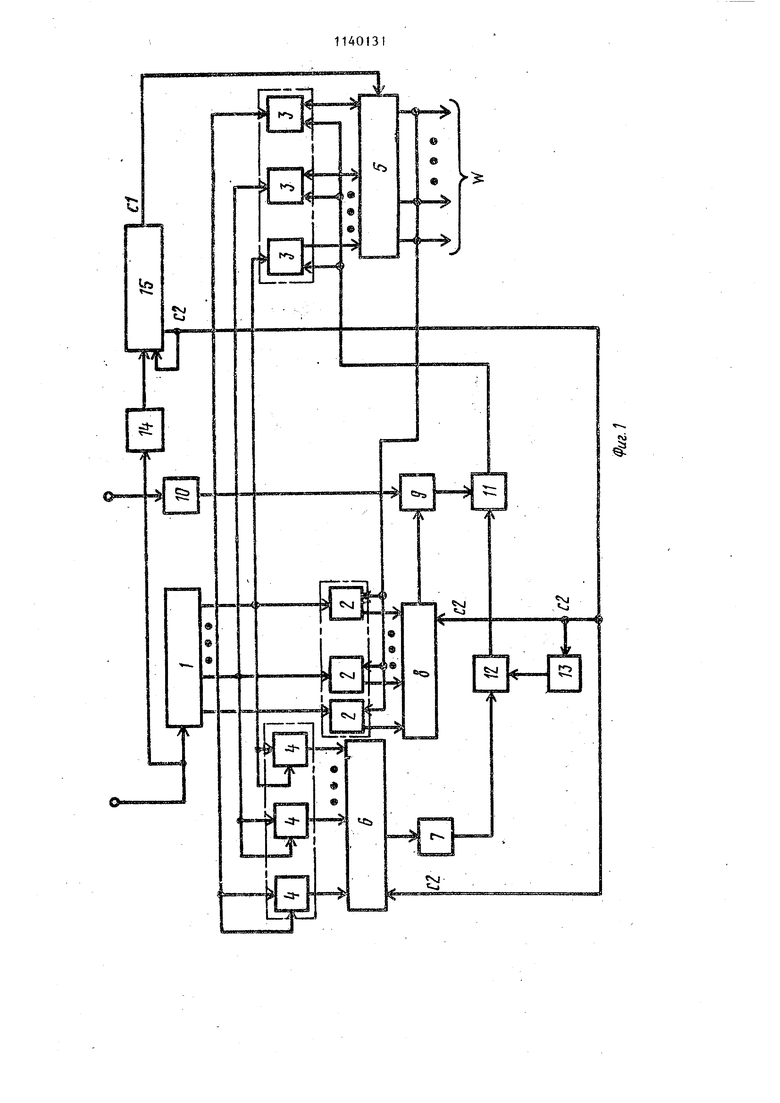
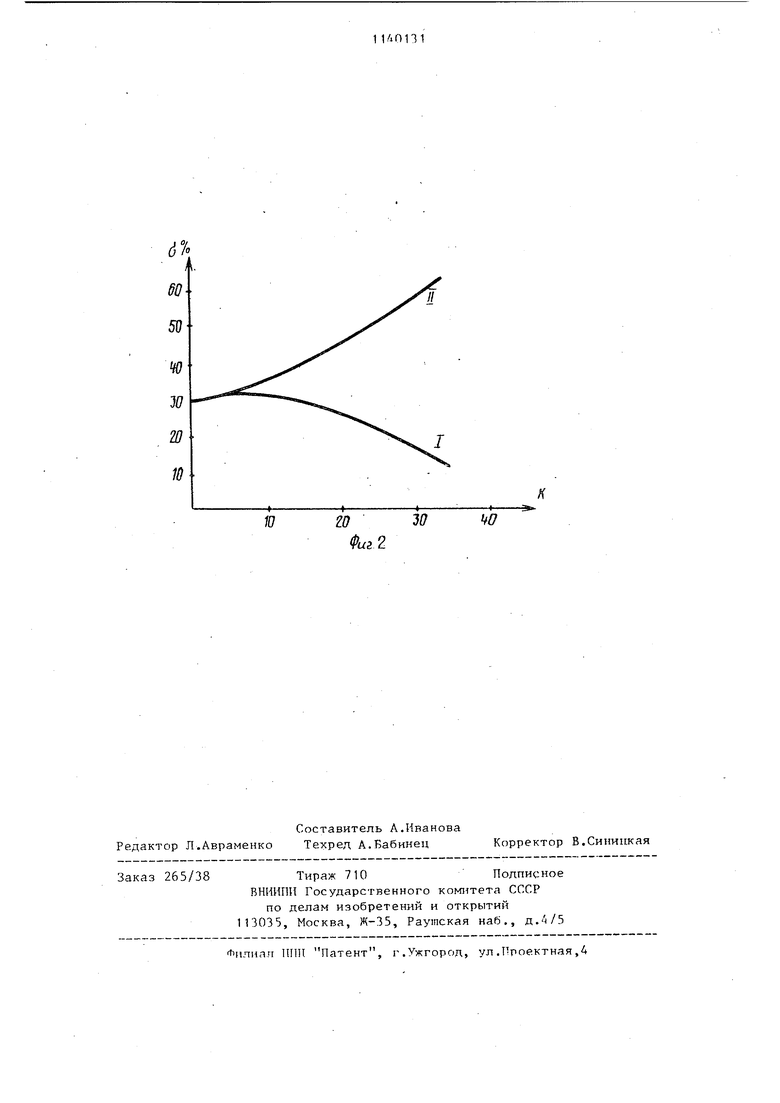
1 Изобретение относится fe вычислительной технике и предназначено для реализации его в системах диагностики сложных динамических объектов. Известно устройство для определения весовых функций, которое содержит счетчик входного сигнала, блоки умножения, блок формирования эталонного сигнала, блок памяти, генератор импульсов, блок формирования матрицы корреляционных функций входного сигнала, блок обращения матрицы корреляционных функций, регистр |jj . Недостатком известного устройства является большое число операций по вычислению оптимальной весовой функции. Кроме того, устройство не может работать если матрица корреляционных функций входного сигнала вырождена. Эта ситуация возникает, в случае, когда на вход .устройства поступают единичные.реализации случайных процессов. Наиболее близким .к предлагаемому является устройство, содержащее первый накопитель, вход которого-являет ся входом устройства, выходы первого накопителя подключены к первым входам соответствуюпр х П блоков умножения, вторые входы которых, подключены к выходам.источника зталонного.сигнала, выходы П блоков умножения подключены .к соответствующим входам второго накопителя, управляющий вход которого подключен к выходу генерато ра импульсов, а выход подключен к первым входам (n + D-ro блока, умножения,, выход которого подключен к входу регистра, а второй вход - к входу генератора импульсов и к выходам функционального, преобразователя, вход которого подключен к выходам накапливающего .сумматора, -П входов которого соединены с л квадраторами, входы которых подключены к соответствующим выходам первого накопителя 2. Недостаток известного устройства заключается, в том, что определение весовых функций осуществляется по разомкнутой схеме. Позтому невозможно оценить качество и степень приближения полученной весовой функции к реальной весовой функции объекта. В результате невозможно, организовать оптимальную.подстройку весовьзс функций к реальным весойым функциям объекта. 31 , , 2 Цель изобретения - повышение точности определения весовых функций. Указа.нная цель достигается тем, что в устройство для определения весовых функций, содержащее генератор импульсов, первый блок умножения, регистр, накопитель, первую группу блоков умножения, группу квадраторов, первый и второй входы каждого из коToi bix объединены, соединены с первыми входами одноименных блоков умножения первой группы и подключены к соответствующим выходам накопителя, вход которого является первым информационным входом устройства, выходы квадраторов группы соединены с соответствующими информационными входами первого накапливающего сумматора, выход которого соединен с входом функционального преобразователя, введены счетчик, вторая группа блоков умножения, линия задержки, блок памяти, второй блок умножения, блок суммирования, второй накапливающий сумматор, информационные входы которого подключены к вькодам соответствующих блоков умножения первой группы, вторые входы которых подключены к соответствующим выходам регистра, выход второго накапливающего сумматора соединен с первым входом блока суммирования, второй вход которого подключен к выходу линии задержки, вход которой является вторым информационным входом устройства, выход блока суммирования соединен с первым входом первого блока умножения, второй вход которого подключен к выходу второго блока умножения, первый и второй входы которого соединены соответственно с выходами функционального преобразователя и блока памяти, управляющий вход которого объединен с управляющими входами накапливающих сумматоров и установочным входом счетчика.и подключен к первому выходу счетчика а информационный- вход счетчика подключен -к выходу генератора импульсов, -вход которого соединен с входом накопителя, выходы которого соединены с первыми входами соответствующих блоков-умножения второй группы, вторые входы которых объединены и подключены к вькоду первого блока умножения, а выходы .соединены с соответствующими информаи1иoHHbiMii входами регистра, выходы которого являются соответствующими J выходами устройства, управляющий вход регистра подключен к второму вых-оду счетчика. На фиг. 1 приведена структурная схема устройства; на фиг. 2 - зависимость опшбки б между выходами модели и объекта от числа шагов.адаптации К , В данном устройстве .реали зуется процедура - подстройки весовых коэффициентов ло алгоритму НьютонаРафсона, который построен на основе критерия минимума среднеквадратичес . кой ошибки (СКО). Алгоритм определе ния вектора весовых коэффициентов имеет вид W()(5lXljl/ f 5)U); где W(i) - вектор весовых коэффициентов модели объекта Х(j) - вектор входных сигнало модели и объекта; g(j) - ошибка между выходными сигналами модели и объекта; 2т- коэффициент, определяю щий величину шага адап тации; Т - операция транспортирования;j - номер шага адаптации. Устройство для определения весовых функций содержит накопитель 1, вход которого является первын входом устройства. Выходы накопителя соединены с первыми входами блоков умножения первой группы, первыми входами блоков 3 умножения второй группы с первыми и вторыми, входами квадраторов 4 группы.. Вторые входы блоков 2 умножения первой группы соединены с соответствующими, выхода ми регистра 5. Выходы квадраторов 4 группы соединены с соответствуклдими информационными входами первого накапливающего сумматора 6., выход которого соединен с вхоДом функционального, преобразователя .7.. Выходы блоков 2 умножения первой группы соединены с соответствуюпщми входаь второго накапливающего сумматора 8, выход которого соединен с первым входом блока 9 суммирования второй вход которого соединен с выходом линии 10 задержки, вход которой является- вторым входом устройства. 31 Выход блока 9 суммирования соединен с первым входом первого блокя 11 умножения, второй вход, которого соединен с выходом второго блока 12 умножения, первый вход которого соединен с выходом функционального преобразователя 7, а второй - с выходом блока 13 памяти, выход первого блока 11 умножения соединен с вторыми входами блоков 3 умножения второй группы, выходы которых соединены с соответствующими входами регистра 5, вход генератора 14 импульсов соединен с входом накопителя 1, а выход с информационным входом счетчика 15j первый выход которого соединен с его установочным входом и управляющими входами накапливающих -сзгмматоров и блока 13 памяти. Второй выход счетчика 15 соединен с управляющим входом регистра 5, выходы которого являются соответствующими выходами .устройства Устройство работает следующим образом. . Выборки входного и выходного сигналов объекта, представляющие собой, последовательность чисел в двоичном коде, поступает на вход накопителя 1 и линии 10 задержки соответственно. Накопитель 1 представляет собой Г) каскадный сдвиговый, последовательнопараллельный регистр, линия 10 задержки - m -каскадный сдвиговый регистр, причем время D wT- выбирается таким образом, чтобы был сформирован сигнал Yj на выходе, модели (на выходе накапливающего сумматора 8) . В накопителе -1- запоминается п выборок входного сигнала. Информация с п выходов накопителя 1 поступает на первые входы первой и второй группы из и блоков 2 и 3 умножения, на входы и квадраторов 4 группы. На вторые входы Y блоков 2 умножения первой группы поступают.сигналы, пропорциональные вектору весовых функций объекта, определенному-на предыдущем шаге (или, если процесс только начался, начальные значения), с регистра 5. Регистр 5 представляет собой блок памяти с расщепленным циклом, т.е. блок, в котором может выполняться считЕявание информа1щи. без разрушения. Параллельное считывание .информации из регистра 5 осуществляется по сигналу С1 счетчика 15. Сигналы с выхода блоков 2 умножения первой группы поступают яа вход второго накапливающего сумматора 8, на выходе которого образуется сигнал подстраи ваемой модели У|. Накопитель 1, П блоков 2 умножения первой грзшпы и накапливающий сумматор 8 образуют модель объекта,-которую можно представить, в виде следующего выражения M (5U(}b - выходной сигнал модели. Ииформа1дия с накапливающего сумматора 8.считьгаается сигналом С2 и поступает на первый вход блока 9 суммирования, на второй вход которо поступает сигнал с выхода объекта, задержанный линией 10 задержки.на время 1 , необходимое для вычислени сигнала Y, , С выхода блока 9 суммирования ошибка поступае на первый вход первого -блока- 11 умножения. Сигналы с выхода квадраторов 4 поступают на входы первого на ..° . формация, считанная по сигналу С2, поступает через функциональный преобразователь 7 на первый вход второ го блока 12 умножения, на второй вход которого поступает информация, считанная с блока 13 памяти по сигналу С2, сигнал с выхода второго блока 12 умножения поступает на вто рой вход первого блока 11 умножени с выхода которого он поступает на. вторые входы блоков 3 умножения вто ро. группы. На выходе блоков 3 умно . второй группы формируются сиг Hai(, уточняющие вектор весовых коэф циентов на каждом шаге адаптаци1 . bVilsH ul/li 5(lil) Величина шага адаптацш 2, nj определяется заранее и хранится в блоке памяти. ВеличинуХ( V(j) получаю на выходе первого, накапливающего сумматора 6. Далее эта.величина поступает на вход функциЬнального преобразователя 7, который выполня ет операцию деления / liix(i1. Сигналы с.выхода блоков 3 умножени поступают-на вход регистра 5, где 316 суммируются.с предыдущим значением вектора весовых коэффигщентов. Регистр. 5 предназначен для хранения вектора весовых коэффи1Ц1ентов - начальных, если процесс только что начался,или полученных в процессе идентификации путем суммирования вектора весовых коэффициентов W(), полученных на предьщущем шаге идентификации с добавкой iW (j-fl) , полученной на.последнем шаге адаптации. По сигналу С2 осуществляется сброс счетчика 15. На информационный вход счетчика 15 поступают сигналы от генератора 14 импульсов, который запускается входным сигналом (j). Разрядность счетчика 15 выбираетсятаким образом, что сигнал С1 появляется на выходе счетчика 15 практически сразу после прихода очередной выборки входного сигнала на накопитель 1, а сигнал С2 появляется только после Toroj как в накапливающем сумматоре 8 будет сформирован сигнал подстраиваёмоГмодёлГУм послё сброса счетчика 15 устройство готово к приему новой информации; Сигналы с выхода блоков 3 умножения поступают на вход регистра 5, где суммируются с предыдущим значением векторавесовой функции.- По сигналу С2 осуществляется сброс счетчика 15. Устройство готово к приему новой информации. Предлагаемое устройство выгодно отличается от базового устройства, принятого за прототип, так как в базовом устройстве реализуется пряМОЙ метод нахождения весовых функций объекта. Это не позволяет контролировать степень приближения получаемого вектора весовых коэффициентов к его текущему значению. В результате ошибка в определении весовых функций может неограниченно возрастать. Для исключения этого эф-фекта в предлагаемом устройстве реализован замкнутый контур самонастройки вектора весовых функций. При этом для реализации контура подстройки весов модели используется текущая ошибка между выходом модели и выходом объекта 6 N -Yw Использование, замкнутого- контура самонастройки-позволяет .уменьшить 7 ошибку между выходом модели и вЫходом объекта (кривая I на Лиг. 2) по сравнению с базовым объектом, в ко11401318тором ошибка 6 с увеличением .колнчества шагов адапта ции If стремится к бесконечности (кривая П на фиг,2).
d%
SO50
W W W W


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для идентификации | 1982 |
|
SU1038924A1 |
| Устройство для адаптивной обработки информации | 1981 |
|
SU976450A1 |
| Устройство для определения весовых функций | 1987 |
|
SU1501087A1 |
| Устройство для определения весовых функций | 1980 |
|
SU881763A1 |
| Устройство для прогнозирования случайных процессов | 1982 |
|
SU1120288A1 |
| Адаптивный цифровой измеритель параметров сигнала | 1981 |
|
SU1013867A1 |
| Устройство для прогнозирования надежности по результатам ускоренных испытаний | 1987 |
|
SU1508238A1 |
| Устройство для статистической обработки информации | 1980 |
|
SU942043A1 |
| УСТРОЙСТВО ДЛЯ НАХОЖДЕНИЯ ЭКСТРЕМУМА АДДИТИВНОЙ ФУНКЦИИ МНОГИХ ПЕРЕМЕННЫХ С ОГРАНИЧЕНИЕМ НА НОРМУ АРГУМЕНТОВ | 1991 |
|
RU2050589C1 |
| Устройство для цифровой фильтрации | 1983 |
|
SU1113884A2 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСОВЫХ ФУНК1ЩЙ, содержащее генератор импульсов, первый блок умножения, регистр, накопитель, первую группу блоков умножения, группу квадраторов, первый и второй входы каждого из которых объединены, соединены с.первыми входами одноименных блоков умножения первой группы и подключены к соответствующим выходам накопителя, вход которого является первым информационным входом устройства, выходы квадраторов группы соединены с соответствующими информационными входами первого накапливающего сумматора, выход которого соединен с входом функционального преобразователя, о.т ли чающе е с я тем, что, с целью повьппения точности определения весовьпс .функций, в него введены счетчик,- вторая группа блоков умножения, линия задержки, блок памяти, второй,блок умножения, блок суммирования, второй накапливающий сумматор, информационные входы которого подключены к выходам соответствующих блоков умножения первой группы, вторые входы которых подклю- чены к соответствуюп1им выходам регистра, выход второго накапливающего сумматора соединен с первым входом блока суммирования, второй вход которого подключен к выходу линии задержки, вход которой является.вторым информационным входом устройства, выход блока суммирования соединен с первым входом первого блока умножения, второй вход которого подключен к выходу второго блока умножения, первый и второй входы которого соединены соответственно с выходами сл функционального, преобразователя и блока памяти, управляющий вход которого объединен- с управляющими входами накапливающих сумматоров и установочным входом счетчика и подключен к первому выходу счетчика, а информационный вход счетчика подключен к выходу генератора импульсов, вход которого соединен-с входом накопитеJi ля, выходы которого соединены с перО выми входами соответствующих блоков умножения второй группы, вторые вхо:/д ды которых объединены и подключены к выходу первого блока умножения, а выходы соединены с соответствующими информационными .входами регистра, выходы которога являются.соответствующими- выходами устройства, управляющий вход регистра подключен к второму вькоду счетчика.
Ю
zo
W
W
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Цифровые фильтры | |||
| М., Связь, 1979, с | |||
| Способ закалки пил | 1915 |
|
SU140A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
