Изобретение относится к системой автоматического контроля и преобразования перемещений в электрический сигнал, а именно к преобразователям перемещения и скорости в дискретный электрический сигнал. Известны преобразователи перемеще ния или положения объекта,например устройство для измерения положения объекта, содержащее металл-диэлектри полупроводниковую структуру, ВЫПОЛ-, ненную в виде полупроводниковой подложки со сформированиями в ней облас тями истока и стока, и подвижного затвора, отделенного от подложки ело ем жидкого диэлектрика и связанного с контролируемым объектом, а также с источником сигналов управления пос тоянного тока 1. Недостатками этого устройства являются его ограниченная чувствительность к микроперемещениям и невозмож ность измерять скорость движения объекта. Наиболее близким техническим реше нием -К изобретению является устройство для измерения положения объекта содержащее металл-диэлектрик-полупро водниковую структуру, выполненную в виде полупроводниковой подложки со сформированнь1ми в ней областями истока и стока, а также подвижного затвора, отделенного от подложки слоем жидкого диэлектрика, связанного с контролируемым объектом и с источником сигналов управления .Затвор выпол- . йен в виде нескольких жестко соединенных между собой электродов переноса заряда, а источник сигналов управления выполнен импульсным с несколькими выходами, соединенными с соответствующими электродами затвора. Количества электродов каждой фазы одинаковы 2. Недостатками известного устройства являются его неспособность измерять скорость перемещения объекта, а также ограниченный диапазон измеряемых перемещений, так как он определяется длиной областей стока и истока, которые,в свою очередь, зависят от размеров полупроводниковой подложки. Цель изобретения - расширение диапазона работы преобразователя перемещения и скорости в дискретный электрический сигнал. Поставленная цель достигается за счет того, что в преобразователь перемещения и скорости объекта в дискретный электрический сигнал, содержащий полупроводниковую подложку, у одного торца которой расположен входной затвор и исток с омическим контактом, соединенным через первый резистор с одним источником питания, у другого торца подложки расположен выходной затвор и сток с омическим контактом, соединенным с осциллографом и через второй резистор с другим источником питания, подвижную равномерную решетку электродов переноса зарядов и многофазный импульсный источник питания, введена неподвижная решетка электродов переноса заряда, расположенная в слое диэлектрика на подложке входным и выходным затворами, электроды подвижной решетки подключены к одной фазе многофазного источника питания, к другим фазам которого подключены электроды неподвижной решетки, количество электродов подвижной решетки превышает количество электродов неподвижной решетки преобразователя.
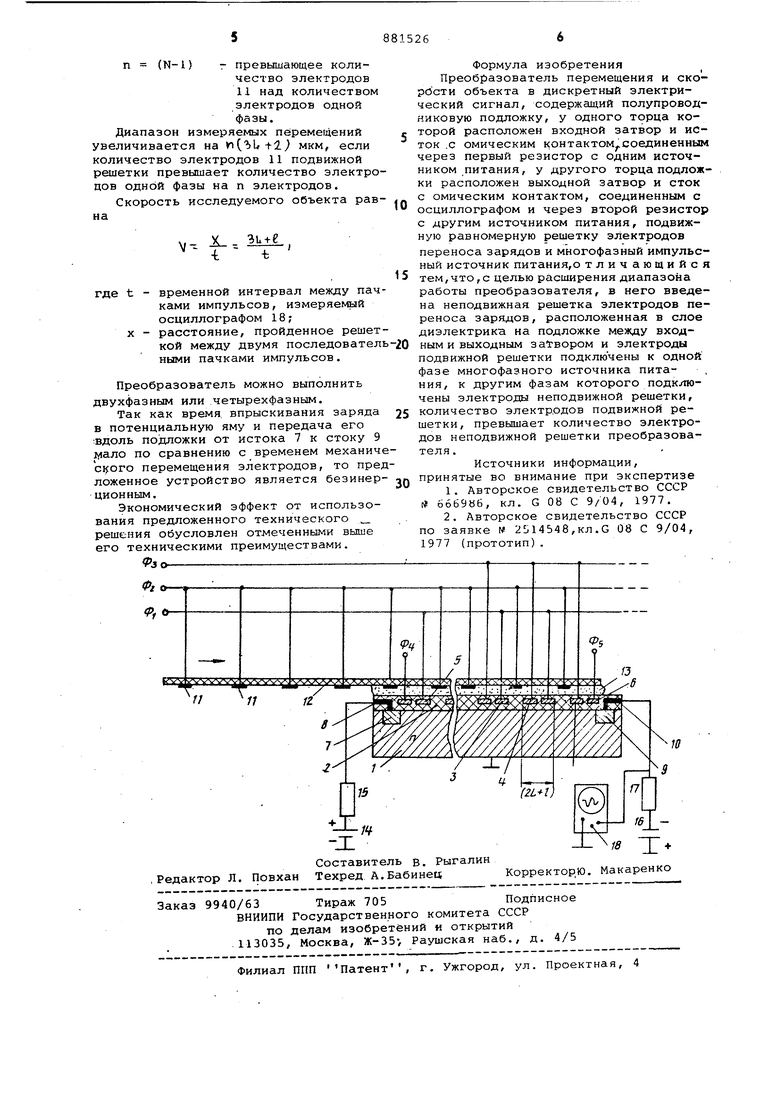
На чертеже приведено схематичное изображение преобразователя. Схема преобразователя перемещения и скорости объекта в дискретный электрический сигнал содержит полупроводниковую подложку 1 с проводимостью п-типа,покрытую слоем диэлектрика 2,в котором, находятся поликремниевые электроды 3 и 4 переноса заряда, образующие неподвижную решетку. Перед электродами 3 и 4 переноса заряда расположен входной затвор 5, а после электродов 3 и 4 переноса заряда - выходной затвор 6. Перед входным затвором 5 в полупроводниковой подложке 1 расположена входная диффузионная область р-типа проводимости - исток 7 с омическим контактом 8, а после выходного затвора 6 - выходная диффузионная область р-типа лроводимости - сток 9 с оьшческим контактом 10. Подвижная равномерная решетка представляет собой последовательность электродов 11 переноса заряда, расположенных на гетинаксовой пластине 12 параллельно друг другу и на одинаковом расстоянии ( шаге) друг от. друга, которое равно яе Ь - длина электорода переноса заряда, Е расстояние между электродами 3 и 4. Количество электродов 11 решетки превышает количе-г, ство неподвижных электродов одной фазы (например, первой фазы) по крайней мере, на единицу. Решетка выползнена с возможностью перемещения по слою жидкого глицерина 13, нанесенного на поверх ность диэлектрика 2, и связана с движущимся объектом, перемещение и скорость которого контролируются (на чертеже не показан. Перемещение решетки возможно вдоль последовательности неподвижных электродов 3 и 4,
Исток 7 подключен к одному- источнику питания 14 через резистор 15.
Сток 9 подключен к одному источнику питания 16 через резистор 17, Электроды 3, 4 и 11 переноса заряда подключены к системе трехфазного импульсного источника питания, причем элекг трод 3 к первой фазе ф , электрод 4 подключены к третьей фазе .Ф,а электрод 11 - ко второй фазе tfe. Затвор 5 подключен к источнику импульсного питания /,,а затвор 6 к источнику импульсного питания Ф5
Выходные импульсы регистрируются сциллографом 18,соединенным со стоком 9 через контакт 10.
Устройство работает следуюгцим образом.
При движении решетки слева направо по слою жидкости диэлектрика 13 электроды 11 решетки периодически занимают среднее положение между электродами 3 и 4, При этом под действием импульсных потенциалов возникает под всеми электродами в полупроводниковой подложке 1 последовательность потенциальных ям или обедненных областей, через которые передаются от истока 7 к стоку 9 пакеты зарядов, Для этого, чтобы потенциальные ямы под подвижными электродами 11 были одинаковыми по глубине с потенциальными ямами неподвижными электродами 3 и 4, потенциал ф, по абсолютной величине должен быть больше потенциалов Ф и ф,,, так как толщина диэлектрика под электродами 11 больше толщины диэлектрика под электродами 3 и .4; После передачи заряда к стоку 9 на нагрузке появляется пачка импульсов , которые регистрируются осциллографом 18 При дальнейшем движении решетки по слою диэлектрика 13 электроды 11 смещаются от среднего положения и в полупроводнике под ними образуются ямы, ширина которых уменьшается по сравнению с потенциальными ямами под электродами 3 и 4, так как электроды 3 и 4 экранируют воздействие электродов 11 на подложку 1. В результате возникает потенциальный барьер между ямами под электродами 3 и 11, Заряды не могут перетечь из одной ямы в другую, и на стоке 9 не появляются импульсы напряжения. При дальнейшем движении электроды 11 вновь занимают среднее положение между электродами 3 и 4 и на выходе преобразователя снова появляется пачка импульсов, регистрируемая осциллографом 18, и цикл повторяется снова.
Измеряемое перемещение определится как
s--(NH)(5u-t-e),
N - количество пачек
импульсов,определяемое по осциллографу 18;
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещения и скорости объекта в дискретный электрический сигнал | 1980 |
|
SU982047A1 |
| Регенератор для накопителей на приборах с зарядовой связью | 1973 |
|
SU469991A1 |
| Выходное устройство с переносом зарядов | 1986 |
|
SU1384131A1 |
| Формирователь кодированных сигналов | 1990 |
|
SU1778823A1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ФОРМИРОВАТЕЛЬ СИГНАЛОВ, КОДИРОВАННЫХ ФУНКЦИЯМИ УОЛША | 1991 |
|
RU2017347C1 |
| Преобразователь линейных перемещений | 1978 |
|
SU691678A1 |
| ПРИБОР С ЗАРЯДОВОЙ СВЯЗЬЮ | 1991 |
|
RU2023330C1 |
| Датчик малых перемещений | 1977 |
|
SU682763A1 |
| ФУНКЦИОНАЛЬНО-ИНТЕГРИРОВАННАЯ ЯЧЕЙКА ФОТОЧУВСТВИТЕЛЬНОЙ МАТРИЦЫ | 2012 |
|
RU2517917C2 |
| Ячейка оперативной памяти | 2024 |
|
RU2826859C1 |
