1
Изобретение относится к вычислительной технике и предназначено для определения весовых функций объекта (устройства, системы) при поступлении на его вход единичных реализаций случайных процессов и может быть применено в системах диагностики сложных динамических объектов одноразового применения.
Известно устройство для определения весовых функций, содержащее генератор шума, блок умножения блок усреднения и фильтр 1 .
Однако в данном способе недостаточно точно определяются весовые функции.
Известно также устройство, основанное на запоминании выборок входного случайного сигнала, формировании эталонного сигнала, умножении выборок входного сигнала на эталонный сигнал, запоминании полученных произведений, формировании матрицы корреляционных функций входного сигнала, обращении этой матрицы, умножении обратной матрицы на произведение входного и эталонного сигналов. Устройство содержит счетчик входного сигнала, блоки умножения, блок формирования эталонного сигнала, блок
памяти, генератор импульсов, блок формирования матрицы корреляционных функций входного сигнала, блок обращения матрицы корреляционных функций, регистр 2.
Недостатком этого устройства является большое число операций по вычислению оптимальной весовой функции. Кроме того, устройство не может работать, если матрица корреляционных функций входного сигнала вырождена. Эта ситуация возникает в случае, когда на вход устройства поступают единичные реализации случайных процессов и как следствие этого, недостаточное быстродействие.
Цель изобретения - повышение быстродействия, а также обеспечение работоспособности устройства при определении весовых функций по единичным реализациям случайных процессов.
Поставленная цель достигается тем, что в устройство для определения весовых функций, содержащее первый накопитель, вход которого является входом устройства, выходы первого накопителя подключены к первым входам соответствующих п блоков , вторые входы которых соединены с выходом источника эталонного сигнала, выходы блоков умножения подключены к соответствующим входам второг накопителя, управляющий вход которого подключен к выходу генератора импулвсов, а выход соединен с первым входом (n--l)-ro блока умножения, выход которого соединен со входом регистра, введены функциональный преобразователь, накапливающий-сумматор и квадраторы, входы которых подключены к соответствующим выходам первого накопителя, а выходык соответствующим входам накапливающего сумматора, -выход которого через функциональный преобразователь соединен с управляющим входом генератора импульсов и вторым вхдом (п+1)-го блока усилителя.
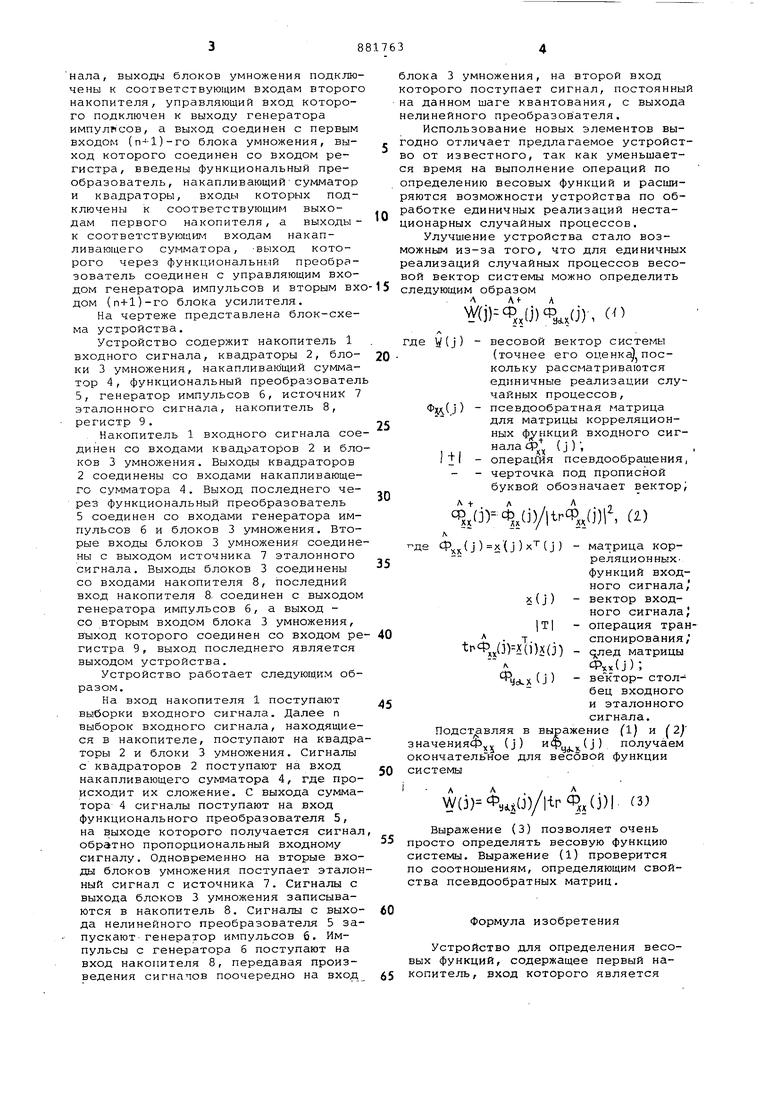
На чертеже представлена блок-схема устройства.
Устройство содержит накопитель 1 входного сигнала, квадраторы 2, блоки 3 умножения, накапливающий сумматор 4, функциональный преобразовател 5, генератор импульсов б, источник 7 эталонного сигнала, накопитель 8, регистр 9.
Накопитель 1 входного сигнала соединен со входами квадраторов 2 и блоков 3 умножения. Выходы квадраторов 2 соединены со входами накапливающего сумматора 4. Выход последнего через функциональный преобразователь 5 соединен со входами генератора импульсов б и блоков 3 умножения. Вторые входы блоков 3 умножения соединены с выходом источника 7 эталонного сигнала. Выходы блоков 3 соединены со входами накопителя 8, последний вход накопителя 8 соединен с выходом генератора импульсов б, а выход со вторым входом блока 3 умножения, Выход которого соединен со входом регистра 9, выход последнего является выходом устройства.
Устройство работает следующ.км образом.
На вход накопителя 1 поступают выборки входного сигнала. Далее п выборок входного сигнала, находящиеся в накопителе, поступают на квадраторы 2 и блоки 3 умножения. Сигналы с квадраторов 2 поступают на вход накапливающего сумматора 4, где происходит их сложение. С выхода сумматора 4 сигналы поступают на вход функционального преобразователя 5, на выходе которого получается сигнал обратно пропорциональный входному сигналу. Одновременно на вторые входы блоков умножения поступает эталонный сигнал с источника 7. Сигналы с выхода блоков 3 умножения записываются в накопитель 8. Сигналы с выхода нелинейного преобразователя 5 запускают генератор импульсов 6. Импульсы с генератора 6 поступают на вход накопителя 8, передавая произведения сигналов поочередно на вход
блока 3 умножения, на второй вход которого поступает сигнал, постоянны на данном шаге квантования, с выхода нелинейного преобразователя.
Использование новых элементов выгодно отличает предлагаемое устройство от известного, так как уменьшается время на выполнение операций по определению весовых функций и расширяются возможности устройства по обработке единичных реализаций нестационарных случайных процессов.
Улучшение устройства стало возможным из-за того, что для единичных реализаций случайных процессов весовой вектор системы можно определить следующим образом
адЦхО)4,о, с)
где y(j) - весовой вектор системьт (точнее его оценкг поскольку рассматриваются единичные реализации случайных процессов, ) псевдообратная матрица
для матрицы корреляционных функций входного сигJL.- / . .
нала ср 1, J
+ 1 операцйя псевдообращения черточка под прописной буквой обозначает вектор;
xxO)))l )
л t
Ф( j ) х{ j ) хг (j ) - матрица корреляционныХфункций входного сигнала, x(j) - вектор входного сигналаJ IT - операция тран, Л ,- Т. . спонирования/ (ЗН(1)х(Я лед матрицы
Ф%х( л
ф.
;j)
вектор- столУс Хбец входного и эталонного сигнала.
Подставляя в выражение (1) и 2)
значенияф (j) ифу (j) получаем
окончательное для весовой функции системы
W(3))/|-tri«(j)|. (3)
Выражение (3) позволяет очень просто определять весовую функцию системы. Выражение (1) проверится по соотношениям, определяющим свойства псевдообратных матриц.
Формула изобретения
Устройство для определения весовых функций, содержащее первый накопитель, вход которого является
входом устройства, выходы первого накопителя подключены к первым входам соответствующих п блоков умножения, вторые входы которых соединены с выходом источника эталонного сигнала, выходы блоков умножения подключены к соответствующим входам второго накопителя, управляющий вход которого подключен к выходу генератора импульсов, а выход соединен с первым входом (п+1)-го блока умножения, выход которого соединен со входом регистра, отличающеес я тем, что, с целью повышения быстродействия, в устройство введены функциональный преобразователь, накапливающий сумматор и квадраторы.
входы которых подключены к соответствующим выходам первого накопителя,i а выходы - к соответствующим входам накапливающего сумматора, выход которого через функциональный преобразователь соединен с управляющим входом генератора импульсов и вторым входом (п+1)-го блока умножения.
Источники информации, принятые во внимание при экспертизе
1.Корн Г. Моделирование случайных процессов на аналоговых и аналогово-цифровых машинах. М., Мир, 1968, с. 239.
2.Мизин И.А. Цифровые фильтры. М., Связь, 1979, с. 140 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения весовых функций | 1982 |
|
SU1140131A1 |
| Устройство для цифровой фильтрации | 1981 |
|
SU957416A1 |
| Устройство для идентификации | 1982 |
|
SU1038924A1 |
| Устройство для цифровой фильтрации | 1983 |
|
SU1113884A2 |
| Устройство для определения весовых функций | 1987 |
|
SU1501087A1 |
| Устройство для адаптивной обработки информации | 1981 |
|
SU976450A1 |
| Устройство для оптимальной цифровой фильтрации случайных процессов, заданных единичными реализациями | 1978 |
|
SU769552A1 |
| Устройство для оптимизации функций многих переменных | 1980 |
|
SU922761A1 |
| Устройство для прогнозирования случайных процессов | 1982 |
|
SU1120288A1 |
| УСТРОЙСТВО ДЛЯ СТАТИСТИЧЕСКОЙ ОБРАБОТКИ ИНФОРМАЦИИ | 1972 |
|
SU357565A1 |
I
