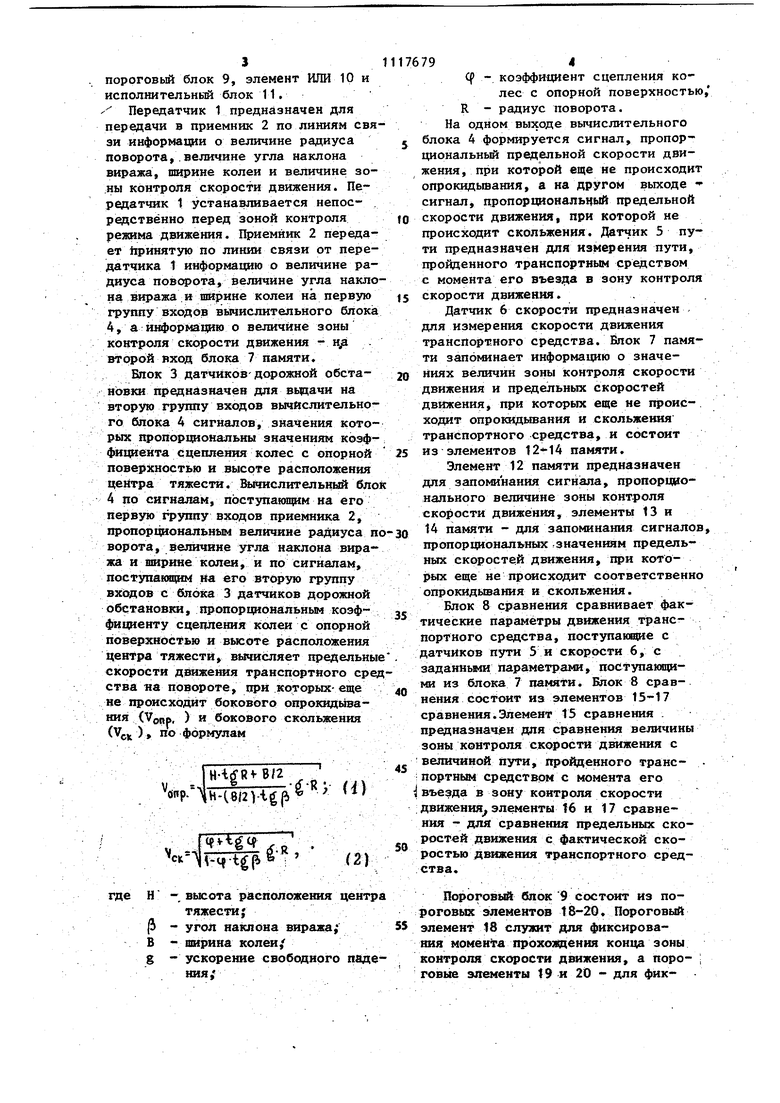
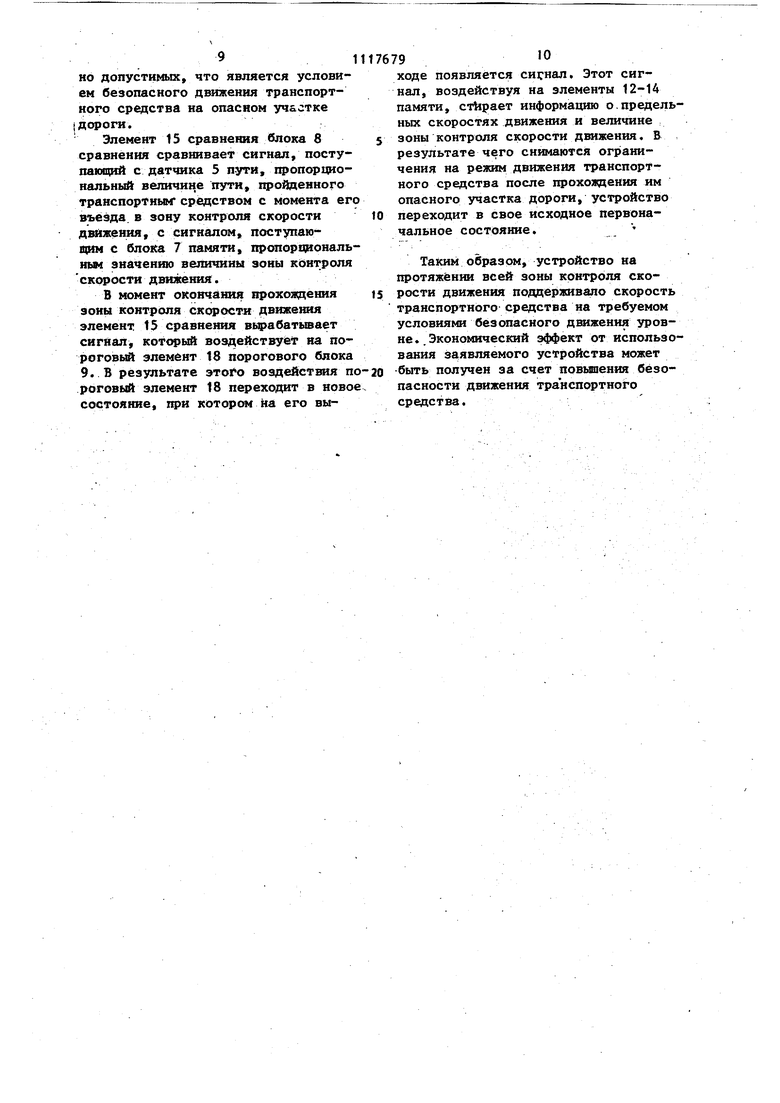
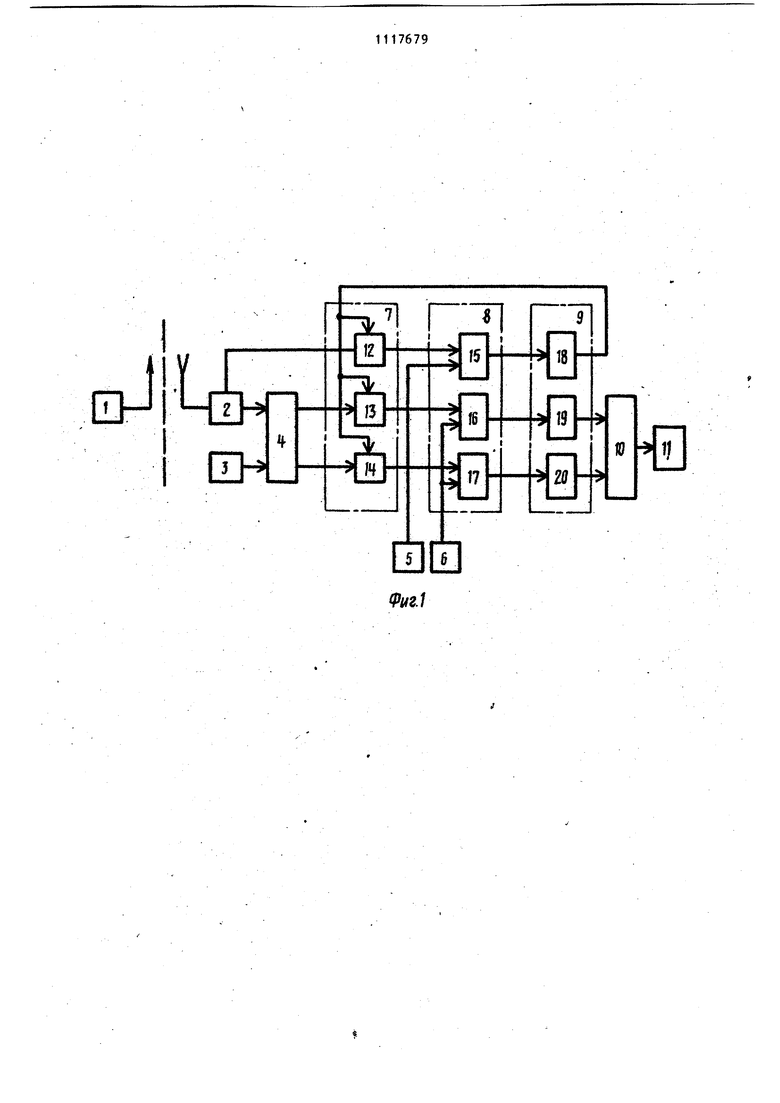
Изобретение относится к области управления транспортными средствами, а точнее к управлению транспортными средствами на опасных участках дороги. Известно устройство для регулирования скорости движения транспортного средства, содержащее установленный ria контролируемом участке передатчик, а на транспортном средс ве - приемник и датчик скорости,выходы которых соединены с входами блока сравнения, выход которого под ключен к входу исполнительного блока l . Однако это устройство позволяет контролировать режим движения транс портного средства, задаваемый только одним ограничением, например ско ростью движения транспортного средс ва. Наиболее близким к предлагаемому по технической сущносч-и является устройство для регулирования скорости движения транспортного средст ва, содержащее установленный перед зоной контроля передатчик, а на транспортном средстве - приемник и блок датчиков дорожной обстановки, группы чыходов которых подключены соответственно к первой и второй группам ВХОДОВ вычислительного блок датчик скорости, выход которого сое динен с первым входом блока сравнения, первый и второй выходы которо го соединены соответственно с первым и вторым входами порогового бло ка, первый и второй выходы которого соединены с соответствующими входами элемента ИЛИ, выход которого соединен с входом исполнительного блока, первый и второй выходы вычис лительного блока соединены с вторым и третьим входами блока сравнения 2 Известное устройство не позволяе контролировать режим движения транс портного средства, задаваемый несколькими взаимосвязанными ограни чениями, например величиной ограничения и продолжительностью ограничения, -а контролирует ограничение, например скорость, только в одной определенной точке- точке расположе ния передатчиков, например перед опасным участком дороги, не связывая это ограничение с протяженность этого участка. Целью изобретения является расширение функциональных возможностей устройства путем контроля режима движения на заданном участке дороги. Поставленная цель достигается тем, что в устройстве для регулирования скорости движения транспортного средства, содержащее установленный перед зоной конфропя г ередатчик, а на транспортном средстве приемник и блок датчиков дорожной обстановки, группы выходов которых подключены соответственно к первой и второй группам входов вьиислительного блока, датчик скорости,выход которого соединен с первым входом блока сравнения, первьй и второй выходы которого соединены соответственно с первым и вторым входами порогового блока, первый и второй выходы которого соединены с соответствующими входами элемента ИЛИ, выход которого соединен с входом исполнительного блока,введены блок памяти и датчик пути,выход которого соединен с вторым входом блока сравнения, третий выход которого соединен с третьим входом порогового блока, третий выход которого соединен с первым входом блока памяти, первый, второй и третий выходы которого подключены соответственно к третьему, четвертому и пятому входам блока сравнения, выход приемника и первьй и второй выходы вычислительного блока соединены соответственно с вторым, третьим и четвертым входами блока памяти. Благодаря тому, что в устройство введены блок памяти и датчик пути, стало возможным контролировать данным устройством режим движения транспортного средства и вне зоны действия передатчика, т.е. расширяются функхщональные возможности устройства.. . На фиг.1 представлена структурная схема устройства; на фиг.2 - блоксхема вычислительного блока. Устройство содержит установленньй перед зоной контроля режима вижения передатчик 1 и. установленные на транспортном средстве приемник 2, блок 3 датчиков дорожной обстановки, вычислительный блок А, атчик 5 пути, датчик 6 скорости, блок 7 памяти, блок 8 сравнения. J пороговый блок 9, элемент ИЛИ 10 и исполнительный блок 11. / Передатчик 1 предназначен для передачи в приемник 2 по линиям свя зи информации о величине радиуса поворота,.величине угла наклона виража, ширине колеи и величине зоны контроля скорости движения. Передатчик 1 устанавливается непосредствённо перед зоной контроля режима движения. Приемник 2 передает йринятую по линии связи от передатчика t информацию о величине радиуса поворота, величине угла накло на виража ; и ширине колеи на первую группу входов вычислительного блока 4, а информацию о величй:не зоны контроля скорости движения н/i второй вход блока 7 памяти. Блок 3 датчиков-дорожной обстановки пред иазначев для вьщачи на вторую группу входов вычислительного блока 4 сигналов, значения которых пропорциональны значениям коэффициента сцепления колес с опорной поверхностью и высоте расположения цейтра тяжести, лчислительный бло 4 по сигналам, поступающим на его первую группу входов приемника 2, пропорциональным величине радиуса п ворота, величине угла наклона виража и ширине колеи, и по сигналам, поступакицим йа его вторую группу входов с блока 3 датчиков дорожной обстановки, пропорщюнальным коэффициенту сцепления колеи с опорной поверхностью и высоте расположения центра тяжести, вычисляет предельны скорости движения транспортного сре ства на повороте, при ко-горых- еще не происходит бокового опрокидывайся (Vonp, ) и бокового скольжения (Vj.,), по формулам В72 (i) -W Wp- H4e/2)-ig|i .J52ii.R -Nv-4-tgft S i где Н - высота расположения центр тяжести; -угол наклона виража; -ширина колеи/ -ускорение свободного паде ния; 794 cp - коэффициент сцепления колес с опорной поверхностью, R - радиус поворота. На одном выходе вычислительного блока 4 формируется сигнал, пропорциональный предельной скорости движения, при которой еще не происходит опрокидьюания, а на другом выходе сигнал, дропорциональцый предельной скорости движения, при которой не происходит скольжения. Датчик 5 пути предназначен для измерения пути, пройденного транспортным средством с момента его въез;ха в зону контроля скорости движения. . Датчик 6 скорости предназначен для измерения скорости движения транспортного средства. Блок 7 памяти зап6ю1нает информацию о значениях величин зоны контроля скорости движения и предельньпс скоростей движения, при которых еще не происходит опроюздывания и скольжения транспортного средства, и состоит из элементов памяти. Элемент 12 памяти предназначен для запоминания сигнала, пропорционального величине зоны контроля скорости движения, элементы 13 и 14 памяти - для запоминания сигналов, пропорциональных гзначениям предельных скоростей движения, при которых еще не происходит соответственно опрокидывания и скольжения. Блок 8 сравнения сравнивает фактические параметры движения транспортного средства, поступаннчие с датчиков пути 5 и скорости 6, с заданньми параметрами, поступаюпр ми из блока 7 памяти. Блок 8 сравнения состоит из элементов 15-17 сравнения.Элемент 15 сравнения предназначен для сравнения величины зоны контроля скорости движения с величиной пути, пройденного транс- портным средством с момента его въезда в зону контроля скорости движения элементы 16 и 17 сравнения - для сравнения предельных скоростей движения с фактической скоростью движения транспортного средства. Пороговый блок 9 состоит из пооговых элементов 18-20, Пороговый элемент 18 служит для фиксирования момента прЬхояпения конца зоны контроля скорости движения, а пороговые элементы t9 и 20 - для фик- сирования превьрения фактической скорости движения транспортного средства над предельно допустимымя скоростями движения. Элемент ИЛИ 10 предназначен для собирания сигналов, поступающих на его входы с пороговых элементов 19 и 20. Исполнительньй блок 11 слу жит для приведения контролируемого параметра к его заданному значению Вычислительный блок 4 (фиг.2) состоит из функциональных преобра.зователей 21-24, умножителей 25-30, сумматоров 31-34, инверторов 35 и 36, блока 37 уставок. Работу устройства рассмотрим на следующем примере. Пусть транспортное средство выехало в зону контроля скорости движ НИН - на опасный участок дороги, имеющий многочисленные повороты. Так как опасность возникновения опрокидьгаания или скольжения на поворотах имеет место на протяжении всего участка дороги, то ограничение скорости предельной скоростью д жения, определяемой условиями движения значениями козффиирента сц ления колеи с опорной поверхностью радиуса поворота, угла наклона виража, ширины колеи, высоты расположения центра тяжести, накладывается на все протяжение этого участка. Пусть также условия дорож (Ной обстановки хирактеризуются сухим асфальтобетонным покрытием.Сиг нал, передаваемый передатчиком 1, уст11новленным непосредственно перед зоной контроля скорости движения, несет в себе информацию о величине радиуса поворота R, величине угла наклона виража , ширине колеи В и протяженности зоны контроля скоро ти движения S.. Приемник 2 передает принятую по линии связи в момент охлаждения транспортным средством передатчика 1 информацию о величине радиуса поворота R, величине угла наклона виража /3 и ширине колеи В на перву группу входов вычислительного блока 4. Одновременно с этим блок 3 датчиков дорожной обстановки вьдает на вторую группу входов вычислитель ного блока 4 сигналы, значения кото рых пропорциональны значениям коэффициента сцепления и колес с опорно поверхностью ср и высоте расположения центра тяжести Н. Вычислительный блок 4 производит вьиисления скоростей и VCK в соответствии с формулами (1) и (2). Умножитель 25 умножает аргумент В на 1/2, функциональный преобразователь 21 находит тангенциальную зависимость от аргумента - f а функцйональньй преобразователь 22 - тангенциальную зависимость от аргумента cf. Сумматор 33 суммирует аргмуент if с функцией tg Cj у поступающей на его вход с преобразователя 22. Умножитель 27 перемножает аргумент (j на функцию tg /5, поступающую с выхода преобразователя 21. Инвертор 36 изменяет знак функции tf tg /3 поступающей на его вход с умножителя 27. Сумматор 34 прибавляет к выражению (v) функцию (-tji.tg/). Умножитель 30 умножает функцию (Ц + tg()p ), поступающую с выхода сумматора 33, на функцию 1/1-(.tg |3, постоянную g и аргумент R, поступающий с приемника 2. Преобразователь 24 воспроизводит степенную зависимость, равную 1/2 f tg У от функции gR , постуl-Cptg/пающей с выхода умножителя 30. Таким образом, преобразователь 24 формирует сигнал, пропорциональный величине предельной скорости движения транспортного средства на повороте, при которой еще не происходит скольжения в бок VCK-Умножитель 26 умножает функцию tg jЗ поступающую с выхода преобразователя 21, на аргумент Н, поступающий с блока 3 датчиков дорожной обстановки. Сумматор 31 складьшает функцию В/2, поступающую с умножителя 25, с функ.цией Н tg/ поступающей с умножителя 26. Умножитель 28 умножает функцию В/2 и tg nocTyпающие соответственно с умножигеля 25 и преобразователя 21. Инвертор 35 изменяет знак функции В/2tg /3, поступающей с выхода умножителя 28. Сумматор 32 функцию (-В/2 tg ),поступающую с инвертора 35, складьшает с аргументом Н,поступающим с блока 3 датчиков дорожной обстановки. Умножитель 29 умножает функцию H«tg|3 + В/2, поступающую с выхода сумматора 31 на функцию 1/(Н B/2tg/3), постоянную g и аргумент R, поступающий с приемника 2. Преобразователь 23 воспроизводит степенную зависимость, равную 1/2 от функции H-tg/ + В/2 „ ., И - B/2.tg/ -g-R, поступающей с выхода умножителя 29. Таким образом преобразователь 23 формирует сигнал пропорциональный величине предельной скорости движения транспортного средства на повороте, при которой еще не происходит боковое опрокидывание Vonp. Входящие в состав блока 7 памяти элемент 12 памяти запомнна.ет сигнал пропорциональн1 1Й значению величины зоны контроля скорости движения, поступающий с выхода приемника 2, а ,эл ементы 13 и 14 - сигналы, пропорциональные значениям предельных скоростей движения, при которых еще не происходит соответственно опрокидьшания и скольжения, поступающие с выходов вычислительного блока 4. Элементы 16 и 17 сравнения блока 8 сравнения сравнивают сигнал, поступающий с датчика 6 скорости, пропорциональный значению фактической скорости движения транспортного средства, с сигналами, поступающими из блока 7 памяти, пропорциональными предельным скоростям движения, при которых еще не происходит соответственно опрокидьюания и скольжения. В случае превышения фактической скорости движения транспортного средства одной из предельных скорос тей движения транспортного средства на опасном участке дороги - в зоне контроля скорости движения, соответ ствуюпр й элемент сравнения воздействует через связанный с ним порого вьй элемент порогового блока 9, элемент ИЛИ 10 на исполнительный блок 11, уменьшая скорость движенЯя транспортного средства до тех пор, пока фактическая скорость движения не будет меньше предельных ск ростей движения транспортного сред, ства, при которых еще не происходит опрокидьшания и скольжения. Когда фактическая скорость движения транспортного средства будет меньше предельных скоростей движения,тогда исчезнет сигнал на выходе элемента сравнения и связанный с ним пороговый элемент перейдет в свое перйоначальное исходное состояние. Так как в рассматриваемом примере условия дорожной обстановки характеризуются сухим асфальтобетонным покрытием,, то вероятность возникновения опрокидывания транспортного средства на повороте вьш1е,чем вероятность возникновения скольжения. Поэтому ограничение скорости движения транспортного средства обусловлено скоростью движения, при которой еще не происходит опрокидьгаания. В этом случае в момент превьш1ения фактической скоростью движения транспортного средства скорости движения, при которой еще не происходит опрокидывания, элемент Т6 сравнения блока 8 сравнения вырабатывает сигнал, воздействующий на пороговый элемент 19, который фиксирует превьшгение фактической скоростью движения предельно допустимой скорости. Вырабатываемый пороговым элементом 19 сигнал, воздействуя через элемент ИЛИ 10 на исполнительный блок 11, уменьшает скорость ;Jвижeния транспортного средства до тех пор, пока факти еская скорость движения не будет меньше предельной скорости движения транспортного средства на повороте, при которой еще не происходит опрокидьтания. Когда фактическая скорость движения транспортного средства будет меньше допустимой,тогда исчезнет сигнал на выходе элемента 16 сравнения и пороговый элемент 19 перейдет в свое первоначальное исходное состояние. Исчезновение вы- ходного сигнала элемента 16 сравнения приводит к исчезновению сигнала на выходе элемента ИЛИ 10,который прекращает свое воздействие на исполнительный блок 11. 1 Если во время движения транспортного средства в зоне контроля скорости движения вновь произойдет превьшение фактической скоростью движения транспортного средства одной из предельных скоростей движения, то устройство снова отреагирует на это превышение в аналогичной последовательности. Таким образом, скорость движения транспортного средства в зоне контроля скорости движения, постоянно сравниваясь с предельно допустимыми скоростями, будет всегда еньше наименьшей из двух предельно допустимых, что является условием безопасного движения транспортного средства на опасном уч&стке I дороги. Элемент 15 сравнения блоха 8 сравнения сравнивает сигнал, поступающий с датчика 5 пути, пропорциональный величине пути, пройденного транспортным средством с момента ег въезда, в зону контроля скорости движения, с сигналом, поступающим с блока 7 памяти, пропорциональ ным значению величины зоны контроля скорости движения. В момент окончания прохоя ения зоны контроля скорости движения элемент t5 сравнения вырабатывает сигнал, которъ BOSfleftcTByiet на пороговый элемент 18 порогового блока 9. В результате воздействия п роговый элемент 18 переходит в ново состояние, при котором на его вы9°ходе появляется си1:нал. Этот сигнал, воздействуя на элементы 12-14 памяти, стирает информацию о.предельных скоростях движения и величине , зоны контроля скорости движения. В результате чего снимаются ограничения на режим движения транспортного средства после прохождения им опасного участка дороги, устройство переходит в свое исходное первоначальное состояние. Таким образом, устройство на протяжении всей зоны контроля скорости движения поддерживало скорость транспортного средства на требуемом условиями безопасного движения уровне .. Экономический эффект от использования заявляемого устройства может -быть получен за счет повышения безопасности движения транспортного средства.
Г r-j
rh . г-т гп
25
ff
Z6
35
28
гэ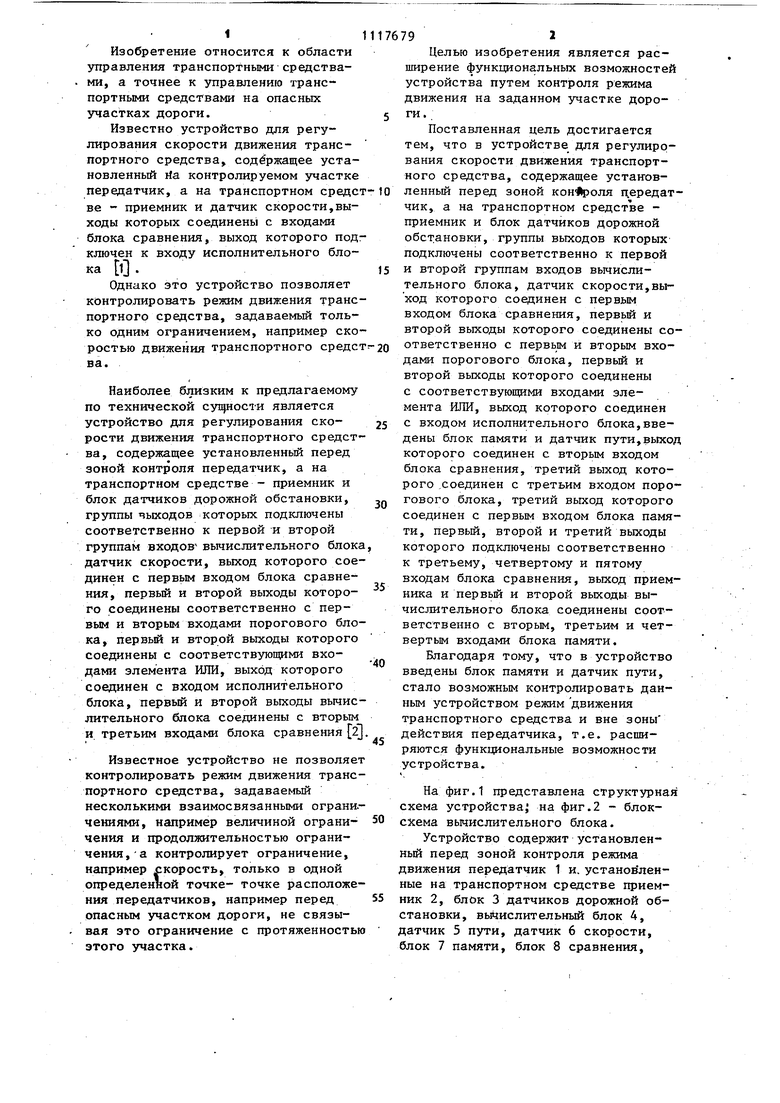
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости движения транспортного средства | 1980 |
|
SU886036A1 |
| Устройство для управления движением транспортного средства | 1978 |
|
SU744708A1 |
| Устройство для контроля графика движения транспортного средства | 1977 |
|
SU690535A1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2462696C1 |
| УСТРОЙСТВО ОЦЕНКИ КАЧЕСТВА ВОЖДЕНИЯ АВТОМОБИЛЯ | 2005 |
|
RU2308385C2 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1981 |
|
SU959142A1 |
| ТРЕНАЖЕР ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2025784C1 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2175920C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ДОРОЖНОГО ТРАНСПОРТА | 1997 |
|
RU2125295C1 |
| УСТРОЙСТВО МОДЕЛИРОВАНИЯ ДОРОЖНОГО ДВИЖЕНИЯ ДЛЯ ОБУЧЕНИЯ ПРАВИЛАМ ДВИЖЕНИЯ ТРАНСПОРТА | 1991 |
|
RU2073912C1 |

УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, содержащее установленный перед зоной контроля передатчик, а на транспортном средстве - приемник и блок датчиков дорожной обстановки, группы выходов которых подключены соответственно к первой и второй группам входов вычислительного.блока, датчик скорости, выход которого соединен с первым входом блока сравнения, первый и второй выходы которого соединены соответственно с первым и вторым входами порогового блока, первьй ивторой выходы которого соединены с соответствующими входами элемента ИЛИ, выход которого соединен с входом исполнительного блока, отличающееся тем, что, с целью расширения функциональных возможностей устройства путем контроля режима движения на заданном участке дороги, в него.введены блок памяти и датчик пути, выход которого соединен с вторым входом блока сравнения, третий выход которого соединен с третьим входом порогового блока, третий выход которого соединен с первым входом блока памяти, первьй, второй и третий выходы которого подключены соответственно к третьему, четвертому и пятому входам блока сравнения, выход приемника и первьй и второй вьЬсоды вычислительного блока соединены соответственно с вторым, третьим и четвертым входами блока памяти. Од СО
6
27
4
ZZ
Фиг. 2
fCK
14
3(
4-
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 3375816, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для регулирования скорости движения транспортного средства | 1980 |
|
SU886036A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
