Изобретение относится к области весоизмерительной техники. Известны весы с электромагнитным уравновешиванием, содержащие электромаг нит с двумя обмотками и укрепленным на 1 плоской пружине якорем, источник питаНИН с управляютщм входом, ждущий мультивибратор, программный блок и регистрирующий прибор Эти весы имеют низкую точность, обусловленную зависимостью максимального значемя тока в обмотке электромагнита от веса груза. Ближайщими по технической сущности являются весы с электромагнитным уравновещкванием, содержащие электромагОТт, рабочая обмотка которого подключена к выходу регулируемого источника питания через переключатель и через модулятор и переключатель, а дополнительная обмотка электромагнита подключена к входу первого одновибратора, выход которого соединен с одним входом регистрирующего прибора, другой вход которого подключен к выходу регулируемого источника питания, и программный блок, один выход которого подключен к входу одновибратора, выход которого связан с управляющим входом переключателя 2. Известные весы не обеспечивают необходимую точность измерения, что обусловлено неконтролируемыми изменениями намагниченности материала магнитопровода и якоря электромагнита в период между измерениями И погрешностью связанной с конечным быстродействием регистрирукн. щего прибора. Цель изобретения - повышение точности. Для этого в весы с электромагнитным уравновещиванием введены третий и четвертый одновйбраторы и первая и вторая схемы И, причем выход дополнительной обмотки электромагнита подключен к входу четвертого одновибратора, выход которого связан с первым входом второй схемы И, второй вход которой и вход третьего оД- новибратбра соединены с выходом второго
о;1новибратора, а выходы третьего одно- вибратора, подключены к третьему входу второй схемы И и к первому входу первой схемы И, второй вход которой подключен к другому выходу программного блока, а выходы первой и второй схем И подключены к упра:вляющим входам регулируемого источника питания.
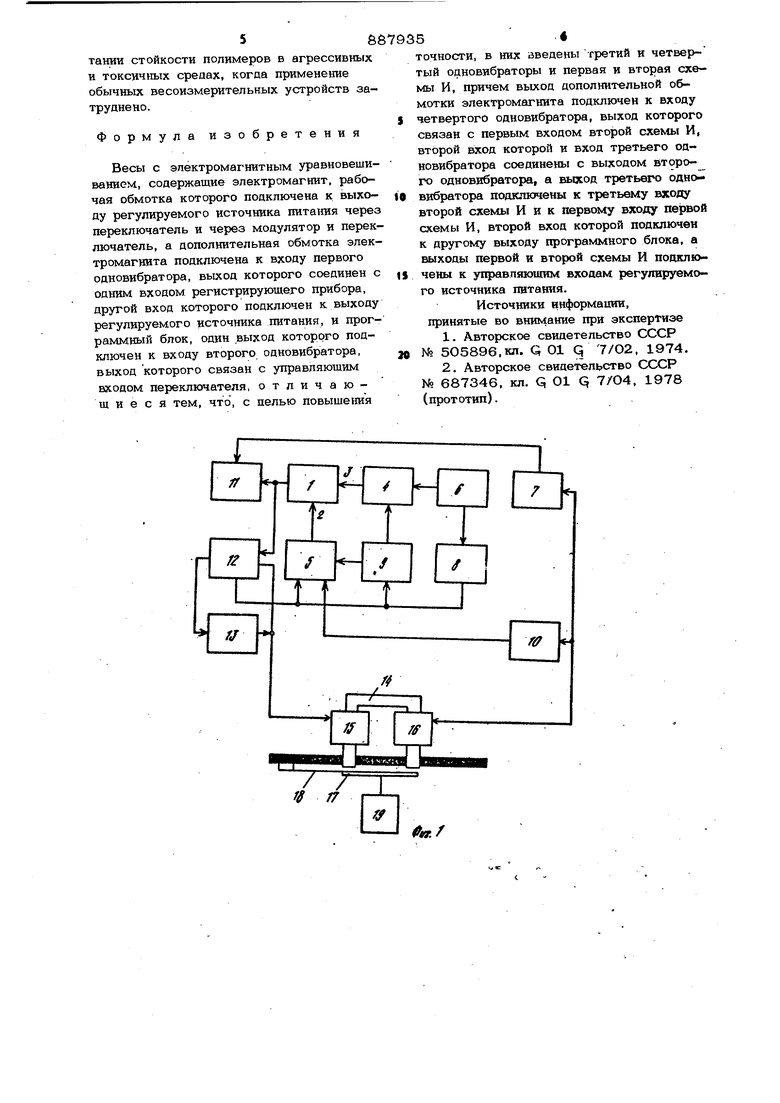
На фиг. 1 представлена структурная схема весов с электромагнитным уравновешиванием; на фиг. 2 - временная диаграмма изменения тока в рабочей обмотке в процессе измерения.
Весы состоят из управляемого источника питания 1 со входами 2 и 3 управления соответственно нарастанием и понижением напряжения, первой 4 и второй 5 схем И, программного блока 6, первого 7 второго 8, третьего 9 и четвертого 10 одновибраторов, регистрирующего прибора 11, переключателя 12, модулятора 13 и электромагнита 14 с рабочей 15 и дополнительной 16 обмотками и якорем 17, укрепленным на плоской пружине 18. К якорю 17 подвешен контролируемый образец 19.;
Весы работают следующим образом. Источ тк питания 1 включается по сигналу программного блока 6. При этом запускается второй одновибратор 8, на управпяющиЛ вход 2 источника питайия 1 подается через вторую схему И 5 запрещающий сигнал, напряжение на выходе источника питания 1 начинает плавно понижаться. Переключатель 12 подает сигнал через модулятор 13, .который преобразует его в переменное напряжение с плавно понижающейся до нуля амплитудой, которое поступает на рабочую обмотку 15 электромагнита 14. Затем обеспечивается разма- гничивание магнитопровода и якоря 17 электромагнита 14 непосредственно перед началом измерения, что позволяет снять намагничивание якоря 17, .вызванное различными причинами в период между измерениями, и повысить точность измерения. По заднему фронту сигнала второго одновибратора 8- включается третий одновибра тор 9, который подает через первую 4 и вторую 5 схемы И запрещающий сигнал на управляющие ЕКОДЫ 2 и 3 источника питания 1. Это позволяет удерживать на его выходе нулевое напряжение в течение времени, необходимого для успокоения подвижной системы весов.
После снятия запрета с управляющих входов 2 и 3 на выходе источника гщтания 1 напряжение начинает плавно повышаться, а переключатель 12 подает его, минуя модулятор 13, непосредственно на рабочую обмотку 15 электромагнита 14.
При определенном значении напряжения а следовательно, и тока в обмотке 15 происходит притяжение якоря 17 к полюсам электромагнита 14. При этом в дополнительной обмотке 16 электромагнита 14 индушфуется электрический импульс, поступающий на.вход первого 7 и четвертого 10 одновибратора. По сигналу с четвертого одновибратора 10 нарастание напряжения на выходе источника питания 1 приостанавливается, а по сигналу с выхода первого одновибратора 7 происходит измерение тока прибором 11. Величина тока в момент притяжения якоря 17 зависит от массы контролируемого образца 19 жесткости пружины 18 и параметров электромагнита 14.
Временная диаграмма измерения тока в рабочей обмотке 15 электромагнита 14 приведена на фиг. 2. В течение времени fpgjfA. . определяемого вторым одновибратором 8, через обмотку 15 проходит ток с уменьшающейся амплитудой. По окон-:ашш размагничивания происходит выдержка времени , успокоения колебаний подвижной системы электромагнита 14, состоящей из пружрны 18 и якоря 17. Время f ч(.,п определяется длительностью импульса с третьего одновибратора 9, В течение времени , происходит нарастание тока в обмотке 15 и при притяжении якоря 17 к полюсам нарастание тока в обмотке 15 приостанавливается на время , что необходимо для стабилизации тока на время измерения. Величина , определяется длительностью выходного импульса чет.вертого одновибратора 10.
Стабилизация тока электромагнита 14 в момент измерения повышает точность за счет снижения динамических ошибок, вызванных конечным быстродействием регистрирующего прибора 11. На этом процесс измерения заканчивается, программны блок 6 отключает источник питания 1 и весы переходят в состояние готовности к новому измерению.
Таким образом, весы отличаются высокой стабильностью показаний и точность измерения массы за счет устранения влияния внешних магнитных полей и стабилизации тока электромагнита в момент измерения. Они особенно эффективны при использовании для контроля массы образцов в замкнутом объеме, например при испытании стойкости полимеров в агрессивных и токсичных средах, когда применение обычных весоизмерительных устройств затруднено. эобретения формула и Весы с электромагнитным уравновешиванием, содержащие электромагнит, рабо::Гобмотка которого подключена к вых ду регулируемого источника пита.шя через пеД.ючатель и через модулятор и пер к атель. а дополнительная обмотка электромагнита подключена к входу первого одновибратора, выход которого сс динен с одним входом регистрирующего прибора другой вход которого подключен к выходу дауемого источника питания, и прогГа2.2й блок, один выход -торог.. к входу второго, ««««« ратора, выход которого связан с управляющим входом переключателя, отличающиеся тем. что , с целью повышения S6 очности, Б НИХ введены третий и четверый одновибраторы и первая и вторая осемы И, причем выход дополнительной обмотки эпектромагнита подключен к входу четвертого одновибратора. выход которого связан с первым входом второй схемы И, второй вход которой и вход третьего одновибратора соединены с выходом второго одновибратора, а выход третьего одновибратора подюночены к третьему входу схемы И и к первому входу первой схемы И. второй вход которой подключен к другому выходу программного блока, а выходы первой и второй схемы И nomuiioчены к управпяюигам входам регулируемого источника питания. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство NO 505896.кл.а 01 Q 7/О2. 1974. 2.Авторское свидетельство № 687346. кл. Q 01 q 7/О4. 1978 (прототип).
fe/
| название | год | авторы | номер документа |
|---|---|---|---|
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1015259A1 |
| Весы с электромагнитным уравновешиванием | 1978 |
|
SU687346A1 |
| Устройство для управления электромагнитом | 1988 |
|
SU1511772A1 |
| Устройство для контроля работы электромагнита | 1987 |
|
SU1522316A1 |
| Устройство для определения силовых характеристик электромагнита | 1987 |
|
SU1415264A1 |
| Устройство для контроля электромагнита | 1986 |
|
SU1388832A1 |
| Устройство для управления электромагнитом | 1989 |
|
SU1665413A1 |
| Устройство для управления электромагнитом | 1987 |
|
SU1432620A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2802271C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ (ВАРИАНТЫ) | 1997 |
|
RU2143761C1 |

