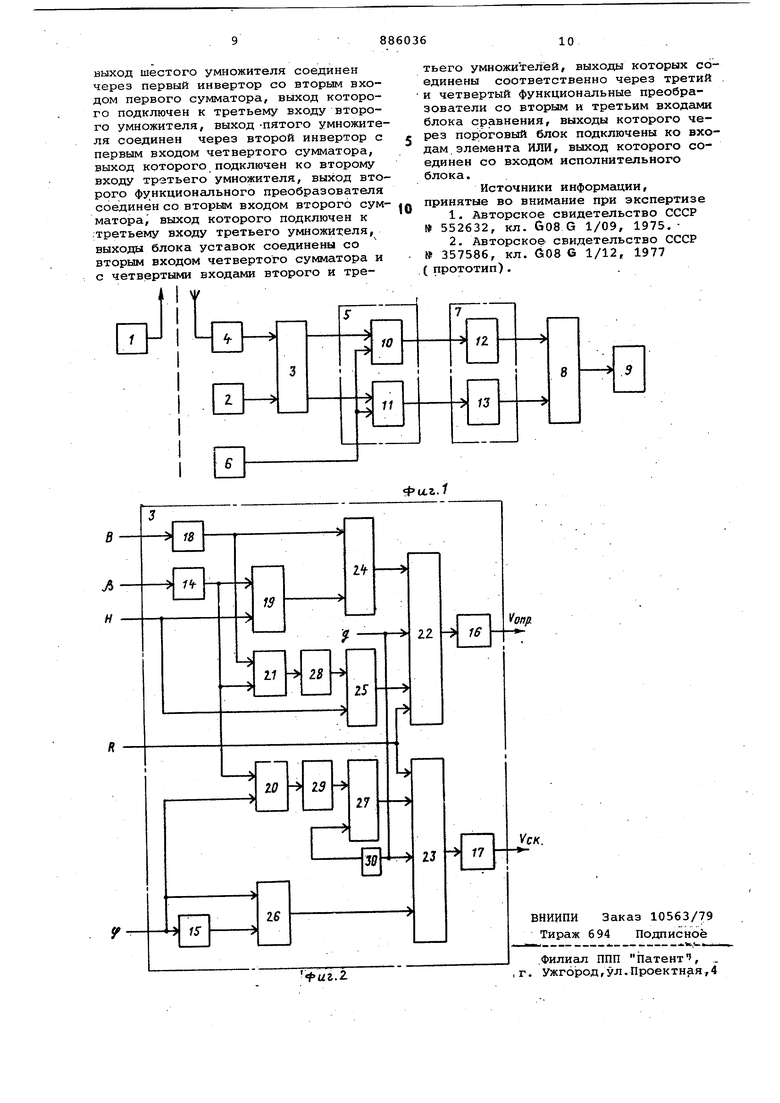
Изобретение относится к управлению транспортными средствами в условиях изменяющейся дорожной обстановки. Известно устройство для управления транспортным средством, содержа щее на контролируемом пункте передатчик, а на транспортном средстве приемники, элемент ИЛИ, счетчик, де шифраторы, преобразователи кбда в напряжение и частоты в напряжение, элемент сравнения и исполнительный блок 1. Наиболее близким к предлагаемому по технической сущности является устройство для регулирования скорос ти движения транспортного средства, содержащее установленный на контролируемом участке передатчик, а на транспортном средстве - приемник и датчик скорости, выходы которых сое динены со входами блока сравнения, выход которого подключен к исполнительному блоку 2. Недостатком известных устройств является невозможность их использования в условиях изменяющейся дорож ной обстановки. Цель изобретения - расширение фу ционёшьных возможностей устройства Поставленная цель достигается тем, что в устройство введены на транспортном средстве пороговый блок, элемент ИЛИ,, блок датчиков дорожной обстановки, четыре функциональных преобразователя, шесть умножителей, блок уставок, два инвертора и четыре сумматора, первый и второй выходы приемника подключены соответственно ко входу первого умножителя и первого функционального преобразователя, третий выход приемника подключен к первым входам второго и третьего умножителей, первый выход блока датчиков дорожной обстановки соединен с первыми входами четвертого умножителя и первого сумматора, второй выход блока датчиков дорожной обстановки подключен ко входу второго функционального преобразователя и к первым входам пятого умножителя и второго сумматора, выход первого умножителя соединен с первыми входами третьего сукматора и шестого умножителя, выход первого функционального преобразователя соединен со вторыми входами четвертого, пятого и шестого умножителей, выход четвертого умножителя подключен ко второму входу третьего сумматора, выход которого соединён СО вторым входом второго умножителя, выход шестого умножителя соединен через первый инвертор со вторым входом первого сумматора, выход которого подключен к третьему входу второго умножителя, выход пятого умножителя соединен через второй инвертор с первым входом четвертого сумматора выход которого подключен ко второму входу третьего умножителя, выход вто рого функционального преобразователя соединен со вторым входом второго сумматора, выход которого подключен к третьему входу третьего умножителя выходы блока уставок соединены со вторым входом четвертого сумматора и с четвертыми входами второго и треть го умножителей, выходы которых соеди нены соответственно через третий и четвертый функциональные преобразов тели со вторым и третьим входами бл ка сравнения, выходы которого через пороговый блок подключены ко входам элемента ИЛИ, выход которого соедин со входом исполнительного блока. Как известно, скорость движения транспортного средства на повороте ограничивается возможностью возникновения бокового опрокидывания или скольжения транспортного средства. Так, предельная скорость движения транспортного средства на повороте, при которой еще не происходит бокового опрокидывания Vonpr находится из уравнения Hig-R-(B/g) - (, а предельная скорость движения тран спортного средства на повороте, при которой еще не происходит скольжения в бок (.VCK ), находится из уравне V Г V -f- СК где Н - высота расположения центра тяжести; fi - угол наклона виража; В колея транспортного средст ва; сг - ускорение свободного падеR - радиус поворота; vf - коэффициент сцепления коле с опорной поверхностью. Из уравнения (1) и (2) видно, чт на одном и том же повороте вероятность возникновения бокового опроки дывйния и скольжения -зависит от дорожной обстановки, а именно от ко эффициента сцепления колес с опорной поверхностью, высоты И расположения центра тяжести. Так, при больших значениях коэффициента т сцепления колес с опорной поверхнос тью (например, при сухом дорожном покрытии) опрокидывание произойдет при меньшей скорости движения транс портного средства, чем скольжение, т.е. при больших значениях коэффициента сцепления колес с опорной поверхностью имеет место неравенство опр ск Наоборот, при малых значениях коэффициента сцепления колес с опорной поверхностью (например, при мокром дорожном покрытии } скольжение произойдет при меньшей скорости движения транспортного средства, чем опрокидывание, т.е. при меньших .значениях коэффициента сцепления колес с опорной поверхностью имеет место неравенство VCK Vonp . (4; Аналогично будет в,лиять на возникгновение опрокидывания и скольжения высота Н расположения центра тяжести транспортйого средства. Таким образом, в зависимости от дорожной обстановки может меняться величина допустимой скорости движения транспортного средства и для обеспечения безопасности движения транспортного средства на повороте должна быть выбрана в соответствии с неравенствами V V АОП опр V V АОП СКСкорость движения транспортного средства не должна превышать наименьшую из этих двух предельных скоростей. Поэтому необходимо постоянно иметь информацию о значениях предельной скорости движения транспортного средства, при которой еще не происходит боко&ого опрокидывания, и .предельной скорости движения транспортного средства, при которой еще не происходит скольжеуия в бок, и в соответствии с этой информацией ограничивает скорость движения транспортного средства. На фиг.1 представлена блок-схема устройства; на фиг.2 - блок-схема вычислительного блока. Устройство содержит передатчик 1., установленный в районе контроля параметра движения, и установленный на транспортном средстве блок 2 датчиков дорожной обстановки, соединенный с одними входами вычислительного блока 3, другие входы которого соединены с приемником 4, а выходы со вторым входом блока 5 сравнения, первый вход которого соединен с датчиком 6 скорости, а выход - с пороговым блоком 7, выход которого соединен с элементом ИЛИ 8, выход которого соединен с исполнительным блоком 9. Блок 5 сравнения состоит из элементов 10 и 11 сравнения, а пороговый блок 7 - из пороговых элементов 12 и 13. Передатчик 1 предназначен для передачи в приемник 4 по линиям связи информации о величине радиуса поворота и величине угла наклона виража:. Передатчик 1 устанавливается перед поворотом. Приемник 4 служит для приема передаваемой по линии связи передатчиком 1 информации о величине радиуса поворота и величине угла наклона виража и передачи ее в вычислительный блок 3. Датчик б контролируемого параметра предназначендля выдачи в блок 5 сравнения фактического значения скорости движения транспортного средства, Блок 2 датчиков дорожной обстанов ки предназначен для выдачи в вычисли тельный блок 3 сигналов, значения которых пропорциональны значениям коэффициента сцепления колес с опорной поверхностью и высоте расположения центра тяжести. Элементы 10 и 11 сравнения предназначены для сравнения допустимых скоростей движения с действительной скоростью движения транспортного сре ства. Пороговые элементы12 и 13 служат для фиксирования превышения фактичес кой скорости движения транспортного средства над допустимой скоростью движения. Вычислительный блок 3 предназначе для нахождения в соответствии с урав нениями (.1)и (2) по сигналам, поступающим с приемника 4 и блока 2 датчи ков дорожной обстановки, значений предельных скоростей движения транспортного средства на повороте, при которых еще не происходит бокового опрокидывания и скольжения. . Вычислительный блок 3 состоит из функциональных преобразователей 1417, умножителей 18-23, сумматоров 24-27, инверторов 28 и 29 и блока 30 уставок. Устройство работает следующим образом. Пусть,например, транспортное сред ство выехало по сухому асфальтобетон ному покрытию в зону действия передатчика 1, установленного в районе с ограниченной скоростью движения перед поворотом. Ограничение скорости движения транспортного средства обусловлено возможностью возникновения на повороте его опрокидывания или скольжения. Сигнал, передаваемый передатчиком 1, несет в себе информа цию о величине радиуса поворота R и величине угла наклона fb . Этот сигнал принимает установленный на транспорт ном средстве приемник 4, который выдает на входы вычислительного блока 3 сигнал, величина которого лропорци онсшьна величине радиуса поворота 1 и величине угла наклона виража р. На другие входы вычислительного блока 3 с блока 2 датчиков дорожной обстановки поступает сигнал, пропорциойальный величине коэффициента f сцепления колес с опорной поверхностью и высоте расположения центра тяжести Н. По сигнсшам, поступающим с приемника 4 и блока 2 датчиков дорожной обстановки, вычислительный блок 3 в соответствии с уравнением (1) находит предельную скорость движения транспортного средства, на повороте, при которой еще не происходит бокового опрокидывания Voapi а в соответствии с уравнением (.2 ) - предельную скорость движения транспортного средства на повороте, при которой еще не происходит скольжения в бок . Умножитель 18 умножает аргумент В на 1/2, афункциональн1а1й преобразователь 14 находит тангенцисШЬную зависимость от аргумента .fi . Функциональный преобразователь 15 находит тангенциальную зависимость от аргумента Ц .Сумматор 26 суммирует аргумент P с функцией fcgif , .поступающей на его вход с преобразователя 15. Умножитель 20 перемножает аргумент Ч на функцию поступающую с выхода преобразователя 14. Инвертор 29 изменяет знак функции , поступающей на его вход с умножителя 20. Сумматор;,27 прибавляет к (1) функцию ( - i-gP). Умножитель 23 умножает функцию ({+tg, поступающую с выхода сумматора 26, на функцию l/(l-l tgj3) постоянную и аргументR ,поступающий с приемника 4. Преобразователь 17 воспроизводит степенную зависимость, равную 1/2 от функции If .-fcory , поступающей с выхода -vf-te-pумножителя 23. Таким образом, преобразователь 17 формирует сигнал, пропорциональный величине предельной скорости движения транспортного средства на повороте, при которой еще не происходит скольжения в бокУск. Умножитель 19 умножает функцию tgp,поступающую с выхода преобразователя 14, на аргумент Н, поступакмдий с блока 2 датчиков дорожной обстановки. Сумматор 24 складывает функцию В/2, поступающую с умножителя 18, с функцией , поступающей с умножителя 19. Умножитель 21 умноЖает функцию В/2 и igf/, поступающие соответственно с умножителя 18 и преобразователя 14. Инвертор 28 изменяет знак В/2 tgfft , поступающей с выхода умножителя 21. Сумматор 25 функцию (-B/2-tQ p), поступающую с инвертора 28, складывает с аргументом Н, поступающим с блока 2 датчиков дорожной обстановки. Умножитель 22 умножает функцию в Н-Цгрч-г , поступающую с выхода cfyMМатора 24, на функцию 1/(н-В/2 , постоянную g и аргумент R, поступающий с приемника 4, Преобразователь 16 воспроизводит степенную зависимость, равную 1/2, от функции ц -В /24tyRi поступающей с выхода умножителя 22, Таким образом, преобразователь 16 формирует сигнал, пропорциональный величине предельной скорости движения транспортного сред 4;тва на повороте, при которой еще не происходит бокового опрокидыванияVpfi Сигналы У„рИ У(.| сравниваются соотве ственно элементами 10 и 11 сравнения блока 5 сравнения с поступающим от датчика 6 скорости сигнашом, пропорциональным фактическому значению ско рости движения транспортного средств Так как в рассматриваемом примере ас фальтобетонное покрытие сухое, то в соответствии с неравенством (3) сигнал, поступающий на вход элемента 10 сравнения, имеет меньшую величину, чем сигнал, поступающий на вход элемента 11 сравнения. В случае превыше ния фактической скорости движения транспортного средства предельной скорости движения транспортного средства на повороте, при которой еще .не происходит бокового опрокидывания, элемент 10 сравнения вырабатывает сигнал, который воздействует на пороговый элемент 12 порогового блока 7, В результате .этого воздействия пороговый элемент 12 перейдет в новое состояние, при котором на выходе порогового элемента 12 появит ся сигнал. Этот сигнал, воздействуя на исполнительный блок 9 через эле7 мент ИЛИ 8, уменьшает скорость движения транспортного средства до тех пор,пока фактическая скорость дв.ижени не будет меньше предельной скорости движения транспортного средства на повороте, при которой еще непроисходит бокового опрокидывания. Когда фактическая скорость движения транспортного средства будет меньше допустимой, тогда исчезнет сигнал на выходе элемента 10 сравнения и пороговый элемент 12 перейдет в свое первоначальное исходное состояние. Исчезновение выходного сигнала э;1емента 10 сравнения приводит к исчезновению сигнала на выходе элемента |1ЛИ ff, который прекращает свое воздействие на исполнительный блок 9. Таки образом, после въезда транспортного средства в зону действия передатчика 1, скорость движения транспортного средства становится меньше допустимой. при изменении дорожной обстановки - уменьшении коэффициента If сцепления колес опорной поверхностью, например, от прошедшего до:кдя, в соответствии с неравенством (4 ) сигнал, поступающий на вход элемента 10 сравнения, имеет меньшую величину, чем сигнал, поступающий на вход элемента 11 сравнения. В случае превышения фактической скорости движения транспортного средства предельной скорости движения транспортного средства на повороте, при которой еще не происходит скольжения в бок, элемент 11 сравнения вырабатывает сигнал, который воздействует на пороговый элемент 12 порогового блока 7. В результате этого воздействия пороговый элемент 12 выдает сигнал на вход элемента ИЛИ 8, который, воздействуя на исполнительный блок 9, приведет скорость движения транспортного средства в соответствие с предельной скоростью движения транспортного средства на повороте, при которой еще не происходит движение в бок. Экономическая эффективность от использования предлагаемого устройства определяется указанными выше его техническими преимуществами. Формула изобретения Устройство для регулирования скорости движения транспортного средства, содержащее установленный на контролируемом участке передатчик, а на транспортном средстве - приемник и датчик скорости, подключенный к первому входу блока сравнения, и исполнительный блок, отличающееся тем, что, с целью расширения функциональных возможностей устройства, в него введены на транспортном средстве пороговый блок, элемент ИЛИ, блок датчиков дорожной обстановки, четыре функциональных преобразователя, шесть умножителей, блок уставок, два инвертора и четыре сумматора, первый и второй выходы приемника подключены соответственно ко входу первого умножителя и первого функционального преобразователя, третий выход приемника подключен к первым входам второго и третьего умножителей первый выход блока датчиков дорожной обстановки соединен с первыми входами четвертого умножителя и первого сумматора, второй выход блока датчиков дорожной обстановки подключен ко входу второго функционального преобразователя и к первым входам пятого умножителя и второго сумматора,выход первого умножителя соединен с первыми входами третьего сумматора и шестого умножителя, выход первого функционального преобразователя соединен со вторыми входами четвертого, пятого и шестого умножителей, выход четвертого умножителя подключен ко второму входу третьего сумматора, выход которого соединен со вторым входом второго умножителя.
выход шестого умножителя соединен через первый инвертор со вторым входом первого сумматора, выход которого подключен к третьему входу второго умножителя, выход -пятого умножителя соединен через второй инвертор с первым входом четвертого сумматора, выход которого подключен ко второму входу трзтьего умножителя, выход второго функционального преобразователя соединен со вторым входом второго сумматора, выход которого подключен к .третьему входу третьего умножителя, выходы блока уставок соединены со вторым входом четвертого сумматора и с четвертыми входами второго и третъего умножителей, выходы которых соединены соответственно через третий и четвертый функциональные преобразователи со вторым и третьим входами блока сравнения, выходы которого через пороговый блок подключены ко входам, элемента ИЛИ, выход которого соединен со входом исполнительного блока.
Источники информации, принятые во внимание при экспертизе
0
1.Авторское свидетельство СССР 552632, кл. G08 G 1/09, 1975.
2.Авторское свидетельство СССР № 357586, кл. G08 G 1/12, 1977
( прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости движения транспортного средства | 1983 |
|
SU1117679A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИСПРАВНОСТИ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2381929C1 |
| Способ и устройство уменьшения аварийности и предотвращения дорожно-транспортных происшествий | 2023 |
|
RU2824018C1 |
| УСТРОЙСТВО ОЦЕНКИ КАЧЕСТВА ВОЖДЕНИЯ АВТОМОБИЛЯ | 2005 |
|
RU2308385C2 |
| Устройство для информирования водителя автомобиля об условиях обгона | 2021 |
|
RU2755645C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИСПРАВНОСТИ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2390443C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ АВТОМОБИЛЯ В АВАРИЙНЫХ СИТУАЦИЯХ | 1991 |
|
RU2006385C1 |
| Бортовая радиолокационная станция | 2016 |
|
RU2609156C1 |
| ПРЕДУПРЕДИТЕЛЬНО-ОПОВЕСТИТЕЛЬНАЯ ЛОКАЛЬНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ДЛЯ АВТОТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2173890C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2462696C1 |
В
Л
Н
u.z.1
Vonfi
