(54) АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1994 |
|
RU2074491C1 |
| НАСОСНАЯ УСТАНОВКА | 2008 |
|
RU2370671C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ ГОРНОРУДНОЙ МЕЛЬНИЦЫ СИСТЕМЫ ПРЯМОГО ПРИВОДА | 2010 |
|
RU2417505C1 |
| Асинхронный электродвигатель | 1990 |
|
SU1772874A1 |
| Многороторный асинхронный электродвигатель | 1981 |
|
SU983921A1 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ С ПРИВОДОМ ОТ ЛИНЕЙНОГО ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ | 2016 |
|
RU2630026C1 |
| Устройство для задания моментов | 1976 |
|
SU564549A1 |
| Электродвигатель с катящимся дисковым ротором | 1986 |
|
SU1363396A1 |
| Скважинная насосная установка | 2015 |
|
RU2615775C1 |
| Асинхронный электродвигатель | 1988 |
|
SU1598065A1 |

I
Изобретение относится к электрическим машинам и может быть использовано в реверсируемых электроприводах, работающих в условиях вакуума, при высоких температурах, в присутствии химически активных сред. Целесообразно использование двигателя в медицинском оборудовании.
Наиболее близким по технической сущности к предлагаемому является асинхронный линейный электродвигатель, содержащий статор с разомкнутым магнитопроводом и распределенной в его пазах обмоткой, подвижный элемент с проводящей активной зоной и корпус 1.
Недостатками двигателя являются пониженная надежность и ограниченные функциональные возможности из-за наличия направляющих подщипников, в которых закреплен подвижный элемент.
Цель изобретения - повыщение надежности двигателя и расщирение его функциональных возможностей.
Поставленная цель достигается тем, что подвижный элемент прикреплен к корпусу посредством пластинчатой пружины, плоскость которой перпендикулярна направлению его движения, причем пружина одним
концом заделана в подвижный элемент, а другим - в корпус с возможностью регулирования ее активной длины.
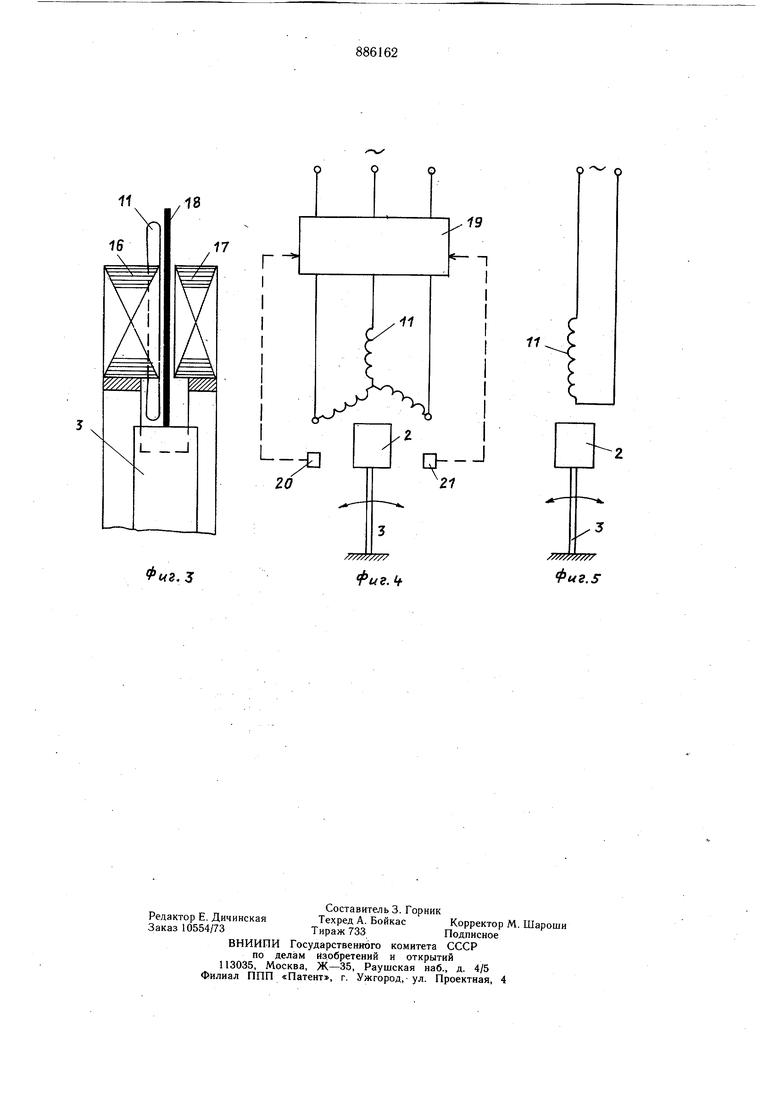
На фиг. 1 изображен предлагаемый двигатель, поперечный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - двигатель 5 с плоским подвижным элементом, разрез; на фиг. 4 - двигатель при трехфазном питании, электрическая схема; на фиг. 5 - то же, при однофазном питании.
Двигатель содержит статор 1, подвижный элемент 2 и пластинчатую пружину 3, заделанную одним концом в подвижный элемент и другим концом в статор. Статор 1 имеет разомкнутый магнитопровод, состоящий из двух внещних сердечников 4 и 5
5 и внутреннего сердечника 6 (фиг. 1 и 2). Все сердечники выполнены щихтованными и закреплены на консольных выступах 7-9 корпуса 10. На сердечниках 4 и 5 размещается плоская распределенная обмотка 11, состоящая из двух симметричных частей.
20 Примерная форма секций обмотки показана пунктиром на фиг. 2.
Подвижный элемент 2 выполнен в виде металлического короба, боковые активные
стороны которого помещены в зазоры между сердечниками .
Пластинчатая пружина 3 выполнена из упругой стали и закреплена на корпусе с возможностью регулирования ее активной длины путем вертикального перемещения. Пружина фиксируется накладкой 12, которая крепится винтами 13 к корпусу 10. Механическая нагрузка сопрягается с подвижным элементом, например с помощью выступа 14 или с пружиной 3. На фиг. 2 пунктиром показано механическое сопряжение пружины 3 с двумя сильфонными устройствами 15.
Возможно выполнение двигателя с двумя сердечниками 16 и 17 на статоре между которыми помещен плоский подвижный элемент 18, скрепленный с пластинчатой пружиной 3 (фиг. 3).
Двигатель может иметь трехфазное или однофазное питание переменным током.
При трёхфазном питании (фиг. 4) обмотка 11 подключена к сети через блок 19 управления, предназначенный для переключения последовательности фаз при реверсе по сигналам от датчиков 20 и 21 положения подвижного элемента 2.
При однофазном питании (фиг. 5) обмотка 11 подключена к сети непосредственно.
Двигатель работает следующим образбм.
При трехфазном питании за счет изменения направления бегущего магнитного поля, создаваемого обмоткой 11, подвижный элемент, взаимодействуя с магнитным полем, соверщает колебания и передает механическую энергию нагрузке.
Запуск двигателя при однофазном питании может быть осуществлен либо с помощью дополнительной пусковой обмотки, либо - механического импульса.
При этом после начала движения на подвижный элемент действует электромагнитная сила F, обусловленная прямо бегущей волной пульсирующего магнитного поля. Сила F должна быть больще суммы сил сопротивления нагрузки F и сопротивления пружины 1 1р-По мере отклонения подвижного элемента oj положения равновесия t-np. возрастает, + FH становится больще F и вторичный элемент останавливается. При этом сила F становится равной нулю и подвижный элемент начинает движение в обратном направлении под действием силы упругости деформированной пружины. Очевидно, что при однофазном питании отпадает необходимость, в использовании блока управления и датчиков положения. Изменяя длину Q пружины можно регулировать частоту колебаний подвижного элемента, при постоянной частоте питания.
Таким образом, прикрепление подвижного элемента к корпусу посредством пластинчатой пружины позволяет отказаться от применения направляющих подщипников, обеспечить регулирование частоты колебаний при постоянной частоте питания, что обеспечивает повыщение надежности и расщирение функциональных возможностей двигателя.
Формула изобретения
Асинхронный электродвигатель, содержащий разомкнутый магнитопровод статора, в пазах которого уложена распределенная обмотка, подвижный элемент, имеющий подводящую активную зону, и корпус, отличающийся тем, что, с целью повыщения
надежности и расщирения функциональных возможностей, подвижный элемент прикреплен к корпусу посредством пластинчатой пружины, плоскость которой перпендикулярна направлению его движения, причем пружина одним концом заделана в подвижныи элемент, а другим - в корпус с возможностью регулирования ее активной длины.
Источники информации, принятые во внимание при экспертизе 1. Свечарник Д. В. Линейный электропривод. М., «Энергия, 1979, с. 38, рис. 2-3
Фчг.З
р о
Фuг.s
