Изобретение относится к системам автоматического управления подвижным объектом, использующим пеленгатор, в частности к системам автоматического управления автомобилем, в том числе в условиях встречного движения транспорта.
Изобретение может быть использовано в автомобилестроении для установки на транспортных средствах, к которым предъявляются повышенные требования по обеспечению безопасности.
Известны системы самонаведения подвижных объектов, содержащие пеленгатор, датчики угловой скорости, линейного ускорения, рулевые привода, органы управления, соединенные соответствующими связями с блоком управления движением подвижного объекта в плоскости, поперечной вектору его скорости, обеспечивающие наведение подвижного объекта с минимальным расстоянием от встречного подвижного объекта [1] .
Наиболее близкое к изобретению по принципу действия и достигаемому результату является устройство управления транспортным средством, содержащее датчик скорости, локационный датчик, через блок расчета характеристик продольного движения соединенный с исполнительными механизмами разгона и торможения [2] . Это устройство обеспечивает автоматическое поддержание безопасной дистанции между следующими в колонне транспортными средствами.
Недостатком известного устройства является его низкая эффективность в условиях сложной обстановки на дорогах, особенно на дорогах с многорядным и встречным движением, так как оно не способно рассчитать и совершить маневр.
Целью изобретения является расширение функциональных возможностей обеспечения безопасности движения на дорогах, в том числе и со встречным движением.
Это достигается тем, что предлагаемое устройство дополнительно содержит исполнительный механизм поворота руля, датчик угла поворота руля, блок расчета угла крена, логический блок, блок расчета предельных параметров, блок предварительной обработки, блок оптимальной обработки, блок расчета параметров безопасного разъезда, блок расчета потребного угла поворота руля, блок уставок, блок индикации, при этом датчики угловой скорости установлены по продольной и вертикальной осям, датчик линейного ускорения - по поперечной оси автомобиля, и его выход соединен с первым входом блока оптимальной обработки и первым входом блока расчета параметров безопасного разъезда, второй, третий, четвертый, пятый и шестой входы которого соединены соответственно с первым и вторым выходами локационного датчика, первым выходом блока предварительной обработки, первым выходом блока уставок и выходом блока оптимальной обработки, первый выход - с первым входом блока расчета потребного угла поворота руля, а второй выход - со вторым входом блока расчета характеристик продольного движения, при этом второй вход блока расчета потребного угла поворота руля соединен с выходом датчика скорости, а выход - с входом исполнительного механизма поворота руля и первым входом блока индикации, второй вход которого соединен с выходом блока расчета характеристик продольного движения; выход пеленгатора через второй выход блока предварительной обработки, первый, второй и третий входы которого соединены с выходами блока расчета угла крена, второго датчика угловой скорости и вторым выходом блока уставок, соединен с вторым входом блока оптимальной обработки, третий, четвертый и пятый входы которого соединены с первым и вторым выходом локационного датчика и третьим выходом блока уставок, четвертый выход которого соединен с первым входом блока расчета угла крена, второй вход которого соединен с первым датчиком угловой скорости, а выход - с первым входом логического блока, второй вход которого соединен с выходом блока расчета предельных параметров, а выход - с вторым входом исполнительного механизма разгона и торможения, при этом первый вход блока расчета предельных параметров соединен с датчиком угла поворота руля, который механически соединен с исполнительным механизмом поворота руля, а второй и третий входы - с выходом датчика скорости и пятым выходом блока уставок.
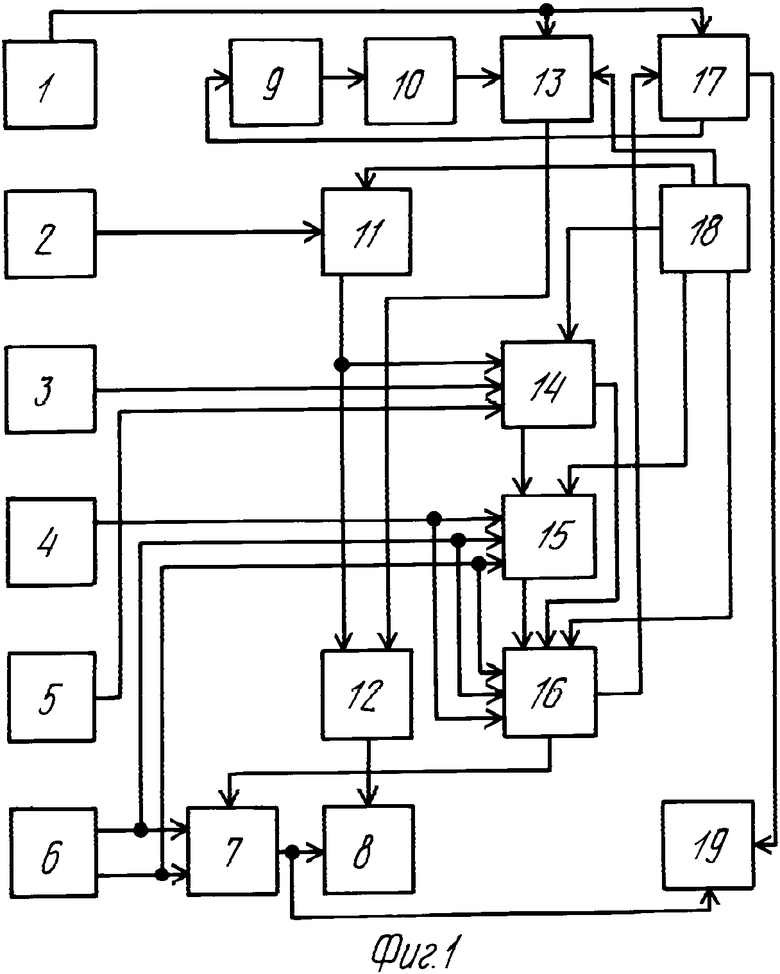
На фиг. 1 приведена функциональная схема устройства; на фиг. 2 - функциональная схема логического блока; на фиг. 3 - функциональная схема блока расчета предельных параметров; на фиг. 4 - функциональная схема блока оптимальной обработки; на фиг. 5 - функциональная схема блока расчета параметров безопасного разъезда; на фиг. 6 - функциональная схема блока индикации.
Предлагаемое устройство содержит датчик скорости 1, первый датчик 2 угловой скорости, второй датчик 3 угловой скорости, датчик 4 линейного ускорения, пеленгатор 5, локационный датчик 6, блок 7 расчета характеристик продольного движения, исполнительный механизм 8 разгона и торможения, исполнительный механизм 9 поворота руля, датчик 10 угла поворота руля, блок 11 расчета угла крена, логический блок 12, блок 13 расчета предельных параметров, блок 14 предварительной обработки, блок 15 оптимальной обработки, блок 16 расчета параметров безопасного разъезда, блок 17 расчета потребного углa поворота руля.
Кроме того, устройство содержит блок 18 уставок, блок 19 индикации, компараторы 20, 21, блок 22, 23 деления, генератор 24 функции arctg, умножители 25, 26, квадратор 27, умножитель 28-31, блок 32 деления, сумматор 33-35, интегратор 36, 37 управляемым сбросом, диодный выпрямитель 38, компараторы 39-42, диодный выпрямитель 43, сумматоры 44, 45, генератор 46 функции "sin", умножители 47, 48, квадратор 49, блок деления 50, 51, дифференциатор 52, компаратор 53, поляризованное реле 54, 55, лампочки 56-59 подсвета.
Предлагаемое устройство состоит из датчика скорости 1, первого и второго датчиков 2 и 3 угловой скорости, датчика 4 линейного ускорения, пеленгатора 5, локационного датчика 6, первый и второй выходы которого через блок 7 расчета характеристик продольного движения соединены с первым входом исполнительного механизма 8 торможения и разгона, исполнительного механизма 9 поворота руля, датчика 10 угла поворота руля, блока 11 расчета угла крена, логического блока 12, блока 13 расчета предельных параметров, блока 14 предварительной обработки 14, блока 15 оптимальной обработки, блока 16 расчета параметров безопасного разъезда, блока 17 расчета потребного угла поворота руля, блока 18 уставок, блока 19 индикации 19. Причем первый 2 и второй 3 датчики угловой скорости установлены по продольной и вертикальной осям, датчик 4 линейного ускорения - по поперечной оси автомобиля и его выход с первым входом блока оптимальной обработки и первым входом блока 16 расчета параметров безопасного разъезда, второй, третий, четвертый, пятый и шестой входы которого соединены соответственно с первым и вторым выходом локационного датчика 6, первым выходом блока 14 предварительной обработки, первым выходом блока 18 уставок и выходом блока 15 оптимальной обработки, первый выход - с первым входом блока 17 расчета потребного угла поворота руля, а второй выход - с вторым входом блока 7 расчета характеристик продольного движения.
Второй вход блока 17 расчета потребного угла поворота руля соединен с выходом датчика скорости 1, а выход - с входом исполнительного механизма 9 поворта руля и первым входом блока 19 индикации, второй вход которого соединен с выходом блока 7 расчета характеристик продольного движения 7. Выход пеленгатора 5 через второй выход блока 14 предварительной обработки, первый, второй и третий входы которого соединены с выходами блока 11 расчета угла крена, второго датчика 3 угловой скорости и вторым выходом блока 18 уставок соединен с вторым входом блока 15 оптимальной обработки, третий, четвертый и пятый входы которого соединены с первым и вторым выходами локационного датчика 6 и третьим выходом блока уставок, четвертый выход которого соединен с первым входом блока 11 расчета угла крена, второй вход которого соединен с первым датчиком 2 угловой скорости, а выход - с первым входом логического блока 12, второй вход которого соединен с выходом блока 13 расчета предельных параметров, а выход - с вторым входом исполнительного механизма 8 разгона и торможения 8. При этом первый вход блока 13 расчета предельных параметров соединен с датчиком 10 угла поворота руля, который механически соединен с исполнительным механизмом 9 поворота руля, а второй и третий входы - с выходом датчика скорости 1 и пятым выходом блока уставок 18.
Исполнительный механизм 9 руля представляет из себя следящий электропривод, построенный на основе моментного двигателя. Вход его соединен с выходом сигнала потребного угла поворота руля αпотр с блока 17 расчета потребного угла поворота руля.
Датчик 10 угла поворота руля представляет из себя сельсин-датчик, потенциометрический или датчик другого типа, ротор которого жестко скреплен с рулевой колонкой.
Блок 11 расчета угла крена представляет из себя интегратор с управляемым сбросом, на вход которого поступает сигнал угловой скорости продольной оси автомобиля ωγ с датчика 2 угловой скорости. Сброс интегратора в нулевое положение осуществляется по входу блока 11, который соединен с выходом блока 18 уставок. Выходом блока 11 является значение угла γ крена автомобиля.
Логический блок 12 (фиг. 2) состоит из компараторов 20, 21. Входы компаратора 20 и первый из входов компаратора 21 соединены с выходом блока 13 расчета предельных параметров, выход компаратора - с вторым входом компаратора 21, третий вход которого соединен с выходом блока 11, а выход компаратора 21 является выходом блока 12 в целом. Сигнал на выходе блока 12 может принимать значения:
"+1", если Мзад*<Ммакс* и γ < γмакс;
"0", если Мзад* ≥Ммакс* и γ < γмакс;
"-1", если γ ≥ γмакс, что соответствует командам "Разгон разрешен". "Разгон запрещен" и "Торможение", поступающим на вход исполнительного механизма 8.
Блок 13 расчета предельных параметров (фиг. 3) содержит делители 22, 23, генератор 24 функции "arctg", умножители 25, 26 и квадратор 27. Блок 13 реализует следующие формулы:
γмакс= arctg(0,5 b/f), (1) где γмакс - предельный угол крена автомобиля, при котором не наступает опрокидывание;
b - ширина автомобиля;
f - высота центра тяжести автомобиля над дорогой,
Мзад*= αтек ˙ V2, (2) где Мзад* - значение опрокидывающего момента, отнормированное по весу автомобиля;
αтек - текущее значение угла поворота руля;
V - скорость движения автомобиля; , (3) где αмакс - предельный угол поворота руля, при котором в данных условиях не наступает опрокидывание;
, (3) где αмакс - предельный угол поворота руля, при котором в данных условиях не наступает опрокидывание;
К - коэффициент, зависящий от качества дорожного покрытия, конструкции рулевого механизма и т. д. ;
Ммакс* - предельное значение нормированного опрокидывающего момента.
Блок 14 предварительной обработки представляет из себя микропроцессор, в котором происходит обработка сигнала угла ϕ пеленга встречного автомобиля с пеленгатора 5 и сигнала ωΨ угловой скорости вертикальной оси автомобиля с датчика 3. Угол пеленга, измеряемый в системе координат, связанной с автомобилем, пересчитывается в инерциальную систему координат через направляющие косинусы, определяемые через углы поворота осей автомобиля γ , Ψ согласно формулам: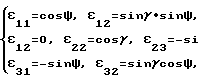 n
n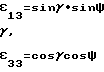 (4)
(4)
Блок 15 оптимальной обработки (фиг. 4) содержит умножители 28-31, блок 32 деления, сумматоры 33-35, интеграторы 36, 37 управляемым сбросом, диодный выпрямитель 38 и компараторы 39-42.
В блоке 15 реализованы следующие уравнения:
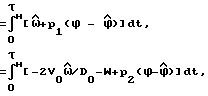 (5) где
(5) где  - оценка угла пеленга;
- оценка угла пеленга; - оценка угловой скорости линии пеленга;
- оценка угловой скорости линии пеленга;
ϕ- вычисленное в блоке 14 значение угла пеленга;
Vо - относительная скорость автомобиля;
Do - относительная дальность;
W - боковое ускорение автомобиля;
р1, р2 - коэффициенты усиления;
τн - период наблюдения.
Для реализации уравнений (5) в блоке 15 используются: умножитель 28, блок 32 деления, сумматоры 33, 35 и интеграторы 36, 37. Коэффициент передачи первого входа сумматора 35 равен -2. На сумматоре 34 определяется разность измеренного и оцениваемого значений угла пеленга (ϕ -  ). В зависимости от абсолютного значения этой разности происходит определение и подстройка коэффициентов усиления р1 и р2. Для этого используются умножители 23-31 и компараторы 39-42. Коэффициент передачи умножителей 30, 31 равен 1000.
). В зависимости от абсолютного значения этой разности происходит определение и подстройка коэффициентов усиления р1 и р2. Для этого используются умножители 23-31 и компараторы 39-42. Коэффициент передачи умножителей 30, 31 равен 1000.
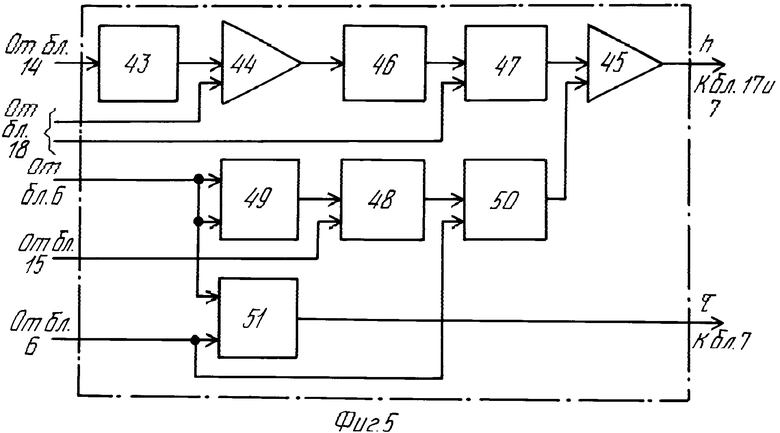
Блок 16 расчета параметров безопасного разъезда (фиг. 5) содержит диодный выпрямитель 43, сумматоры 44, 45, генератор 46 функции "sin", умножители 47, 48, квадратор 49 и блоки 50, 51 деления. Устройство блока 16 регламентируется следующими соотношениями: (6) где Δ h - запас дистанции на безопасный разъезд;
(6) где Δ h - запас дистанции на безопасный разъезд;
d - длина диагонали автомобиля;
Ψ - угол поворота вокруг вертикальной оси автомобиля;
δ - угол, тангенс которого равен отношению ширины автомобиля к его длине;
h - "мгновенная" (при данных параметрах движения) дистанция между автомобилями при разъезде.
Блок 17 расчета угла поворота руля содержит квадратор, умножитель и делитель и вычисляет потребный угол поворота руля αпотрпо формуле:
αпотр = 3h/( τ ˙V2), (7) где τ - время, оставшееся до разъезда.
Величины h и τ поступают на вход блока 17 от блока 16, значение скорости V - с датчика 1.
Блок 18 уставок представляет из себя группу делителей напряжения, сигналы на выходе которых перед началом движения выставляются равными значениям параметров конкретного автомобиля и трассы. Также перед началом движения из блока уставок поступает сигнал сброса на интеграторы блоков 11, 15.
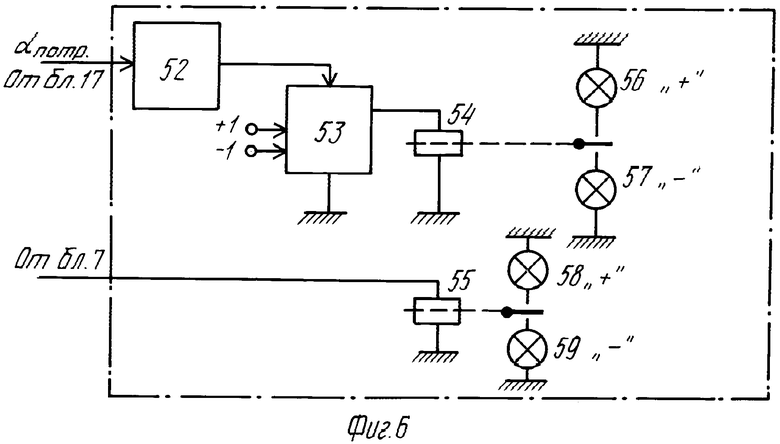
Блок индикации 19 (фиг. 6) включает в себя дифференциатор 52, компаратор 53, поляризованные реле 54, 55 и индикационное табло с лампочками 56-59 подсвета.
Устройство работает следующим образом.
Изменение текущих параметров движения (собственной скорости V, угловой скорости продольной оси ωγ , угловой скорости вертикальной оси ωΨ , линейного ускорения W, относительной дальности Do, относительной скорости Vo и угла пеленга ϕ ) автомобилей непрерывно фиксируется датчиками 1-4, 6 и пеленгатором 5. В блоке 11 расчета угла крена по сигналу угловой скорости продольной оси ωγ с датчика угловой скорости 2 рассчитывается угол крена автомобиля
γ =  dt (8)
dt (8)
В блоке предварительной обработки 14 определяется угловое положение ϕ встречного автомобиля в инерциальной системе координат по сигналу с пеленгатора 5, углу крена γ с блока 11 и углу поворота корпуса Ψ согласно формулам (4). Угол поворота корпуса автомобиля определяется интегрированием угловой скорости вертикальной оси ωΨ, измеряемой датчиком 3
χ =  dt (9)
dt (9)
В блоке 15 по значениям угла пеленга ϕ с блока 14, линейного ускорения W с датчика 4 и относительных величин Do, Vo с датчика 6 оценивается величина угловой скорости линии пеленга  в соответствии с выражением (5). Блок 15 представляет из себя двухмерный адаптивный фильтр с автоматической подстройкой коэффициентов усиления.
в соответствии с выражением (5). Блок 15 представляет из себя двухмерный адаптивный фильтр с автоматической подстройкой коэффициентов усиления.
Подстройка коэффициентов усиления р1, р2 по величине углового рассогласования происходит следующим образом. Величина рассогласования измеренного значения угла пеленга и его оценки (ϕ -  ) с выхода сумматора 34 (фиг. 4) поступает через выпрямитель 38 на управляющий вход компараторов 39, 41 и при превышении величины уставки по второму управляющему входу (0,001) на выход компаратора 39 поступает сигнал с выхода умножителя 30, равный p
) с выхода сумматора 34 (фиг. 4) поступает через выпрямитель 38 на управляющий вход компараторов 39, 41 и при превышении величины уставки по второму управляющему входу (0,001) на выход компаратора 39 поступает сигнал с выхода умножителя 30, равный p -
-  1000 , а на выход компаратора 41 - сигнал с выхода умножителя 31, равный p
1000 , а на выход компаратора 41 - сигнал с выхода умножителя 31, равный p -
-  1000 . Если сигнал на управляющем входе компараторов 39, 41 меньше уставки 0,001, то на выход компараторов поступает сигнал р1 и р2 соответственно без изменений. Ограничение коэффициентов р1 и р2 реализуется на компараторах 40 и 42 соответственно. Сигнал р1 с выхода компаратора 39 проходит на выход пеленгатора 40 без изменений, если величина р1 меньше величины уставки (100) по второму управляющему входу. Если р1>100, то на выходе компаратора 40 сигнал ограничивается величиной 100. Аналогично на выходе компаратора 42 происходит ограничение коэффициента р2 на уровне 1000.
1000 . Если сигнал на управляющем входе компараторов 39, 41 меньше уставки 0,001, то на выход компараторов поступает сигнал р1 и р2 соответственно без изменений. Ограничение коэффициентов р1 и р2 реализуется на компараторах 40 и 42 соответственно. Сигнал р1 с выхода компаратора 39 проходит на выход пеленгатора 40 без изменений, если величина р1 меньше величины уставки (100) по второму управляющему входу. Если р1>100, то на выходе компаратора 40 сигнал ограничивается величиной 100. Аналогично на выходе компаратора 42 происходит ограничение коэффициента р2 на уровне 1000.
Блок 16 расчета параметров безопасного разъезда определяет величины τ и h согласно формулам (6) и передает их в блок 7 расчета характеристик продольного движения и блок 17 расчета угла поворота руля. В блоке 7 по сигналам Do, Vo и τ вырабатывается сигнал управления на исполнительный механизм разгона и торможения также, как в известном устройстве, принятом за прототип.
Одновременно с управлением продольным движением в блоке 17 расчета потребного угла поворота руля обрабатывается информация, необходимая для работы рулевого управления. Блок 17 вырабатывает сигнал αпотр в соответствии с соотношением (7). Квадратор вырабатывает сигнал V2, умножитель - τ ˙ V2, который поступает на вход блока деления вместе с сигналом h с блока 16.
Блок деления формирует сигнал потребного угла поворота руля αпотр , подаваемый на исполнительный механизм руля и на вход блока индикации 19 (фиг. 6). Дифференцирование αпотр в дифференциаторе 52 дает положительную или отрицательную величину, которая через компаратор 53 создает сигнал на обмотке поляризованного реле 54. Контакты реле замыкаются и подключают "+" лампочку, сигнализирующую водителю о необходимости увеличения угла поворота (разгоне в боковом направлении) или "-" лампочку, сигнализирующую водителю о необходимости уменьшения угла поворота руля (торможении в боковом направлении).
С блока 7 поступает сигнал на поляризованное реле 55, контакты которого, замыкаясь, подключают лампочки, сигнализирующие водителю о необходимости разгона или торможения в продольном направлении. Действительное (отработанное исполнительным механизмом) значение угла поворота руля через датчик 10 поступает на блок 13 расчета предельных параметров, где в соответствии с формулами (1)-(3) рассчитываются предельное значение нормированного опрокидывающего момента Ммакс*, предельный угол крена γмакс и значение нормированного опрокидывающего момента Мзад*, предельный угол крена макс и значение нормированного опрокидывающего момента Мзад*, соответствующего текущей скорости автомобиля.
Информация с блока 13 поступает в логический блок 12, где в зависимости от соотношения входных величин вырабатывается одна из команд "Разгон разрешен", "Разгон запрещен" или "Торможение", которая и поступает на исполнительный механизм разгона и торможения 8.
Использование изобретения позволит снизить вероятность столкновения автомобилей в аварийных ситуациях почти в 5 раз (получено моделированием); обеспечить достижение экономического эффекта в случае массового применения предлагаемого устройства через несколько лет после начала его внедрения. Оценка экономического эффекта Э может быть проведена по формуле (не учитывается прибыль от продажи устройства)
Э= Квер˙ Т-1 [NaSaT-NсSc-Sp] , где Квер - коэффициент, учитывающий вероятность попадания автомобиля, снабженного предлагаемым устройством, в аварийную ситуацию;
Т - период эксплуатации Nс автомобилей, снабженных предлагаемым устройством;
Na - среднее число аварий в год;
Sa - средний ущерб (в руб. ) от одной аварии;
Sc - затраты (в руб. ) на производство предлагаемого устройства при массовом производстве;
Sp - стоимость (в руб. ) разработки устройства.
По данному техническому предложению на предприятии разработана и программно реализована на ЭВМ ЕС 1066 имитационная модель встречного движения автомобилей, один из которых оборудован предлагаемым устройством. Проведенное моделирование показало, что для автомобиля с предлагаемым устройством расстояние между ним и встречным автомобилем при разъезде составляет ≈ 0,25-0,4 м (если встречный автомобиль специально направлялся на столкновение). При моделировании разъезда автомобилей не оборудованных предлагаемым устройством вероятность столкновений составила ≈0,58; а с предлагаемым устройством ≈0,12. (56) 1. Максимов М. В. , Горгонов Г. И. Радиоэлектронные системы самонаведения. М. : Радио и связь, 1982, с. 145.
2. Авторское свидетельство СССР N 1632820, кл. В 60 К 31/00, 1991.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АКТИВНОЙ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2137621C1 |
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |
| СПОСОБ СЕЛЕКЦИИ СИГНАЛОВ ОТ ОБЪЕКТОВ, СБЛИЖАЮЩИХСЯ С ТРАНСПОРТНЫМ СРЕДСТВОМ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032186C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| Яхтенный авторулевой | 1981 |
|
SU1020311A1 |
| ИНТЕГРИРОВАННАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2327188C1 |
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |
| Устройство для поддержания безопасной дистанции между автомобилями в потоке | 1989 |
|
SU1699827A1 |
Использование: изобретение относится к системам автоматического управления подвижным объектом, использующим пеленгатор. Сущность изобретения: устройство снабжено исполнительным механизмом поворота руля, датчиком угла поворота руля, блоком расчета угла крена, логическим блоком, блоком расчета предельных параметров, блоком предварительной обработки, блоком оптимальной обработки, блоком расчета параметров безопасного разъезда, блоком расчета потребного угла поворота руля, блоком уставок, блоком индикации. Датчики угловой скорости установлены по продольной и вертикальной осям, датчик линейного ускорения - по поперечной оси автомобиля, а его выход соединен с первым входом блока оптимальной обработки и первым входом блока расчета параметров безопасного разъезда. Один из входов блока расчета потребного угла поворота руля соединен с выходом датчика скорости, а выход - со входом исполнительного механизма поворота руля и входом блока индикации. Первый вход блока расчета предельных параметров соединен с датчиком угла поворота руля, который механически соединен с исполнительным механизмом руля. 6 ил.
УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ АВТОМОБИЛЯ В АВАРИЙНЫХ СИТУАЦИЯХ, содержащее датчик скорости, первый и второй датчики угловой скорости, датчик линейного ускорения, пеленгатор, локационный датчик, первый и второй выходы которого через блок расчета характеристик продольного движения соединены с первым входом исполнительного механизма разгона и торможения автомобиля, отличающееся тем, что оно снабжено исполнительным механизмом поворота руля, блоком расчета угла крена, логическим блоком, блоком расчета предельных параметров, блоком предварительной обработки, блоком оптимальной обработки, блоком расчета параметров безопасного разъезда, блока расчета потребного угла поворота руля, блоком уставок, блоком индикации, при этом первый и второй датчики угловой скорости установлены по продольной и вертикальной осям, датчик линейного ускорения - по поперечной оси автомобиля, и его выход соединен с первым входом блока оптимальной обработки и первым входом блока расчета параметров безопасного разъезда, второй, третий, четвертый, пятый и шестой входы которого соединены соответственно с первым и вторым выходами локационного датчика, первым выходом блока предварительной обработки, первым выходом блока уставок и выходом блока оптимальной обработки, первый выход - с первым входом блока расчета потребного угла поворота руля, а второй выход - с вторым входом блока расчета характеристик продольного движения, при этом второй вход блока расчета потребного угла поворота руля соединен с выходом датчика скорости, а выход - с входом исполнительного механизма поворота руля и первым входом блока индикации, второй вход которого соединен с выходом блока расчета характеристик продольного движения, выход пеленгатора через второй выход блока предварительной обработки, первый, второй и третий входы которого соединены с выходами блока расчета угла крена, второго датчика угловой скорости и вторым выходом блока уставок, соединен с вторым входом блока оптимальной обработки, третий, четвертый и пятый входы которого соединены с первым и вторым выходами локационного датчика и третьим выходом блока уставок, четвертый выход которого соединен с первым входом блока расчета угла крена, второй вход которого соединен с первым датчиком угловой скорости, а выход - с первым входом логического блока, второй вход которого соединен с выходом блока расчета предельных параметров, а выход - с вторым входом исполнительного механизма разгона и торможения, при этом первый вход блока расчета предельных параметров соединен с датчиком угла поворота руля, который механически соединен с исполнительным механизмом поворота руля, а второй и третий входы - с выходом датчика скорости и пятым выходом блока уставок.
