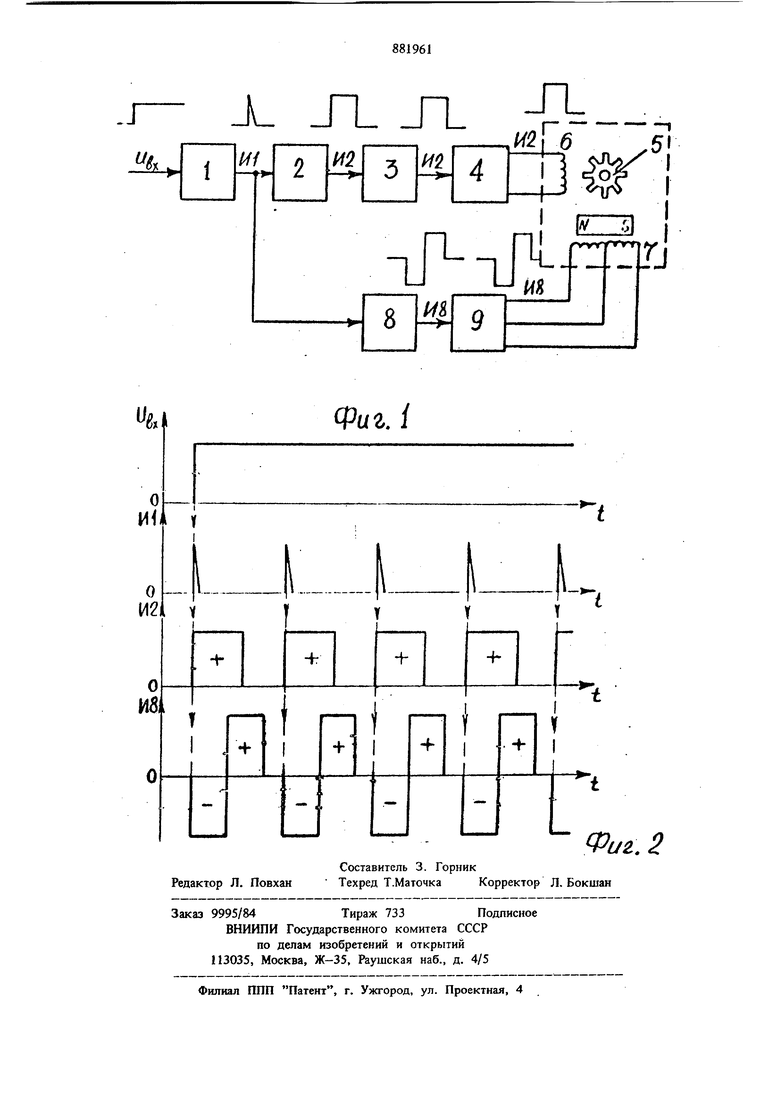
Изобретение относится к электротехнике н может быть использовано для управления одн фазными шаговыми электродвигателями с маг нитной фиксацией ротора. Известен способ управления однофазным шаговым электродвигателем путем подачи на обмотку управления знакопеременных импульсов напряжения (1 . Недостатком указанного способа является низкое качество движения при обработке шага. Наиболее близким по технической сущности к предлагаемому является способ управления однофазным шаговым электродвигателем с магнитной фиксацией путем подачи импульсов напряжения на обмотки управления и компенсации 2. Недостатком этого способа является низкая нагрузочная способность двигателя, так как импульс на дополнительной компенсирующей обмотке действует на время движения ротора двигателя только в качестве компенсатора момента фиксации двигателя. Цель изобретения - повышение нагрузочной способности двигателя. Поставленная цель достигается тем, что после поворота ротора двигателя на угол, близкий к половине шага, изменяют полярность импульса напряжения на обмотке компенсации. Формирование импульса противоположной полярности и подача его на обмотку компенсации в момент окончания компенсирующего импульса приводит к догголнительному увеличению полезного момента, развиваемого nfaговым двигателем, за счет того, что происходит увеличение момента фиксации двигателя во второй половине шага двигателя, где момент фиксации (согласно кривой статического синхронизирующего момента однофазного гармонического шагового электродвигателя) уже участвует в создании полезного крутящего момента двигателя. На фиг. 1 приведена блок-схема устройства, реализующего способ; на фиг. 2 - временные диаграммы импульсов управления и солшенсации. Устройство (фиг. 1), реализующее предлагаемый способ, включает преобразователь 1 непрерывного сигнала UBX в частотно-модули рованную последовательность импульсов напряжения, формирователь импульсов 2, преоб разующий входные иг пульсы произвольной формы в прямоугольные импульсы требуемой длительности, распределитель 3 импульсов управления, усилитель мощности 4 и шаговый двигатель 5 с обмотками управления 6 и компенсации 7, а также формирователь 8 парных разнополярных импульсов компенсащ1 и усилитель мощности 9. Входы формировате лей импульсов 2 и 8 подключены к выходу преобразователя 1. Способ осуществляется следующим образом При поступлении входного напряжения UBX (фиг. 1) на вход преобразователя 1 последний преобразует это напряжение в частотномодулированную последовательность импульсов И 1 (фиг.2). Далее эти импульсы поступают одновременно на формирователи прямоугольных импульсов 2 и 8, первый из которых формирует импульс И 2, необходимый для нормальной работы щагового двигателя 5, а второй формирует на каждый импульс преоб разователя 1 одну пару разнополярных компенсирующих импульсов и 8 (фиг. 2У, причем первый из них, противоположный по полярности импульсу управления (полярности импульсов отмечены знаками и - на фиг. 2), поступает на обмотку компенсадии одновременно с импульсом управления, а второй формируется сразу после окончания этого импульса, но с противоположной поляр ностью, и подается в ту же обмотку компен сации 7. Для оптимальной работы щагового двш-ателя требуется, чтобы период следования импульсов И 1 преобразователя не был меньше периода следования парных импульсов компенсащ1и И 8. Импульсы И 2 затем поступают через распределитель 3 (в случае двухтактного щагового двигателя) и усилитель мощности 4 на обмотку управления 6 двигателя 5. Импульсы И 8 через усилитель мощности 9 поступают на обмотку компенсации 7, выполненную, например, из двух полуобмоток со. средней точкой и размещаемую на фиксирую uieM полюсе двигателя 5, содержащего посто янный магнит N-S Шаговый двигатель работает следующим о разом. При обесточенной обмотке управления 6 обмотке компенсации 7 ротор двигателя 5 фиксируется потоком постоянного магнита N-S. При поступлении первого импульса И I4 и пары импульсов И 8 происходит сначала компенсация потока постоянного магнита, фиксирующего ротор двигателя, так как постоянная времени обмотки компенсации вьгбирается меньще постоянной времени обмотки управления, а затем импульс И 2 создает электромагнитный поток, приходящий к перемещению ротора. Ротор поворачивается на угол, равный половине шага. После окончания импульса И 2 ротор продолжает перемещение в направлении вращения под, ускоряющим воздействием положительной полуволны компенсирующего импульса И 8, который подается в другую полуобмотку компенсадии 7, изменяя тем самым направление магнитного потока. Таким образом, увеличивается полезный пусковой момент двшателя, так как скомпенсированный момент фиксации двигателя входит в характеристику статического синхроннзирующего момента в начальный момент со знаком -, а во второй половине щага - со знаком +. После окончания импульса И 8 ротор двига теля фиксируется в новом положении, смещенном на один шаг. Таким образом, увеличение развиваемого двигателем полезного момента происходит за счет того, что в обмотку компенсации подается в момент окончания компенсирующего импульса импульс противоположной полярности, который увеличивает фиксирующий момент двигателя во второй половине шага двигателя. Нагрузочная способность двигателя повышается при этом на 20-30%. Формула изобретения Способ управления однофазным шаговым электродвигателем с магнитной фиксацией путем подачи импульсов напряжения на обмот ку управления и компенсации, отличающийся тем, что, с целью повышения нагрузочной способности двигателя, после поворота ротора двигателя на- угол, близкий к половине шага, изменяют полярность им,пульса напряжения на обмотке компенсации. Источники информации, принятые во внимание при экспертизе 1.Дискретный электропривод с шаговыми двигателями. Под ред. М. Г. Чиликина, М., Энергия, , с. 535-537. 2.Авторское свидетельство СССР № .629610, кл. Н 02 К 37/00, 1976 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Однофазный нереверсивный шаговый электродвигатель | 1980 |
|
SU871286A1 |
| Однофазный шаговый электродвига-ТЕль | 1979 |
|
SU811428A1 |
| ФИКСАТОР ПОЛОЖЕНИЯ РОТОРА ШАГОВОГО ДВИГАТЕЛЯ | 1965 |
|
SU170102A1 |
| Однофазный нереверсивный шаговый электродвигатель | 1976 |
|
SU629610A1 |
| Дискретный электропривод | 1977 |
|
SU720659A1 |
| Однофазный нереверсивный шаговый электродвигатель | 1978 |
|
SU712905A1 |
| Способ старт-стопного управления шаговым электродвигателем | 1980 |
|
SU902194A1 |
| Способ торможения шагового электродвигателя и устройство для его осуществления | 1982 |
|
SU1032585A1 |
| Устройство для определения статического момента однофазного магнитоэлектрического шагового двигателя | 1983 |
|
SU1091296A1 |
| Шаговый электродвигатель | 1987 |
|
SU1826109A1 |