(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ ДВИЖУЩИХСЯ Изобретение относится к технике линейных измерений, а именно к средствам для измерения длины движущихся изделий, и может быть использовано, например, для автоматизации измерений на технологических агрегатах прокатных производств Известно устройство для контроля длины движущегося изделия, содержащее подгжатый к изделию мерный обкатной ропвк (или систему роликов), датчик импульсов длины, счетчик числа импульсов, пслучаемых от датчика импульсов обкатного ролв ка и узел отсчета . Однако, если изделия не велики по длине и свободно располагаются на несущей поверхности транспортирующего механизма (например, на ленте тра юпортера, рольганге и т.п.), использование обкатного ролика для измерения дпивы кздепий приводит к снижению точности измерения. Навбопее близким по технической сущности к изобретению является устройство Г2, содержащее два датчика положения измеряемого изделия, установленных по
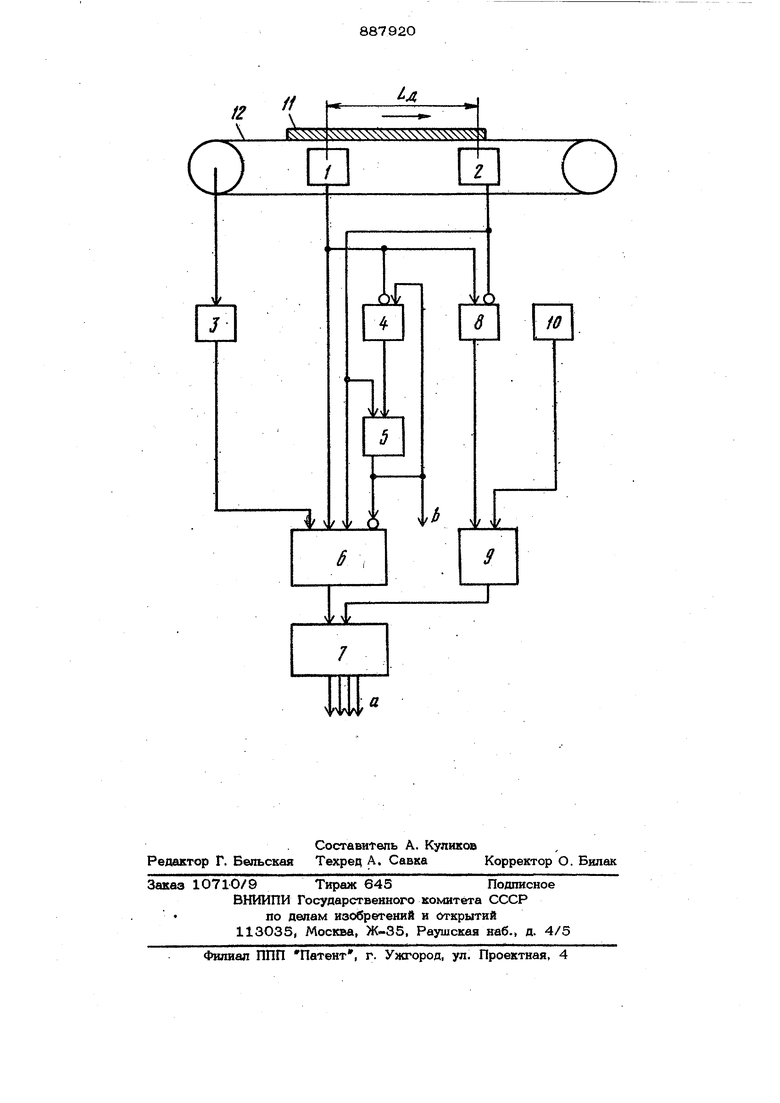
ИЗДЕЛИЙ оси транспортирующего механизма в направлении движения на расстоянии один от другого, несколько меньшем наименьшей длины взм яемых изделий, преобразователь частоты 1фащения элемента кинематики транспортирующего механизма в частоту импульса, счетчик, многовходо- вую в ггияьную схему и блок набора кода расстояния между датчиками положения. . Известное устройство содержит также два блока задания кода, делитель частот и другие элементы, т.е. является доста точно сложным по своей структуре. Кроме того, устройство не позволяет производить измерения при расстоянии между измеряемыми изделиями, меньшем расстояния между крайними датчиками положения, что налагает определенные ограничения на производительность транспортирующего механизма. Цель изобретения - производство из-мерений при расстоянии между изделиями меныием, чем расстояние между датчиками положения, и упрощение устройства 38 при обеспечении высокого быстродействия и точности измерения. Эта цель достигается тем, что устройство снабжено четырехвходовым элементом И, один из входов которого является инвертирзтошим, первым двухвходовым элементом И с прямыми входами, вторым двухБходовым элементом И с прямым и инвертирующим входами и двухвходовым элементом ИЛИ с прямым и инвертирующим входами, прямые входы четырехвходо вого элемента И соединены соответствен™ но с выходом преобразователя частоты и с выходами первого и второго датчиков положения, а инвертирующий вход - с выходом первого двухвходового элемента И, один вход которого соединен с выходом второго датчика положения, а другой - с выходом элемента ИЛИ, к инвертирующему входу которого подключен выход первого датчика положения, а к прямому выход первого двухвходового элемента И, информационные входы многовходовой вентильной подключены к блоку набора кода, а управляющий вход - к выходу второго 1 элемента И, к прямому входу которого подключен выход первого датчика положения, а к инвертирующему - второго, выходы многовходовой вентильной схемы подключены к кодовым входам счет чика, счетный вход которого пош пючен к выходу чётырехвходового элемента И. На чертеже показана функциональная схема предлагаемого устройства. Устройство содержит первый датчик 1 положения измеряемого изделия, второй датчик 2 положения измеряемого изделия преобразователь 3 частоты вращения эле мента конструкции транспортирующего механизма в частоту ик шульсов, элемент 4 ИЛИ с одним прямым и одним инвертирующим входами, первый двухвходовой элемент 5 И, четырехвходовой элемент : б И, у которого один из входов - инвертирующий, счетчик 1 с записью информац1Ш через кодовые входы, второй двухвхо довой элемент 8 И, у которого один вход прямой, а другой инвертирующий, много входовую вентильную схему 9 и блок 10 задания кода расстояния между датчиками положения. На схеме индексом в отмечены информационные выходы счетчика 7, а индексом 3 - выход элемента 5, ешгаичное значение сигнала на котором :указывает на. окончание измерения. Элементы 4- и 5 Образуют память, на выходе которой в исходном состоянии устройства сохраняется сигнал нулевого уровня. 20 Устройство работает следующим образом. . Измеряемое изделие 11, перемещаясь транспортирующим механизмом 12 в на правлении, указанном на чертеже стрелкой, воздействует сначала на датчик 1, а затем на датчик 2. При воздействии изделия на датчик 1 на выходе элемента 8 И возникает сигнал,который поступает на управляющий вход многовходовой вентильной схемы 9, вызывая тем самым запись в счетчик 7 через кодовые входы кода расстояния между датчиками 1 и 2 положения, установленного в блоке Ю задания кода. После воздействия изделия на датчик 2 на входах элемента 6 И собираются условия для прохождения импульсов с преобразователя 3 частоты вращения элемента кинематики транспортирующего механизма 12 на счетный вход счетчика 7. Импульсы с преобразователя 3 суммируются в счетчике 7 с заданным в нем кодом расстояния между датчиками 1 и 2 до тех пор, пока изделие воздействует на оба датчика положения. Как только изделие прощло датчик 1, поступление импульсов от преобразователя 3 в счетчик 7 прекращается. При этом в счетчике 7 будет записано число, равное сумме кода расстояния между датчиками 1 и 2 положения и числа импульсов от преобразователя 3, насчитанного счетчиком 7 за время, в течение которого измеряемое изделие воздействовало на оба датчика положения. Это число равно измеренной длине изделия в единицах, определяемых ценой импульса преобразователя 3. Как только изделие прошло датчик 1 положения, на выходе памяти, образованной элементами 4 и 5, появляется единичный сигнал, который снимает тем самым раэрещение с инверпфующего входа элемента 6 И, и последующее изделие, воздействующее на датчик 1, не вызовет записи кода расстояния в счетчик 7 до тех пор, пока предшествующий лист не сойдет, с датчика 2. Одновременно появление единичного сигнала на выходе элемента 5 указывает на окончание измерения длины изделия и может быть использовано дпя переписки информации с выходов счетчика во внешние устройства отображения и регистрации полученной информации о длине измеряемых изделий. Таким образом, наличие памяти на элементах 4 и 5 позволяет измерять двилогщиеся изделия при таком расстоянии между ними, при котором датчики 1 и 2 последовательно успевают вернуться в исходное состояние после прохождения предшествующего листа и вновь сработать под действием последующего. При этом нулевым уровнем сигнала от датчика 1 собирается память на элементах 4 и 5, а нулевым уровнем сигнала от датчика 2 производится запись кода расстояния из блока Ю в счетчик 7. При выборе расстояния LA между датчиками 1 и 2 положения, т.е. расстоя ние между осями датчиков 1 и 2 (или, точнее, между осью, проходящей через точку срабатывания датчика 2, и осью, проходящей через точку возврата датчика 1) следует исходить из того, что это расстояние должно по возможности меньш отличатьсяот средней длине измеряемых изделий L с,р , т. е. ,9F(l,cp-S(5;, где (у - величина среднеквадратичного отклонения длины измеряемых изделий. Например, если Ьср 2000 мм и б 18 мм, то Ij д i 185О мм, а время измерения составит только 7,5% от времени перемещения измеряемого изделия на величину LCP . Это уменьшает вероятность накопления ошибки за время измерения, т.е. обеспечивает высокую точность измерения, а малое время, затрачиваемое на измерение, обеспечивает достаточное быстродействие. В тех случаях, когда измеряются изделия различной длины, датчик 2 положения выполняют перемещающимся или устанавливают несколько датчиков 2, каждый из которых определяет код расстояния между датчиками в своей зоне. Эффективность устройства для измерения длины движущихся изделий состоит в том, что за счет сокращения расстояния между изделиями в единицу времени может быть измерено большее количество изделий при одной и той же скорости их перемещения. Упрощается структура устро ства, в частности путем исключения одного датчика положения, одного блока задания кода и управляемого делителя частоты Устройство обеспечивает высокое быст родействие благодаря тому, что все вспом гательные операции - ввод кода расстояния и вывод результата измерения-совмешаются с движением изделий над датчика ми, и высокую точность измерения за сче существенного уменьшения измеряемой длины и, следовательно, уменьшения по.грешности от прсскальзывания изделия на несущей поверхности транспортирующего механизма. Формула изобретения Устройство для измерения длины движущихся изделий, содержащее два датчика положения измеряемого изделия, установленных по оси транспортирующего механизма в направлении движения на расстоянии один от другого, несколько меньшем наименьшей дтшны измеряемых изделий, преобразователь частоты вращения элемента кинематики транспортирующего механизма в частоту импульсов, счетчик, многовходовую вентильную схему и блок набора кода расстояния между датчиками положения, отличающееся тем, что, с целью производства измерений при расстоянии между изделиями меньшем, чем расстояние между датчиками положения, и упрощения устройства при обеспечении высокого быстродействия и точности измерений, оно снабжено четьфехвходовым элементом И, один из входов которого является инвертирующим, первым двухвходовым элементом И с прямыми входами, вторым двухвходовым элементом И с прямым и инвертирующим входами и двухвходовым элементом ИЛИ с и инвертирующим входами, прямгле входы четырехвхоДового элемента И соединены соответственно с выходом преобразователя частоты и с выходами первого и второго датчиков положения, а инвертирующий вход с выходом первого двухвходового элемента И, один вход которого соединен с выходом второго датчика положения, а другой с выходом элемента ИЛИ, к инвертирую, щему входу которого подключен выход первого датчика положения, а к прямому выход первого двухвходового элемента .И, информационные входы . многовходовой вентильной схемы подключены к блоку набора кода, а управляющий вход - к выходу второго двухвходового элемента И, к прямому входу которого подключен выход датчика положения, а к инвертирующему второго, выходы многовходовой вентильной схемы подключены к кодовым входам счетчика, счетный вход которого. подкгао- чен к выходу четырехвхопового элемента И. Источники информации, принятые во внимание при экспертизе 1.Иванов Б. И. Измерение линейных размеров методом обкатывания роликов. М., Машиностроение, 1973, с. 43-4.8. 2.Авторское свидетельство СССР № 679786, кл. q 01 В 7/О4, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения длины движущихся изделий | 1984 |
|
SU1224560A1 |
| Устройство для измерения длины транспортируемых изделий | 1984 |
|
SU1226022A1 |
| ИЗМЕРИТЕЛЬ НЕСУЩЕЙ ЧАСТОТЫ РАДИОСИГНАЛОВ | 1994 |
|
RU2094810C1 |
| Устройство для контроля качества межслойных соединений печатной платы | 1978 |
|
SU781722A1 |
| Устройство для измерения концентрации пыли в воздухе | 1985 |
|
SU1257477A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1751836A1 |
| Устройство для управления -фазным вентильным преобразователем | 1974 |
|
SU553722A1 |
| Устройство для измерения концентрации озона в воздухе-кислороде | 1980 |
|
SU938119A1 |
| Устройство для автоматического счета подвижных объектов | 1975 |
|
SU658023A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОКА | 1998 |
|
RU2147131C1 |