(54) ЦИФРОВОЙ ПРИВОД

| название | год | авторы | номер документа |
|---|---|---|---|
| Силовой гидроцилиндр с механической фиксацией штока | 2016 |
|
RU2622684C1 |
| УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ ДЛЯ ПОГРУЖЕНИЯ СТЕРЖНЕЙ В ГРУНТ | 2010 |
|
RU2443827C1 |
| ЗАПОРНО-ПУСКОВОЕ УСТРОЙСТВО | 2007 |
|
RU2347597C1 |
| Пневмогидравлический привод | 1985 |
|
SU1355775A1 |
| ПНЕВМАТИЧЕСКИЙ ДЕМПФЕР | 1994 |
|
RU2082040C1 |
| Ручной клепальный пресс | 1985 |
|
SU1400756A1 |
| ПАРОВАЯ КАТАПУЛЬТА С ВОЗМОЖНОСТЬЮ ПАРАЛЛЕЛЬНОГО СОЕДИНЕНИЯ, ПОСЛЕДОВАТЕЛЬНОГО СОЕДИНЕНИЯ И РАЗДЕЛЬНОГО УПРАВЛЕНИЯ | 2018 |
|
RU2691530C1 |
| Гидропривод глубинного поршневого насоса | 1976 |
|
SU663884A1 |
| ШПРИЦ С МЕХАНИЗМОМ ПРИВЕДЕНИЯ В НЕРАБОЧЕЕ СОСТОЯНИЕ | 2008 |
|
RU2464046C2 |
| Ручной пневматический одноударный молоток | 1977 |
|
SU764970A1 |
I
Изобретение относится к гидроавтоматике и может быть использовано, например, в системах промышленных роботов и манрпуляторов.
Известен цифровой привод, содержащий линии высокого и низкого давления, исполнительиый цилиндр с крышкой, выходным штоком и с набором свободно плавающих поршней, снабженных стержнями с упорами для ограничения хода, замкнутые камеры, образованные поршнями и каналы для связи с линиями высокого и низкого давления 1.
Недостатком известного привода является большие осевые габариты (длина) привода.
Цель изобретения - сокращение осевых габаритов.
Указанная цель достигается тем, что стержни выполиены полыми, причем внутренний диаметр каждого последующего стержня превышает наружный диаметр предыдущего, а в штоке и крышке цилиндра установлены трубки для подключення замкнутых камер к лннням высокого и низкого давления.
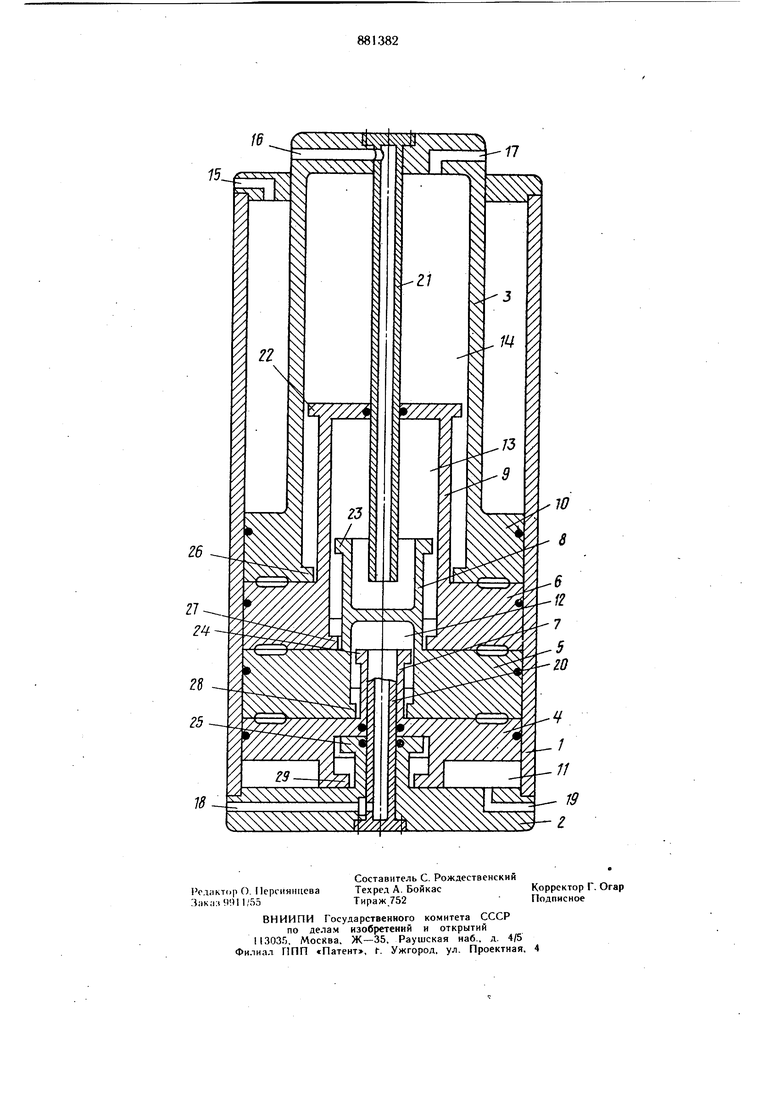
На чертеже изображен цифровой привод.
Привод содержит исполнительный цилиидр 1 с крышкой 2, полым выходным штоком 3 и с набором свободно плавающих
5 поршней 4, 5 и 6, снабженных стержнями 7, 8 и 9 соответственно, и поршнем 10,сое-, дииенным со штоком 3. Стержни 7-9 и шток 3 выполнены полыми, причем внутренний диаметр каждого последующего стержня превышает наружный диаметр предыду 0 щего, благодаря чему стержни имеют возможность проходить вовнутрь друг друга. Поршни образуют замкнутые камеры II . Каналы 15-19 служат для связи с линиями высокого и низкого давления (не изображены). В штоке 3 и крышке 2 устаl5 новлены трубки 20 и 21 для подключения замкнутых камер 12 и 13 к линиям высокого и низкого давления, иа которых имеется управляющее устройство (не изображено) для переключения командных сигналов.
30 На стержнях выполиены упоры 22, 23 и 24, кроме того, упор 25 выполнен на крышке 2, на поршнях выполнены ответные упоры 26 - 29, соответственно. 388 Принол может быть подключен как к гилра лической так и к пневматической системам. Цифровой привод работает следующим образом. Канал 15 подключается к линии высокого давления. Затем, при подаче давления в замкнутые полости 11 -14 поршни 4, 5, 6 и 10 перемещаются вверх (по чертежу) и перемещение штока 3 равно сумме перемещений 11ори1ней 4, 5, 6 и 10. В зависимоети от комбинации сигналов в каналах 15- 19 шток 3 имеет ступенчатое перемещение с максимальным числом ступеней, равным пятнадцать (в изображенном на чертеже варианте). При подаче сигнала (давления), например, в канал 17 норп1ень 10 перемещается вверх до тех пор, пока упор 26 не достигнет упора 22, после чего поршень 10 и шток 3 останавливаются. При снятии сигнала в канале 17 поршень 10 возвращается в исходное состояние (до поршня 6) под действием давления в канале 15 и т. д. Предложенный привод обеспечивает значительное уменьшение осевых габаритов привода за счет прохода стержней вовнутрь друг друга. Сокращение общей длины привода может составлять 50-100% полной величины хода выходного штока 3. Так, например, если стержень только одного пор1иня 6 вставлен в полый шток 3, а остальные выполнены со стержнями, не имеющими возможности проходить вовнутрь друг друга, то общая длина привода сокращается на 50% полной величины хода штока 3, если также стержень 8 поршня 5 вставлен в стержень 9, то общее сокращение длины привода составляет 75% хода штока 3 и т. д. В приведенной на чертеже конструкции длина припода сокращается на величину, равную полному ходу штока 3. Ксли цифровой привод содержит много поршней (до семи - десяти HIT.), то из условий простоты привода целесообразно по предлагаемой схеме выполнить три - четыре поршня с большими ходами, а остальные соединить с линиями высокого и низкого давления через гильзу цилиндра I, при этом длина привода сокращается на 75-90% длины хода штока. Применение предложенного изобретения в системах промышленных роботов и манипуляторов позволяет существенно сократить их осевые габариты и, тем, самым, расширить область их применения. Формула изобретения Цифровой привод, содержащий линии высокого и низкого давления, исполнительный цилиндр с крышкой, выходным штоком и с набором свободно плавающих поршней, снабженных стержнями с упорами для ограничения хода, замкнутые камеры, образованные поршнями, и каналы для связи с.линиями высокого и низкого давления, отличающийся тем, что, с целью сокращения осевых габаритов, стержни выполнены полыми, причем внутренний диаметр каждого последующего стержня превышает наружный диаметр предыдущего, а в штоке и крышке цилиндра установлены трубки для .подключения замкнутых камер к линиям высокого и низкого давления. Источники информации, принятые во внимание при экспертизе 1. Патент Японии № 50-27544, кл. F 15 В 11/18, 1975.
