещенной схемы совпадения и вычитания сое динен с первым входом второй схемы ИЛИ, второй вход которой соединен со вторым выходом первой совмещенной схемы совпадения и вычитания, выходы схем ИЛИ соединены с интегратором, выход которого соединен с
10 генераторюм тактовых импульсов соединенного своим выходом, со входами продвигаюиих импульсов регистров сдвига и входом счетчика 1П.
IS
Однако точность известного корреляционного измерителя скорости огра ничивается методическими и инструментальными ошибками и составляет величину одного порядка с допплеровс10кими. Это приводит к ошибкам измерения скорости и пройденного пути.
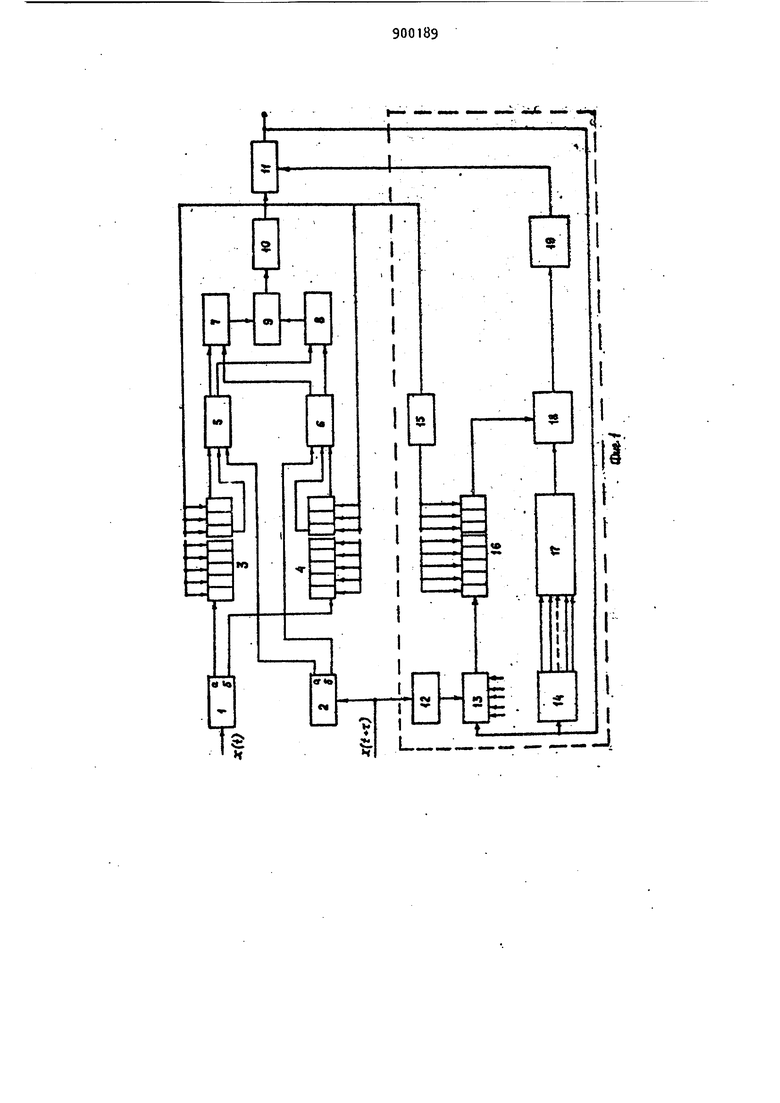
Цель изобретения - повышение точности измерения. 3 9 Поставленная цель достигается тем, что в корреляционный измеритель скорости дополнительно вводятся преобразователь сигнала, схемы включения регистра текущей карты местности и выбора эталонной карты местности, регистр текущей карты мес ности, блок памяти эталонной карты местности, схема обработки карт, делитель импульсов тактовой частоты и схема коррекции пути, при этом вход второго усилителя-ограничителя через преобразователь сигнала и схему включения регистра текущей карты местности соединен с сигнальными входом регистра текущей карты местно ти, входы продвигающих импульсов кот рого подключены через делитель часто ты к вь1ходу генератора тактовых импу сов, выход регистра текущей карты местности соединен с первым входом схемы обработки карт, второй вход которой подключен к выходу блока пам ти эталонной карты местности, а ее выход - к схеме коррекции пути, выхо которой подключен к корректирующему входу сметчика пути, а его выход сое динен с коммутирующими входами схемы включения регистра текущей карты мес ности и схемы выбора эталонной карты местности, выходы которой подключены к блоку памяти эталонной карты местности. На фиг. 1 представлена функционал ная схема устройства; на фиг. диаграмма. В устройство входят два усилителя - ограничителя 1 и 2, два раздель ных регистра 3 и t сдвига, совмещенные схемы 5 и 6 совпадения и вычитания , схемы ИЛИ 7 и 8, интегратор 9)г нератор 10 тактовых импульсов,счетчи 11 импульсов, преобразователь 12 сиг нала, схема 13 включения, схема И выбора эталонной карты местности, делитель 15 частоты тактовых импульсов, регистр 16 текущей карты местности, блок 17 памяти эталонной карты местности, схема 18 обработки кар схема 19 коррекции пути. Выходы первого усилителя-ограничи теля 1 соединены со входами первого 3 и второго 4 регистров сдвига. Выхо ды второго усилителя-ограничителя соединены с первыми входами совмещен ных схем 5 и 6 совпадения и вычитания, вторые и третьи входы которых соединены соответственное промежуточ ными и последними ячейками первого 3 и второго k регистров сдвига. Лервый выход первой совмещенной схемы 5 совпадения и вычитания соединен с первым входом первой схемы ИЛИ 7, второй вход которой соединен со вторым выходом второй совмещенной схемы 6 совпадения и вычитания. Первый выход второй совмещенной схемы 6 совпадения и вычитания соединен с первым входом второй схемы ИЛИ 8, второй вход которой соединен со вторым выходом первой совмеще|чной схемы 5 совпадения и вычитания. Выходы схем ИЛИ 7 и 8 соединены с интегратором 9, выход которого соединен с .генератором 10 тактовых импульсов, Соединенного своим выходом со входами продвигающих импульсов регистров и 3 сдвига, входом счетчика 11 и входом делителя 15, через преобразователь 12 сигнала и схему 13 включения с сигнальным входом регистра 1б текущей карты местности, входы продвигающих импульсов которого подключены к выходу делителя 15 частоты. Выход регистра 16 текущей карты местности соединен с первым входом схемы 18 обработки карты, второй вход которой подключен к выходу блока 17 памяти эталонной карты местности, а ее выход - к схеме 19 коррекции пути, своим выходом подключенной к корректирующему входу счетчика 11 импульсов. Выход счетчика 11 импульсов подключен к коммутирующим входам схемы 13 включения и схемы выбора эталонной карты местности, выходы которой подключены к блоку 17 памяти эталонной карты местности. Устройство работает следующим образом. На вход измерителя поступают два сигнала произвольной формы x(t) и x(t-t-Lr), сдвинутых на величину транспортного запаздывания . Усилителиограничители преобразуют эти сигналы в сигнум-сигналы sign (x(t) и 5 ign X i t-t-C )., соответствующие положительной полярности -входных сигналов, на выходе а- sign2,x(t) и 5 (t-1-Т ) , соответствующие отрицаельной полярности входных сигналов на выходе & . Сигнум-сигналы поступают на входы регистров 3 и k, где эти сигналы квантуются по времени с частотой импульсов генератора 10 тактовых импульсов и задерживаются на время, определяемое частотой следования импульсов. Так как выбросы исходного сигнала не могут существовать одновременно, то на вхо ды схем ИЛИ 7 и 8 импульсы с первых выходов схем совпадения.вычитания поступают попеременно. Схемы ИЛИ обеспечивают работу обоих каналов на единую схему интегрирования. При равенстве велич.шы задержки сигнала в регистрах транспортному запаздыванию количество импульсов, поступающих на интеграторы, одинаково и частота ген ратора постоянна и равна заданной. При недокомпенсации соотношение количества импульсов со схем ИЛИ изменяется так, чтобы привести коррелятор в состояние равновесия. Частота следования импульсов есть мера скорости, а общее количество импульсоэ, накопленное счетчиком 11, есть пройденный объектом путь. Для осуществления коррекции пути снимается текущая карта местности во время полета над выбранным участком Один из сигналов датчика, например xlt+t), подается на вход преобр зователя 12, на выходе которого выделяется напряжение с уровнем, пропорциональным величине измеряемого физического параметра. В качестве этого параметра используется коэффициент яркости, коэффициент отражения или высота профиля рельефа мест.ности. Выход преобразователя 12 через с му 13 включения, подключен ко входу регистра 1б текущей карты местности Участок коррекции выбирается при дв жении объекта над контактным участком подстилающей поверхности, расст ние до которого х(фиг.2). В схему 13 включения вводятся программные значения пути коррекции х , х,„. На второй ее вход подается текущ-.-г значение пройденного пути х из схе мы 11. При равенстве измеренной и программной дальностей схема 13 вклю чения подключает выход преобразователя 12 к регистру 16 текущей карты местности, в которой записываются значения параметров текущей карты местности. Продвигающие импульсы регистра 1 текущей карты местности формируются из импульсов тактовой частоть; коррелятора путем давления частоты их в определенное число раз, равное К. Оно опредепяется по отношению продольного размера отражающей площадки а к цене импульса дальности So ле а 2Ht9 где Н высота датчиков (оптических или радио) над поверхностью;ширина диаграммы направленности i . база между приемными антеннами (оптикой) датчиков-, среднее.число рабочих ячеек регистров 3 или k коррелятора.. Это обеспечивает запись текущей карты в регистр 16 текущей карты местности 3 виде последовательности независимых отсчетов. Для записи текущей карты местности выход генератора 10 тактовых импульсов через делитель 15 частоты подключен к регистру 16 текущей карты местности. Запись текущей карты производится до заполнения регистра. Одновременно с началом записи текущей карты счетчик 11 выдает сигнал на схему 1 выбора эталонной карты местности. Записанные для каждого участка коррекции эталонные карты местности хранятся в блоке 17 памяти. Схема 18 обработки карт производит сличение текущей карты местности и эталонной кзрты местности путем их сдвигов относительно друг друга. При этом могут использоваться любые из способов корреляционной обработки цифровых карт. Отклонение координаты х относительно программной точки Хцопределя ется по необходимому сдвигу текущей карты местности относительно эталонной карты местности-на число ячеек N, что соответствует линейному отклонению AX.,N Это значение вводится в схему 19 коррекции пути, через которую выдается исправленное значение пути, измеренное счет-чиком 1J . Изобретение с предлагаемыми устройствами коррекции пути летательного аппарата может обеспечить повышенир томности навигации по сравнению с известным корреляционным измерителем скорости.
Формула изобретения
Корреляционный измеритель скорости по авт.ев, № (. отличающийся тем, что, с целью повышения точности измерения, он снабжен преобразователем сигнала, схемами включения регистра текущей карты местности и выбора эталонной карты местности, регистром текущей карты местности, блоком памяти эталонной карты местности, схемой обработки карт, делителем импульсов тактовой частоты и схемой коррекции пути, при этом lixofl второго усилителя-ограничителя через преоб разователь сигнала и схему включения регистра текущей карты местности
соединен с сигнальным входом регистр текущей карть местности, входы продвигающих импульсов которого подключены через делитель частоты к выходу генератора тактовых импульсов, выход регистра текущей карты местности соединен с первым входом схемы обработки карт, второй вход которой подключен к выходу блока памяти эталонной карты местности, а ее выход к схеме коррекции пути, выход которой подключен к корректирующему входу счетчика пути, а его выход соединен с коммутирующими входами схемы включения регистра текущей карты местности и схемы выбора эталонной карты местности, выходы которой подключены к блоку памяти эталонной карты местности.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № , кл. G 01 Р З/б, 1975.
X
l

| название | год | авторы | номер документа |
|---|---|---|---|
| Корреляционный измеритель скорости | 1983 |
|
SU1095072A2 |
| Корреляционный измеритель скорости | 1981 |
|
SU1013858A2 |
| Корреляционный измеритель скорости | 1981 |
|
SU1024847A2 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ ВЕКТОРА СКОРОСТИ | 2001 |
|
RU2188432C1 |
| СИСТЕМА НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2022356C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО КАРТЕ ВЫСОТ МЕСТНОСТИ И СИСТЕМА НАВИГАЦИИ, ИСПОЛЬЗУЮЩАЯ СПОСОБ | 2016 |
|
RU2654955C2 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО ФОРМИРОВАНИЯ ЭТАЛОННОЙ ИНФОРМАЦИИ ДЛЯ НАВИГАЦИОННЫХ СИСТЕМ | 2012 |
|
RU2520386C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ЭТАЛОННОЙ КАРТЫ МЕСТНОСТИ ДЛЯ НАВИГАЦИОННЫХ СИСТЕМ | 1992 |
|
RU2022355C1 |
| ДЕМОДУЛЯТОР СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2460224C1 |
| Устройство для оценки амплитуды узкополосного случайного процесса | 1987 |
|
SU1515174A1 |