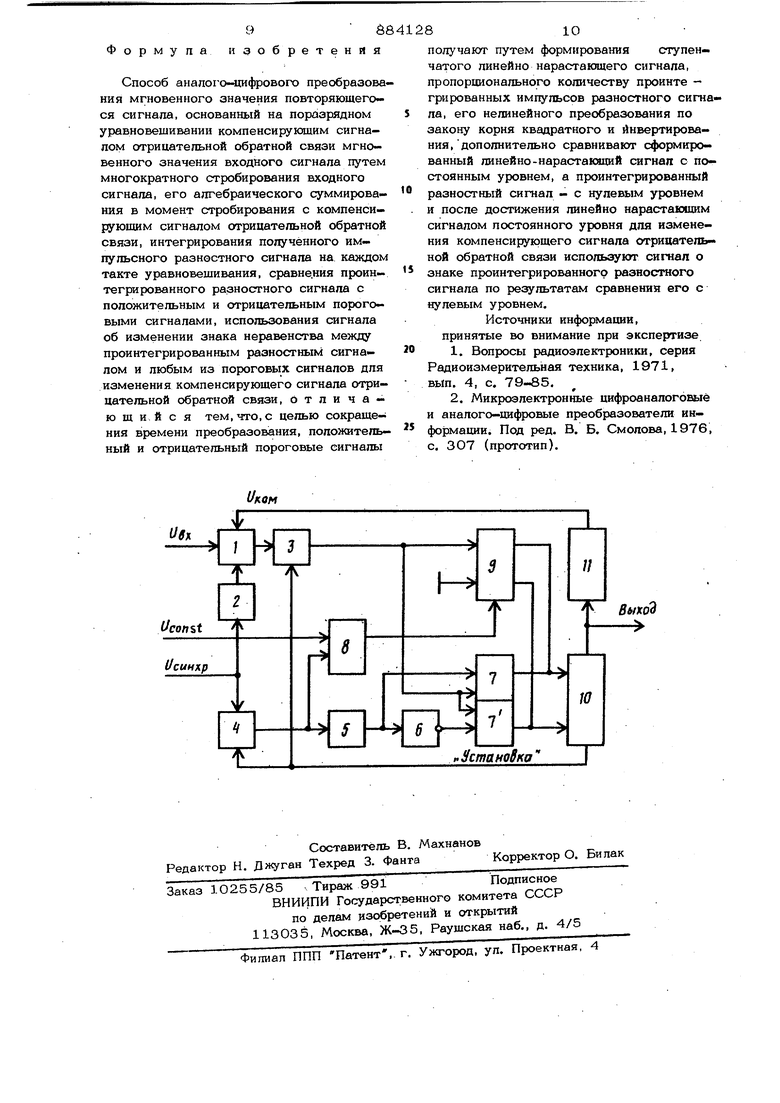
388 порциональное общему числу стробирований. Это обусловлено тем, что число суммпруемых кодов выбирают постоянным из расчета макстлмально возможной, величи ны шума, т.е. не учитывают истинную ве-личину шума, а таюке изменение отношения величины разности между мгновенным значением входного и компенсирующим сигналами к истинной величине шума в процессе уравновешивания. Наиболее близким к изобретению по технической сущности является способ основанный на поразрядном уравновешивании компенсирующим сигналом отрицательной обратной связи мгновенного значения вход ного сигнала путем многократного стробирования входного сигнала, его алгебра ического суммирования в момент строби- рования с компенсирующим сигналом отрицательной обратной связи, интегрирования полученного импульсного разностного сигнала на каждом такте уравновешивания, сравнения проинтегрированного разностного сигнала с положительным и отрица тельным пороговыми сигналами и использования сигнала об изменении знака неравенства между проинтегрированным разностным сигналом и любым из пороговых сигналов для изменения компенсирующего сигнала отрицательной обратной связи Присутствующие при измерении шумы аддитивно смешиваются с входным, компенсирующим и разностным сигналами. В результате амплитуды отдельных импульсов разностного сигнала изменяются случайным образом и на некоторых тактах уравновешивания импульсный разност- ный сигнал становится знакопеременным. Вероятность правильного определения зна ка истинной амплитуды разностного сигна ла на всех тактах уравновешивания увели чивают методом накопления разностного сигнала. Минимальное значение этой вероятности задают с помощью амплитуды пороговых сигналов 1 2 . Однако время, необходимое для преобразования, остается достаточно большим и число стробирований на каждом такте уравновешивания обратно пропорционально истинной амплитуде разностного сигнала на этом такте. Цепь изобретения - сокращение време ни преобразования. Поставленная цель достигается тем, что согласно способу аналого-цифрового преобразования мгновенного значения повторяющегося сигнала, основанному на поразрядном уравновешивании компенсирующим сигналок отрицате УШНОЙ обратной ВЯЗИ мгновенного значения входного сигала, путем многократного стробироадния ходного сигнала, его алгебраического уммирювания в момент стробирования с омпенсирующим сигналом отрицательной братной связи, интегрирования полученого . импульсного разностного сигнала на аждом такте уравновешивания, сравнения роинтегрированного разностного сигнала с положительным и отрицательным пороговыми сигналами и использования сигнала об изменении знака неравенства между проинтегрированными разностным сигналом и любым из пороговых сигналов для изменения компенсирующего сигнала отрицательной обратной связи, положительный и отрицательный пороговые сигналы получают путем формирования ступенчатого линейно нарастающего сигнала, пропорционального количеству проинтегрированных импульсов разностного сигнала, его нелинейного преобразования по закону корня квадратного и инвертирования, дополнительно сравнивают сформированный линейно нарастающий сигнал с постоянным уровнем, а проинтегрированный разностный сигнал - с нулевым уровнем и после достижения линейно нарастающим сигналом постоянного уровня для изменения компенсирующего сигнала отрицательной обратной связи используют сигнал о знаке проинтегрированного разностного сигнала по результатам сравнения его с нулевым уровнем. Способ состоит в следующем. Мгновенное значение входного, например повторяющегося, сигнала сравнивают с компенсирующим сигналом отрицательной обратной связи (off,, который изменяют по результатам сравнения таким образом, что разность между мгновенным значением входного и компенсирующим сигналами уменьшается к концу преобразования до величины, равной разрешающей способности преобразователя. Для этого путем многократного стробирования входного сигнала в той точке, в которой из1меряют его мгновенное значение, и его алгебраического суммирования с компенсирующим сигналом, берут разности между мгновенным значением входного и компенсирующим сигналами. Последовательность таких выборок, относящихся к одной и той же точке входного сигнала, образует иьшульсиый разностный сигнал и poi-iH (t). Дмплитуда отдепьных импульсов рнзностнрго сигнала А, f (лО,Х т-де &U - разность между мгиовенныь Г знач(1шем входного сигнала в точке стробирования Ug)(, ()n компенсирующим сигналом при i -ом стробировании . f (&и)- амплитудная характеристика строб-смесителя; - момент стробирования; ),... Если строб-смеситель имеет линейную характеристику во всем диапазоне преобразования, , где Кол- коэффи циент передачи строб-смесИтепя. действия шумовД- -А при i i: амплитуда Ау, которую имел бы разност ный сигнал при отсутствии шумов, является истинной амплитудой разностного сигнала. На каждом такте уравновешивания раз ностный сигнал интегрируют при нулевых условиях в начале такта U(T)(t)dl. гдеи„( проинтегрированный разност inu-tft Гмтчта гг ный сигнал; Ty,j,-j-- время, прошедшее после нач ла такта уравновешивания. Так как амплитуда разностного сигна ла отличается от нуля только в дискретных точках, соответствующих моментам стробирования последнее выражение можно представить в виде суммы N ,,нт.: Если входной сигнал периодический, ч, т-мгде Т - период стробирования; N - число проинтегрированных им пульсов. Амплитуда проинтегрированного раз- ностного сигнала после N стробировани 2 1-1 Одновременно с началом интегрирова- ния импульсов разностного сигнала форми руют ступенчатый линейно нарастаклш1Й сигнал и(;;руг1(Т,пропорциональный числу проир тегрированных импульсов. Амплитуда Ц -ой ступеньки этого сигнала N где 5 - крутизна амплитудной характе- ристикт формирователя линейномаростпкчнего сигнала.. Сигнал Уо Ст реобразуют по закону корня квадратного и инвертируют. В качестве отрицательного и положительного пороговых сигналов используют инвертированный и инвертированный нелинейно .вреобразоЁанный сигналы, сос}тветственно. Амплитуды положительного А и отрицательного А щ пороговых сигналов, соответствующие N проинтегрированным импульсам, равны A;J--ViN А;--П/ГМ. Знак истинной амплитуды А ц импульсного разностного сигнала, необходимый для правильного изменения компенсирук щего сигнала на следующем такте уравновешивания, определяют с помощью сравнения проинтегрированного разностного сигнала с пороговыми сигналами по следующему правилу: если А -п/еМ, то Аист Кроме того, на каждом такте уравновешивания проводят сравнение проинтегрированного разностного сигнала с нулевыл уровнем, а ступенчатого линейно нараста-, юшего сигнала с постоянным уровнем OcoVTit После того как линейно нарастающий сигнал превысит постоянный уроBeHbU -j- riCTMH-j-) JcOMSt Знак истинной амплитуды импульсного разностного сигнала определяют по правилу А|,70, то , А N С,- то А, Сравнение проинтегрированного разностного сигнала с пороговыми сигналами и с нулевым уровнем ведут до тех пор, пока не определят знак разностного сигнала. После этого компенсирующий сигнал отрицательной обратной связи изменяют согласно найденному значению и переходят к следующему такту уравновехиИвания. Если исследуемый повторяющийся сигнал .представлен в виде импульсного напряжения, все операции, необходимые для аналого-цифрового преобразования мгновенного значения этого сигнала могут быть реализованы. На чертеже представлена функционапьная схема устройства для реализации предлагаемого способа. Устройство состоит из строб-смесителя 1, управляемого строб-генераторюм 2, интегратора, 3, формирователя 4 ступен76чатого линейно нарастающего сигнала, устройства 5 нелинейного преобразования сигнала с амплитудой, равной амплитуде ступенчатого линейно нарастающего сигнала в степени 1/2, инвертора 6, сравнивающих устройств 7 и , сравнивающего устройства 8, управляемого сравнивающего устройства 9, устройства 10 отработки напряжения компенсации, цифроаналогового преобразователя (ЦАП) 11. Устройство работает следующим обра- зом. Входное напряжение U подают на первый вход смесителя 1, напряжение компенсации УКОЛА с выхода ЦАП 11 подают на второй вход смесителя, на третий вход которого подают строб-импульсы На выходе смесителя образуется импульсный разностный сигнал с амплитудой, пропорциональной разности мгновенного зна- чения входного и компенсирующего напряжения. Мсмент стробирования задают с помощью импульсного сигнала синхронизации ИСИН РИмпульсный разностный сигнал, посту- пающий с выхода строб-смесителя 1, накапливают с помощью интегратора 3, на выходе которого получают проинтегрированный разностный сигнал. В начале каждого такта уравновешивания осуществляют сброс интегратора 3 сигналом Установка, вырабатываемым устройством 1О отработки напряжения компенсации. Этот же сигнал используют для сброса форми- рователя 4 ступенчатого линейно-нараста- ющего сигнала. Формирователь 4 формирует из импуль сного сигнала синхррнизации ступенчатый линейно нарастающий сигнал, про- порционаЛьный числу проинтегрированных импульсов разностного сигнала, которое равно числу, синхроимпульсов, поступйвших на формирователь за время интегрирования. Линейно-нарастающий сигнал подают на устройство 5 нелинейного преоб- разования, которое преобразует этот сиг-
нал по закону корня квадратного, и на первый вход сравнивающего устройства 8, на второй вход.которого поступает постоянный уровень.
Сравнивающие устройства 7 и 7 проводят сравнение проинтегрированного разностного сигнала с выхода интегратора 3 с положительным и отрицательным пороговыми сигналами, соответственно. На вход сравнивающего устройства 7 пороговый сигнал поступает с выхода устройства 5 нелинейного преобразования непосредственно, а на вход сравнивающего
лами, соответствующего знаку разностного сигнала, задают величиной крутизны ампш тудной характеристики формирователя 4, которая определяет амплитуд ступенек линейно нарастающего сигнала.
При условии, когда случайная погрещность преобразования с вероятностью, не меньщей выбранной величины вероятности, не превышает разряда преобразователя, и при прочих равных условиях, предлагаещз1й способ позволяет сократить время преобразования по сравнению с известным в 2,8 раза., 88 устройства 7-через инвертор 6. При иэменении знака неравенства между проинтегрированным разностным сигналом и одним из пороговых сигналов с выхода соответствующего сравнивающего устройства 7 или 7 , на устройство Ю отработки напряжения компенсации поступает сигнал, по которому устройство 10 осуществляет изменение выходного кода согласно программе поразрадного уравновешивания и вырабатывает сигнал Установка. Выходы сравнивающих устройств 7 и 7 соединены по схеме МОНТАЖНОЕ ИЛИ с, соответствующими выходами управляемого сравнивающего устройства 9,которое сравнивает проинтегрированный разностный сигнал с выхода интегратора 3 с нулевым уровнем. Сигнал о знаке проинтегрированного разностного сигнала появляется на одном из выходов управляемого сравнивающего устройства 9 лищь при наличии разрешающего сигнала на управляющем входе устройства 9, кото- рый поступает с выхода сравниваклаего устройства 8 после превыщения линейно нарастающим сигналом постоянного уровня Ucowsi Если проинтегрированный разностный сигнал имеет положительный знак, выходной сигнал появляется на том выходе управляемого сравнивающего устройства 9, который соединен с выходом сравнивающего устройства 7, а если проинтегрированный разностный сигнал имеет отрицательный знак, выходной сигнал появляет- ся на выходе устройства 9, соединенном с выходом устройства 7. Выходной код с устройства 10 отра- напряжения компенсации поступает на вход цифроаналогового преобразоватвг ля 11, который преобразует его в напряжение компенсадаи (лВероятность правильного определения знака разности между мгновенным значением входного и компенсирующим сигна- 9 6 Формула изобретения Способ аналого-цифрового преобразова ния мгновенного значения повторяющегося сигнала, основанный на поразрядном уравновешивании компенсирующим сигналом отрицательной обратной связи мгновенного значения входного сигнала путем многократного стробирования входного сигнала, его алгебраического суммирования в момент стробирования с компенсирующим сигналом отрицательной обратной связи, интегрирования полученного импульсного разностного сигнала на каждом такте уравновешивания, сравнения проинтегрированного разностного сигнала с положительным и отрицательным пороговыми сигналами, использования сигнала об изменении знака неравенства между проинтегрированным разностным сигналом и любым из пороговых сигналов для изменения компенсирующего сигнала отрицательной обратной связи, отличающий с я тем, что, с целью сокращения времени преобразования, положительный и отрицательный пороговые сигналы 810 получают путем формирования ступенчатого линейно нарастающего сигнала, пропорционального количеству проинте грированных импульсов разностного сигнала, его нелинейного преобразования по закону корня квадратного и инвертирования, дополнительно сравнивают сформированный линейно-нарастающий сигнал с постоянным уровнем, а проинтегрированный разностный сигнал - с нулевым уровнем и после достижения линейно нарастающим сигналом постоянного уровня для изменения компенсирук)щего сигнала отрицательной обратной связи используют сигнал о знаке проинтегрированного разностного сигнала по результатам сравнения его с нулевым уровнем. Источники информации, принятые во внимание при экспертизе 1.Вопросы радиоэлектроники, серия Радиоизмерительная техника, 1971, вып. 4, с. 79-85. 2.Микроэлектронные цифроаналоговыё и аналого-цифровые преобршзователи информации. Под ред. В. Б. Смолова, 1976, с. 307 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Стробоскопический аналого-цифровой преобразователь | 1981 |
|
SU1023651A1 |
| Цифровой стробоскопический преобразователь | 1980 |
|
SU949509A1 |
| Аналого-цифровой стробоскопический преобразователь | 1980 |
|
SU959274A1 |
| Осциллографический способ измерения временных параметров сигналов | 1985 |
|
SU1372234A1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2003 |
|
RU2234112C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ | 2006 |
|
RU2313109C1 |
| Способ компенсации влияния помехи на постоянную составляющую сигнала | 1982 |
|
SU1117584A1 |
| Цифровой стробоскопический преобразователь электрических сигналов | 1983 |
|
SU1087895A1 |
| УСТРОЙСТВО И СПОСОБ ПРЕОБРАЗОВАНИЯ АНАЛОГОВОГО СИГНАЛА В ЦИФРОВУЮ ФОРМУ, УСТРОЙСТВО И СПОСОБ ПРЕОБРАЗОВАНИЯ МНОЖЕСТВА ДВОИЧНО-КОДИРОВАННЫХ ЧИСЛОВЫХ ОТСЧЕТОВ СИГНАЛА В АНАЛОГОВЫЙ СИГНАЛ | 1994 |
|
RU2159505C2 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2010 |
|
RU2447464C1 |
