Изобретение относится к системам автоматического контроля и преобразования параметров движения в электрический сигнал, а именно к преобразователям Угеремещения к скбрости объекта в дискретный электрический сигнал.
Известен преобразователь перемещения объекта, содержащий металл - диэлектрик - полупроводниковую структУ ру, выполненную в виде полупроводниковой подложки со сформированными в ней областями.истоку и стока, а также подвижного затвора, отделенного от подложки слоем жидкого диэлектрика, связанного с контролируемым объектом и с источником сигналов управления. Затвор выполнен в виде нескольких жестко соединенных между собой электродов переноса заряда, а источник сигналов управления выполнен импульсным с. несколькими выходами. Соединенными с соответствующими электродами затвора. Количество электродов каждой фазы одинаково 1j.
Недостатком этого устройства является его неспособность измерять скорость перемещения объекта, а также ограниченный диапазон измеряемых перемещений.
Наиболее близким к предлагаемому является преобразователь перемещения и скорости объекта в дискретный электрический сигнал, содержа- щий полупроводниковую подложку, покрытую слоем диэлектрика, в котором расположена неподвижная решетка электродов переноса заряда с выходным и входным затворами, подключенными
10 к источникам импульсного питания, исток с омическим контактом, подключенный через первый резистор к одному источнику питания, сток с омическим контактом, подключенный к
5 осциллографу и через второй резистор к другому источнику пита)ия и подвижную равномерную решетку электродов переноса заряда, связанную с объектом и расположенную поверх не20подвижной решетки и подключенную к одной фазе многофазного иктульсного источника питания, к другим фазам которого подключены электроды неподвижной решетк;, количество электродов подвижной решетки превышает количество электродов неподвижной решетки f2.
Недостатком данного преобразователя является малая разрешакнцая
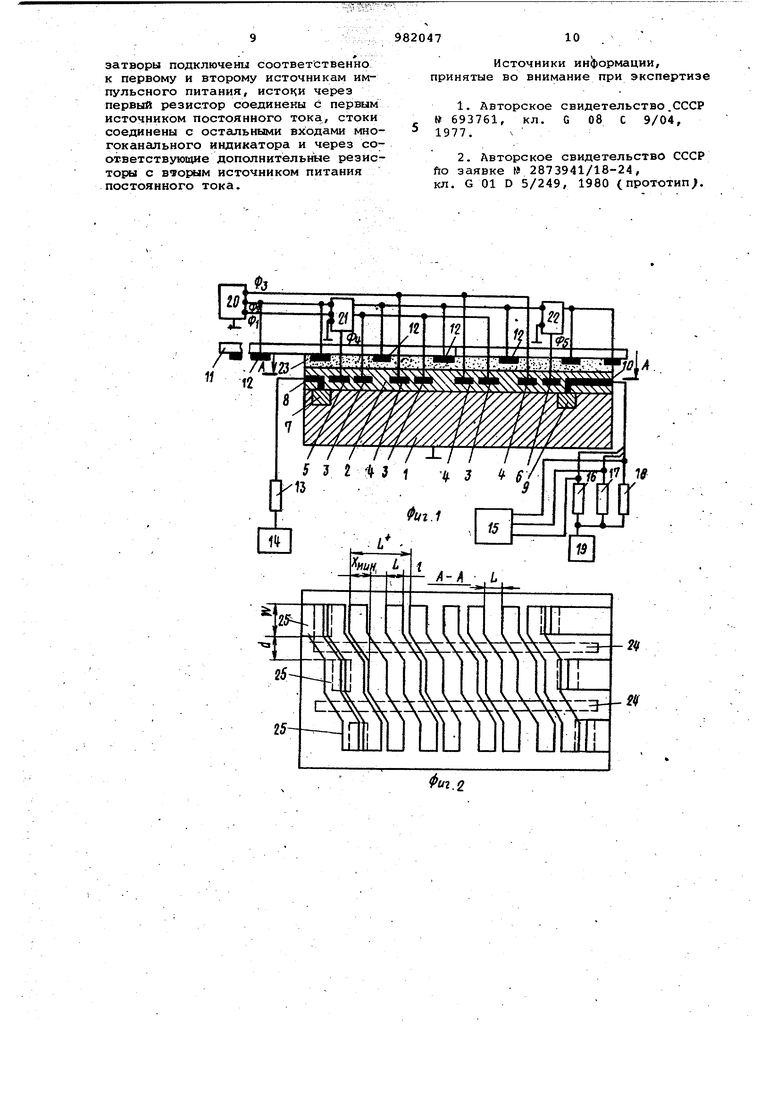
30 способность, определяемая длиной ячейки переноса заряда (для трехфазного преобразователя- 3 мкм), и невозможность определения направ ления перемещения контролируемого объекта, а следовательно, ограниченные функциональные возможности. Цель изобретения - повьпиение разрешакадей способности и расширение функциональных возможностей преобразователя за счет возможности определения направления перемещения контролируемого- объекта. Поставленная цель достигается тем, что в преобразователь, содержащий полупроводниковую подложку со слоем диэлектрика, в котором расположена основная неподвижная решетка электродов переноса заряда с входным и выходным затворами , подключенными соответственно к первому и второму источникам импульсного питания, исток с омическим контактом, подключенным через первый резистор к первому источ нику питания постоянного тока, сток с омическим контактом, подключенным к одному входу многоканального индикатора и через второй резистор к второму источнику постоянного тока,и подвижную-решетку электродов пер носа заряда,связанную с подвижным объ том и подключенную к одной фазе мно гофазного импульсного источника пи,тания, к другим фазам которого подключены электроды основной неподвиж ной решетки, введены (K-l дополнительных неподвижных решеток электро дов переноса заряда (к ,5...) (К-1) входных и выходных 3 атворов, истоков, стоков и (К-1 дополнитель ных резисторов, дополнительные неподвижные решетки электродов переноса заряда расположены в слое диэлектрика на подложке параллельно основной неподвижной решетке и смещены относительно друг друга на рас стояние, равное , где L - расстояние между одноименными боковыми гранями ближайших электродов неподвижной решетки, подключенных к одинаковой фазе лногофазного импульсного источника питания, перед каждой дополнительной неподвижной решеткой электродов переноса заряда размещены входные затвор и исток, после нее - выходной затвор и сток электроды дополнительных неподвижных решеток подключены к соответств кядим фазам многофазного импульсного источника питания, входные и выходные затворы подключены соответствен но к первому и второму источникам импульсного питания, истоки через первый резистор соединены с первым источником постоянного тока, стоки соединены с остальными входами многоканального индикатора и через со ответствующие дополнительные резисторы с вторым источником питания постоянного тока. На фиг. 1 приведено схематичное изображение преобразователя; на фиг. 2 - расположение решеток . на фиг.З - диаграмма выходных сигналов преобразователя. Предлагаемый преобразователь содержит полупроводниковую подложку 1 с .проводимостью п-типа, покрытую слоем диэлектрика 2, в котором находятся поликремниевые электроды 3.и 4 переноса заряда равных количеств, входные и выходные затворы 5 и б, истоки 7 с омическими контактами 8, стоки 9 с омическими контактами 10, подвижную решетку 11 с электродами 12 переноса заряда, первый резистор 13 и первый источник 14 постоянного тока, многоканальный индикатор 15, второй резистор 16, дополнительные резистор 17 и 18, второй источник 19 постоянного тока, многофазный импульсный источник 20 питания, первый и второй источники 21 и 22 импульсного питания. Кроме того, на фиг. 1 показан слой 23 жидкого глицерина; на фиг. 2 - изолирующие области 24 и неподвижные решетки 25. Неподвижные решетки 25 расположены параллельно друг другу и сдвинуты по входу и выходу на одинаковое расстояние, равное , где L - расстояние между одноименными боковы ми гранями .ближайших электродов переноса заряда неподвижных решеток , а К - общее количество неподвижных решеток (для преобразователя, показанного на фиг. 1. и 2, . Расстояние L выбирается из соотношения L 3L + Р , где L - длина электродов переноса заряда 3 и 4 и максимальное расстояние ; t минимальное расстояние между ними, при этом расстояния L и Е между электродами чередуются. Перед электродами 3 и 4 (фиг. 1) каждой решетки 25 (фиг. 2) в слое диэлектрика 2 расположены входные затворы 5, а после электродов - выходные затворы б. Перед входными затворами 5 в полупроводниковой подложке 1 расположены входные диффузионные обмотки р-типа проводимости истоки 7 с омическими контактами 8, а после выходных затворов 6 - выходные диффузионные области р-типа проводимости - стоки 9 с омическими контактами 10. Между решетками 25 в подложке 1 по всей длине последовательностей электродов расположены изолирующие области 24 СФиг. 2) п-типа проводимости. Поверх решеток 25 расположена подвижная решетка 11
((фиг. 1), представляющая собой последовательность прямоугольных электро дов 12 переноса заряда из алюминия, расположенных на гетинаксовой пластине параллельно друг другу и на одинаковом расстоянии (шaгe друг от друга, которое равно t2L + i), ширина электродов 12 равна (3w + 2d), где W - ширина электродов 3 и 4, а d - расстояние между решетками 25. Количество электродов 12 решетки превышает количество электродов 3 или 4 одной решетки 25 по крайней мере на единицу. Решетка 11 выполнена с возможностью перемещения вдоль последовательности электродов Э и 4 по слою 23 жидкого глицерина, нанесенного на .поверхность диэлектрика 2, И связана с движущимся объектом, перемещение и скорость которого контролируются (не показан),при этом электроды 12 остаются всегда параллельны электродам 3 и 4.
Истоки 7 через контакты 8 и через резистор 13 подключены к положительному полюсу источника 14.Стоки 9 через контакты 10 подключены к соответствующим каналам трехканального индикатора 15 (например, цшейфового осциллографа) и соответственно через резисторы 16 17 и 18 к отрицательному полюсу источника 19, электроды 3, 4 и 12 переноса заряда подключены к многофазному импульсному источнику 20 питания, причем электроды 3 - к первой фазе Ф, электроды 4 - к третьей фазе Фз, а электроды 12 ко второй фазе Фз (источник трехфазный). Затвор 5 подключен к источнику 21 импульсного питания, затвор б -к источнику 22 Импульсного питания.
Для удобства подключения к источникам питания электродаа 3 и 4 и затворы 5 и 6 выполнены сплошными (непрерывными) шинами на все три неподвижные решетки 25.
Преобразователь работает следующим образом.
При движении решетки 11 слева направо по слою жидкого диэлектрика 23 электроды 12 решетки 11 периодически занимают среднее положение между электродами 3 и 4 сначала верхней решетки 25, затем средней решетки 25 и далее нижней решетки 25. При этом под действием импульсных потенциалов Ф. , Фл, Фг возникает под всеми электродами в полупроводниковой подложке 1 последовательность потенциальных ям или обедненных областей, через которые под действием источников 14 и 19 и импульсных потенциалов Ф и Ф0. передаются от истока 7 к стоку 9 пакеты зарядов. Для того, чтобы потенциальные ямы под подвижными электродами 12 были одинаковыми по глубйне с потенциальными ямами под неподвижными электродами 3 и 4, потенциал Фд по абсолютной величине должен быть больше потенциалов Ф и Ф,,так как толщина диэлектрика под злектродамй 12 больше толщины диэлектрика под электродами 3 и 4. Области 24 в подложке 1 препятствуют перетеканию заряда между электродами разных решеток 25. После передачи заряда
к стоку 9 верхней решетки 25 на резисторе 16 появляется пачка импульсов, которые регистрируются первым каналом индикатора 15. При дальнейшем движении решетки 11 электроды 12
смещаются от среднего положения между электродами 3 и 4 верхней решетки 25, ив полупроводнике под ними образуются RNE:, ширина которых уменьшается по сравнению с потенциальными
ямами под электродами 3 и 4, так как электроды 3 и 4 экранируют воздействие электродов 12 на подложку 1. В результате возникает потенциальный барьер между ямами под электродами
3 и 12, препятствующий протеканию
заряда из одной ямы в другую, и на резисторе 16 не появляются импульсы .напряжения. При дальнейшем движении решетки 11 электроды 12 занимают среднее положение между электродами 3 и 4 средней решетки 25 и на выходе .преобразователя на резисторе появляется пачка импульсов, регистрируемая вторым каналом индикатора 15. При дальнейшем движении решетки 11
электроды 12 занимают среднее положение между электродами 3 и 4 нижней решетки 25 и на резисторе 18 появляется пачка импульсов, регистрируемая третьим каналом индикатора 15. Затем электроды 12 занимают среднее положение между электродами 3 и 4 верхней решетки 25, первый канал индикатора 15 регистрирует пачку импульсов с резистора 16
и т.д. Цикл повторяется снова .
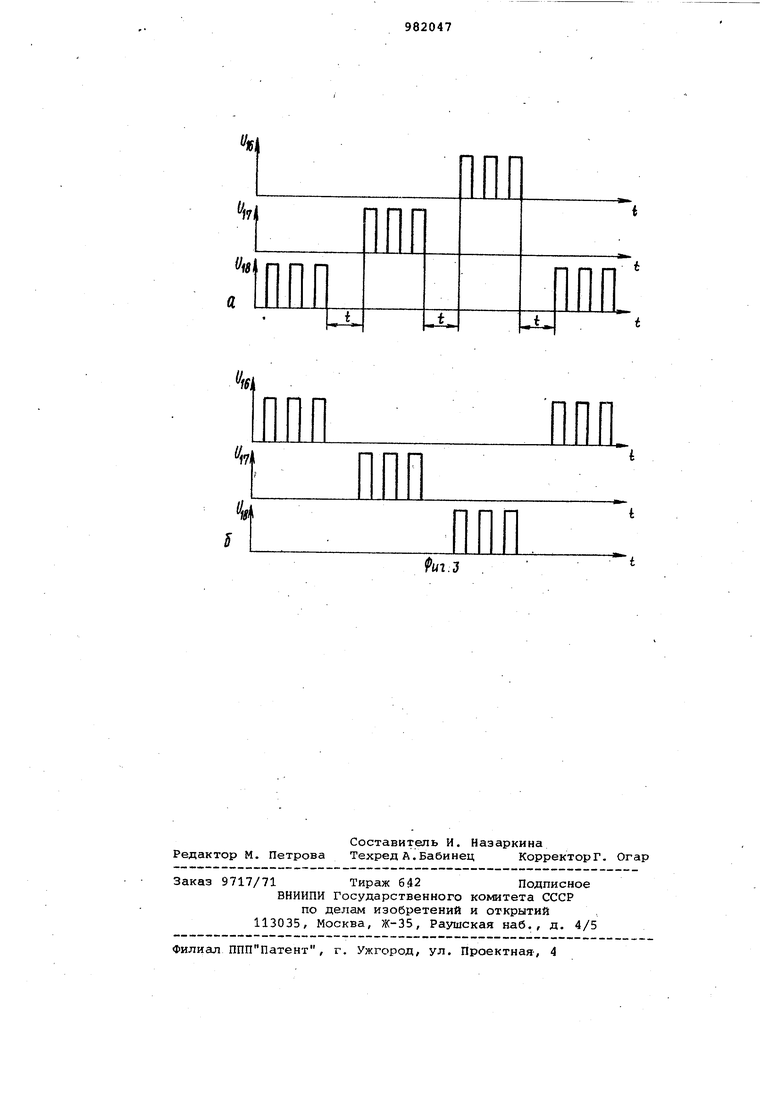
Таким образомj при движении решетки 11 пачки импульсов, возникающие на резисторах 16, 17 и 18, регистрируемые индикатором 15, оказываются
сдвинутыми во времени и в пространстве {например, на фоточувствительной ленте шлейфового осциллографа). При этом величина сдвига пачек импульсов обратно пропорциональна скорости
перемещения решетки 11, т.е. V S/t, где t - временный сдвиг между пачками импульсов с резисторов 16 и 17, или 17 и 18j или 18 и 16; S - расстояние, пройденное решеткой II межДУ временем окончания и временем . появления на индикаторе 15 соседних пачек импульсов.
Регистрируя число пачек импульсов с резисторов 16, 17 и 18 по индикатору 15, определяем перемещение У решетки 11 или контролируемого объекта X (N - 1) S, где N - число пачек импульсов с резисторов 16, 17 и 18. но S 5l4il. , тогда разрешающая способность преобразователя или минимальное переме щейие составит - 1)(ь +-|г)ь. При движении решетки 11 слева направо пачки импульсов возникают во времени и регистрируются каналами индикатора-IS в последовательнос ти пачка с резистора 18, пачка с резистора 17, пачка с резистора 16, пачка с резистора 18 и т.д. (фиг. 3 а при движении решетки 11 справа налево пачки импульсов возникают и регистрируются в последовательности: пачка с резистора 16, пачка с резистора 17, пачка с резистора 18, пачка с резистора 16 и т.д. Сфиг. 36 Таким образом, по порядку следов ния пачек импульсов предлагаемого преобразователя определяется направ ление перемещения контролируемого объекта, что позволяет применить ег в системах управления перемещением объектов. Кроме того, в преобразователе применено три неподвижных решетки 25, что позволяет получить разрешаю щую -способность по перемещению, рав ную приблизительно длине электрода .переноса заряда. Число неподвижных решеток 25 ,пре (Образователя выбирается из условия L К , где параметр X ллии определяется из Требований к преобразователям и допустимых возможностей технологии из готовления неподвижных решеток 25. Современная технология изготовле ния интегральных схем, основанная н электронао-и рентгенолитографии, им ет разрешующую способность 0,1 мкм, что позволяет расположить неподвижн решетки 25 со сдвигом относительно друг друга по входу и выходу равным ;0,1 мкм и получить разрешающую-спо собность преобразователя по перемещению, равную X л.ин 0,1 мкм, при этом число неподвижных решеток 25 (L 0,5 мкм и 0,1 мкм 1 составит К 16. Число неподвижных решеток К долж но быть больше 2, так как при К-2 невозможно определить направление перемещения объекта по порядку следования пачек импульса с двух каналов;. Преобразователь можно выполнить двухфазным или четырехфазным. Так как время передачи пакетов заряда в подложке 1 от истокак стоку 9 мало по сравнению с временем механического перемещения электродов подвижной решетки 11, то предложенный преобразователь является безынерционным. Формула изобретения Преобразователь перемещения и скорости объекта в дискретный электрический сигнал, содержащий полупроводниковую подложку со слоем диэлектрика,.в котором расположена основная неподвижная решетка электродов переноса заряда с входным и выходным затворами, подключенными к первому и второму источнику импульснрго питания, исток с омическим контактом, подключенным через первый резистор к первому источнику питания постоянного тока, сток с омическим контактом, подключенным к одному входу многоканального индикатора и через второй резистор к второму источнику постоянного тока, и подвижную решетку электродов переноса заряда, связанную с подвижным объектом и подключенную к одной фазе многофазного импульсного источника питания,к другим фазам которого подключены электроды основной неподв1ижной решетки,о т л и ч а ю щ и и с я тем, что, с.целью noisiijшения разрешающей спочобности и расширения функциональных возможностей преобразователя путем определения направления перемещения,в него введены (К 1) дополнительных неподвижных решеток электродов переноса заряда (к 3, 4, 5..., С К-1) входных и выходных затворов, истоков, стоков и (К-1) дополнительных резисторов, дополнительные неподвижные решетки электродов переноса заряда расположены в слое диэ-лектрика на подложке параллельно основной неподвижной решетке и смещены относительно друг друга на расстояние, равное , где L - расстояние между одноименными боковыми гранями ближайших электродов неподвижной решетки, под ключенных к одинаковой фазе многофазного импульсного источника питания, перед каждой дополнительной неподвижной решеткой электродов переноса заряда размещены входные затвор и исток, после нее - выходной затвор и исток, электроды дополнительных неподвижных рещеток подключены к соответствуквдим фазам/многофазного импульсного источника питания, входные и выходные
затворы подключены еоответственно к первому и второму источникам импульсного питания, истоци через первый резистор соединены с первым источником постоянного тока, стоки соединены с остальными входами многоканального индикатора и через соответствующие дополнительные резисторы с в рорым источником питания постоянного тока.
Источники ин(1)ормации, принятые во внимание при экспертизе
1.Авторское свидетельство.СССР № 693761, кл. G 08 С 9/04,
1977. ч
2.Авторское свидетельство СССР fto заявке О 2873941/18-24,
кл. G 01 D 5/249, 1980 (прототип.

| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещения и скорости объекта в дискретный электрический сигнал | 1980 |
|
SU881526A1 |
| МОП ДИОДНАЯ ЯЧЕЙКА МОНОЛИТНОГО ДЕТЕКТОРА ИЗЛУЧЕНИЙ | 2011 |
|
RU2494497C2 |
| ГЕНЕРАТОР ТЕСТОВЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ | 1990 |
|
RU2034399C1 |
| Устройство для измерения параметровдВижЕНия | 1979 |
|
SU822033A1 |
| Ячейка оперативной памяти | 2024 |
|
RU2826859C1 |
| Пленочный полевой транзистор с металлическим каналом | 2017 |
|
RU2654296C1 |
| ВЕРТИКАЛЬНЫЙ ПОЛЕВОЙ ТРАНЗИСТОР | 2009 |
|
RU2402105C1 |
| УСТРОЙСТВО ФОТОЭЛЕКТРИЧЕСКОГО ПРЕОБРАЗОВАНИЯ | 2004 |
|
RU2345502C2 |
| ЭЛЕМЕНТ ПАМЯТИ (ЕГО ВАРИАНТЫ) | 1984 |
|
SU1153769A1 |
| ВЕРТИКАЛЬНЫЕ СТРУКТУРЫ ПОЛУПРОВОДНИКОВЫХ УСТРОЙСТВ С ИСПОЛЬЗОВАНИЕМ НАНОТРУБОК И СПОСОБЫ ИХ ФОРМИРОВАНИЯ | 2005 |
|
RU2342315C2 |
%
«
п
ш
ппп
