2. Устройство для осуществления способа по п. 1, содержащее коммутатор, усилители мощности, счетчик, датчик положения и формирователь импульсов торможения, отличающееся тем, что введены элемент запрета и блок отключения обмоток, а формирователь импульсов торможения снабжен дополнительным выходом,
подключенным к управляющему входу блока отключения обмоток, информационные входы которого соединены с выходами коммутатора, а выходы - с входами усилителей мощности, причем вход коммутатора связан с выходом элеме|1та запрета, два входа которого подключены к выходам датчика положения и счетчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым двигателем | 1989 |
|
SU1721783A1 |
| Устройство для проверки синусно-косинусных вращающихся трансформаторов | 1980 |
|
SU924738A1 |
| Устройство для управления шаговым двигателем | 1984 |
|
SU1233258A1 |
| Устройство для управления вентильнымэлЕКТРОдВигАТЕлЕМ | 1979 |
|
SU843121A1 |
| Устройство для торможения бесконтактного двигателя постоянного тока | 1979 |
|
SU972633A1 |
| Способ старт-стопного управления шаговым электродвигателем | 1980 |
|
SU902194A1 |
| Устройство для управления вентильным электродвигателем | 1982 |
|
SU1053232A2 |
| Устройство для торможения бесконтактного двигателя постоянного тока | 1981 |
|
SU1020952A1 |
| Дискретный электропривод со стабилизацией скорости | 1983 |
|
SU1108601A1 |
| Устройство для автоматического управления насосным агрегатом | 1988 |
|
SU1551828A2 |
1. Способ торможения шагойого электродвигателя в режиме самокомму1/ДПР тации от датчика положения, установленного на валу двигателя, путем включения обкюток, соответствующих положению фиксации, отличающийся тем, что, с целью умень;шения колебаний и повышения быстродействия при перемещении на произвольном числе шагов, обмотки., соответствующие положению фиксации, включают после отработки предпоследнего :шага через временной интервал, равный четверти периода собственных колебаний ротора, на время, меньшее предыдущего интервала, затем отключают : на время, большее первого интервала после чего вновь включают. ys
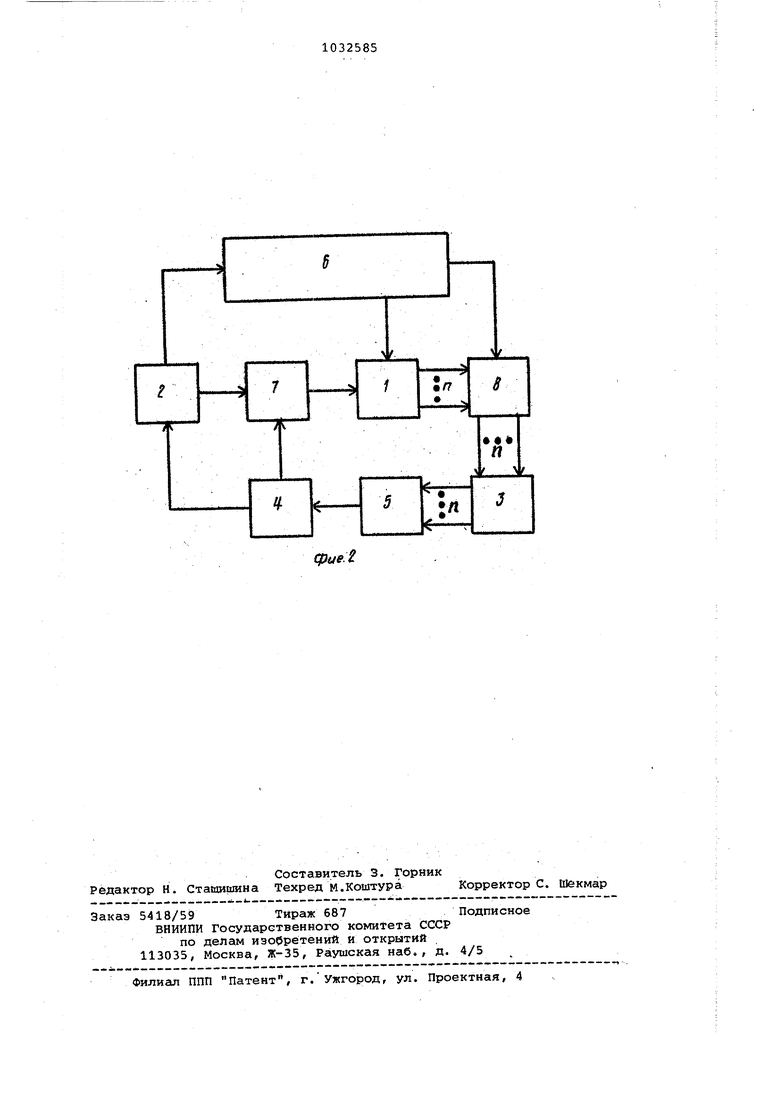
Изобретение относится к электротехнике, в частности к управлению щаговым двигателем, и может быть использовано в устройствах автомати ки и телемеханики, вычислительной техники, станках с программным управлением. Известен способ торможения шагового двигателя путем включения и коммутации обмоток по сигналу обрат ной связи С11Наиболее близким к предлагаемому по технической сущности является способ торможения шагового двигателя в режиме самокоммутации от дат |чика положения, установленного на валу двигателя, путем включения обм ток, соответствующих положению фик сации 21. Недостатком известных способов и устройств для их осуществления является то, что они обеспечивают Оптимальное управление на строго определенной неизменной группе шагов. Если же число шагов в единич ном перемещении является произвольным, то колебания ротора не устраняются. Это приводит к увеличению динамического цикла работы привода и соответствующему снижению быстродействия. Цель изобретения - уменьшение колебаний ротора и повышение быстро действия при перемещении на произвольное число шагов в режиме самокоммутации от датчика положения, установленного на валу двигателя. Поставленная цель достигается тем, что согласно способу торможения шагового электродвигателя в режиме самокоммутации от датчика положения, установленного на валу двигателя,- путем включения обмоток соответствующих положению фиксации последние включают после отработки предпоследнего шага через временной интервал, равный четверти периода ственных колебаний ротора, на время меньшее предыдущего интервала, зате отключают на время, большее первого интервала, после чего вновь включаю Кроме того, в устройство для осуществления способа, содержащее коммутатор, усилители мощности, датчик положения и формирователь импульсов торможения, введены элемент запрета и блок отключения обмоток, а формирователь импульсов торможения снабжен дополнительным выходом, подключенным к управляющему входу блока отключения обмоток, информационные входы которого соединены с выходами коммутатора, а выходы - с входами усилителей мощности, причем вход коммутатора связан с выходом элемента запрета, два входа которого подключены к выходам датчика положения и счетчика. Такое управление двигателем позволяет устранить колебания ротора при любом числе отрабатываемых шагов в широком диапазоне скоростей движения ротора при его подходе к позиции фиксации. На фиг,. 1 приведены временные диаграмхиы, поясняющие действие способа торможения; на фиг. 2 - функциональная схема устройства. Сущность способа заключается в следующем. После отработки предпоследнего шага в момент прихода сигнала с датчика положения Unnp осуществляют задержку включения обмоток, соответствующих заданному положению фиксации. Время задержки Т1 устанавливают равным четверти периода собственных колебаний системы, состоящей из двигателя и нагрузки. В конце ин.тервала Т1 по сигналу Uynp (фиг. i; включают обмотки, соответствующие позиции фиксации, на время Т2, меньшее Т1, но не равное .нулю. По окончании времени Т2 обмотки двигателя обесточивают по сигналу Ьупр на время ТЗ, большее Т1. После окончания ТЗ по сигналу обмотки вновь включают. В течение интервала Т1 ротор движется по инерции в поле электромагнитных сил, создаваемых обмотками, включенными на. предпоследнем шаre. В конце интервала Tl ротор имеет наибольшую амплитуду выбега и нулевую скорость, т.е. (фиг. 1 ). В этот момент ему сообщается энергия, необходимая для даль нейшего движения в позицию фиксации, путем включения на время Т2 обмоток, соответствующих позиции фиксации. В связи с тем, что дальнейшее движения ротора будет происходить в поле сил трения при обесточенных обмотках, количество энергии, сообщаемое ротору за время Т2, должно быть пропорционально оставшемуся расстоянию до позиции фиксации. Это условие достаточно точно выполняется при постоянном значении--, интервала Т2 вследствие закона распределения статического синхронизирующего, момента в зоне выбега ротора, Таким образом, чем дальше ротор находится от позиции фиксации, тем большую скорость он приобретает за время разгона на интервале Т2. Поэтому оставшееся расстояние до позиции фиксации он проходит при обесточенных обмотках независимо от его величины за одинаковое время ТЗ.
В конце интервала ТЗ при приближении ротора к позиции фиксации со скоростью, близкой к нулю (0 0), включают обмотки, соответствующие позиции фиксации, и ротор устанавивается в позиции фиксации практически без колебаний.
Величины временных интервалов Т2 и ТЗ определяют экспериментальным или расчетным путем из условия баланса кинетической энергии, сообщаемой ротору за время Т2, и энергии, затрачиваемой на преодоление сил трения при движения ротора о позиции фиксации за время ТЗ.
Интервалы времени Т1, Т2 и ТЗ ЯВЛЯЮТСЯ постоянными для данного привода, не зависят от числа отрабатываемых шагов и определяются величиной статического синхронизирующего момента двигателя, моментом инерции системы и моментом трения.
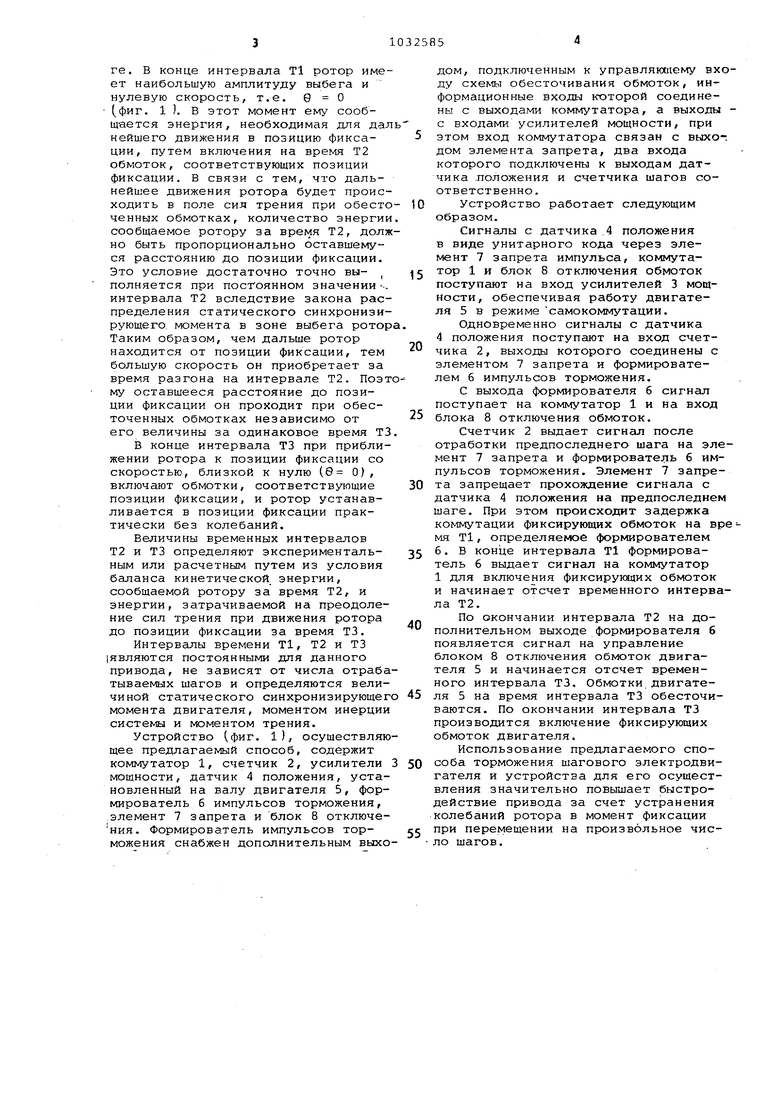
Устройство (фиг. 1), осуществляющее предлагаемый способ, содержит коммутатор 1, счетчик 2, усилители 3 мощности, датчик 4 положения, установленный на валу двигателя 5, формирователь б импульсов торможения, элемент 7 запрета и блок 8 отключения. Формирователь импульсов торможения снабжен дополнительным выходом, подключенным к управляющему входу cxeNibi обесточивания обмоток, информационные входы которой соединены с выходами коммутатора, а выходы с входами усилителей мощности, при этом вход коммутатора связан с выхо-, дом элемента запрета, два входа которого подключены к выходам датчика .положения и счетчика шагов соответственно.
0
Устройство работает следующим образом.
Сигналы с датчика 4 положения в виде унитарного кода через элемент 7 запрета импульса, коммутатор 1 и блок 8 отключения обмоток
5 поступают на вход усилителей 3 мощности, обеспечивая работу двигателя 5 в режиме самокоммутадии.
Одновременно сигналы с датчика 4 положения поступают на вход счет0чика 2, выходы которого соединены с элементом 7 запрета и формирювателем б импульсов торможения.
С выхода формирователя 6 сигнал поступает на коммутатор 1 и на вход
5 блока 8 отключения обмоток.
Счетчик 2 выдает сигнал после отработки предпоследнего шага на элемент 7 запрета и формирователь 6 импульсов торможения. Элемент 7 запре0та запрещает прохождение сигнала с датчика 4 положения на предпоследнем шаге. При этом происходит задержка коммутации фиксирующих обмоток на время Т1, определяемое формирователем 6. В конце интервала Т1 формирова5тель 6 выдает сигнал на коммутатор 1 для включения фиксирукяцих обмоток и начинает отсчет временного интервала Т2.
По окончании интервала Т2 на до0полнительном выходе формирователя 6 появляется сигнал на управление блоком 8 отключения обмоток двигателя 5 и начинается отсчет временного интервала ТЗ. Обмотки двигате5ля 5 на время интервала ТЗ обесточиваются. По окончании интервала ТЗ производится включение фиксирующих обмоток двигателя.
Использование предлагаемого способа торможения шагового электродви0гателя и устройства для его осуществления значительно повышает быстродействие привода за счет устранения колебаний ротора в момент фиксации при перемещении на произвольное чис5ло шагов.
gjtte:
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU243009A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дискретный электропривод с шаговыми двигателями | |||
| Под ред | |||
| М.Г | |||
| Чиликина | |||
| М., Энергия, 1971, с | |||
| ВРАЩАТЕЛЬНЫЙ АППАРАТ С ТУРБИННЫМ ДВИГАТЕЛЕМ ДЛЯ ГИДРАВЛИЧЕСКОГО БУРЕНИЯ СКВАЖИН | 1922 |
|
SU546A1 |
