Предлагаемое изобретение относится к электротехнике и может быть использовано преимущественно для диагностики приводных электромагнитов (ЭМ) клапанов и коммутационных аппаратов без перемещения их подвижных частей.
Известны различные способы определения перемещения или положения исполнительного элемента ЭМ по характеру изменения тока обмотки.
Например, в [1] описаны способ и устройство определения изменения положения исполнительного элемента ЭМ по результатам сравнения сигнала, пропорционального току, протекающему через обмотку ЭМ, с опорным напряжением. Причем опорное напряжение формируют от сигнала, пропорционального току, обработанного фильтром нижних частот (ФНЧ). Сравнение выполняют с использованием компараторов, на один из входов которого подается сигнал, пропорциональный току, протекающему через обмотку ЭМ, а на другой - опорное напряжение. Результат сравнения позволяет определить только, имело ли место срабатывание ЭМ.
В описании патента [2] предложены способ и реализующее его устройство, которые позволяют определить положение якоря электромагнита путем наложения сигнала распознавания фиксированной части на управляющий сигнал драйвера обмотки. Объединенный сигнал подается на обмотку электромагнита, и переменная составляющая тока, протекающего через обмотку, меняется в зависимости от изменения индуктивности обмотки электромагнита, которая в свою очередь, зависит от положения якоря. Датчик тока формирует выходной сигнал, соответствующий уровню тока, протекающего через обмотку электромагнита, а с помощью полосового фильтра выделяют переменную компоненту этого выходного сигнала, которая вызвана действием сигнала распознавания. Соответствующий сигнал определения положения якоря формируется на выходе фильтра. Предложенное техническое решение требует использования значительных аппаратных средств, таких как генератор фиксированной частоты, ФНЧ и полосовой фильтр, демодулятор. Кроме того, его применение возможно только совместно с системами, поддерживающими широтно-импульсное регулирование тока ЭМ.
Предложенная в [3] система позволяет определить положение управляющего элемента электрически управляемого привода. Привод включается управляемым ключом в момент, когда ток через обмотку ЭМ имеет величину меньшую, чем нижнее пороговое значение, и выключается в момент, когда током достигнуто верхнее пороговое значение. Длительность включенного и выключенного состояния задаются как функции нижнего и верхнего пороговых значений, а характер переключения зависит от положения управляющего элемента. Положение управляющего элемента определяется из соотношения продолжительности включенного и выключенного состояний и суммы этих временных интервалов. Оно формируется как результат сравнения длительностей выключенного и включенного состояний, а также упомянутой суммы с соответствующими сохраненными справочными данными. Данное техническое решение может быть использовано только в системах с релейным (гистерезисным) регулированием тока в обмотке ЭМ. При этом длительность включенного состояния будет зависеть не только от положения управляющего элемента, но и от изменения напряжения питания. Кроме того, реализация этого способа требует значительного объема ресурсов управляющей системы для хранения массивов значений справочных данных, используемых при выполнении сравнения указанных переменных.
Описанное в [4] техническое решение для определения состояния электромагнита позволяет различать только два состояния электромагнита - включен или выключен. А реализующее его устройство, кроме микроконтроллера, требует использования большого количества дополнительных дискретных элементов.
Наиболее близким к предлагаемому способу является техническое решение «Способ определения положения якоря электромагнита и устройство для его осуществления» [5] (способ-прототип). Этот способ позволяет контролировать рабочий зазор ЭМ, но требует для этого его срабатывания, что ограничивает его применение, например, в системах, находящихся под давлением.
Прототипом предполагаемого устройства является устройство для определения положения якоря электромагнита, описанное в патенте [6]. Его схема ближе всего по элементному составу к предлагаемому техническому решению.
Задачей предполагаемого изобретения является расширение функциональных возможностей путем определения положения якоря электромагнита без совершения перемещения его подвижных частей.
Решение поставленной задачи достигается тем, что напряжение измеряют на выходе источника питания электромагнита, подключают источник питания к обмотке, при достижении заданного момента времени измеряют значение тока в обмотке электромагнита и отключают от обмотки источник питания, а по измеренным величинам тока в обмотке и напряжения источника питания, определяют положение якоря по отношению к стопу (начальный зазор) без срабатывания электромагнита. Причем, заданный момент времени устанавливают максимально допустимым при условии, что при его достижении срабатывание электромагнита не происходит во всех возможных условиях его эксплуатации.
Для обеспечения численного решения поставленной задачи до начала эксплуатации электромагнита при лабораторных или заводских испытаниях формируют таблицу, связывающую значения начального зазора электромагнита со значениями напряжения источника питания и измеренного в заданный момент времени тока в обмотке электромагнита. Эту таблицу запоминают и используют для определения начального зазора до срабатывания при эксплуатации электромагнита.
Полученное значение начального зазора электромагнита можно передавать внешним устройствам для накапливания и анализа данных проведенной диагностики ЭМ.
Полученную табличную зависимость начального зазора от величины измеренного в заданный момент времени тока в обмотке ЭМ, для конкретной величины напряжения источника питания аппроксимируют полиномом третьей степени:

где Z - величина начального зазора до срабатывания электромагнита;
Itз - величина измеренного тока в обмотке ЭМ в заданный момент времени tз;
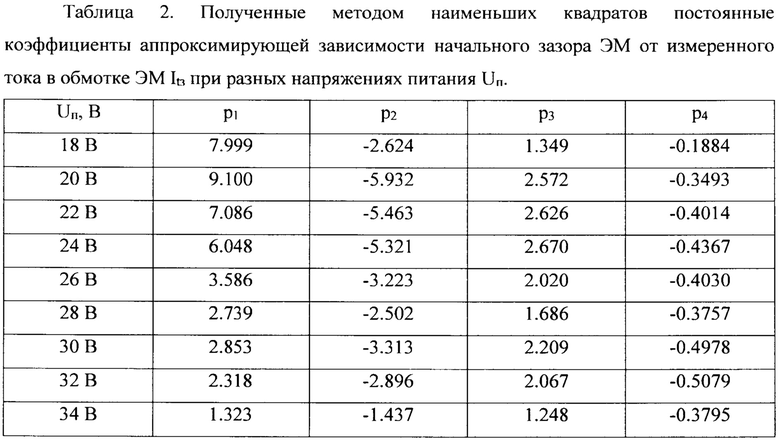
p1, р2, р3, р4 - постоянные коэффициенты для каждого заданного в таблице конкретного значения напряжения источника питания, определяемые, например методом наименьших квадратов, по табличным данным.
Из этих запомненных коэффициентов формируют другую таблицу, в которой каждый набор постоянных коэффициентов соответствует каждому заданному конкретному значению напряжения источника питания, эту таблицу значений постоянных коэффициентов запоминают и используют для определения начального зазора при эксплуатации электромагнита.
При эксплуатации электромагнита по измеренному значению напряжения на выходе источника питания определяют, например, методом линейной интерполяции табличных значений постоянных коэффициентов, набор их значений, соответствующий измеренному значению напряжения питания. С использованием полученного набора постоянных коэффициентов и измеренной величины тока в обмотке электромагнита в заданный момент времени определяют начальный зазор электромагнита с использованием приведенного полинома третьей степени (1).
Определение значения начального зазора электромагнита можно осуществлять с использованием внешних устройств. Тогда значения измеренных величин напряжения питания и тока в обмотке электромагнита передают внешним устройствам. А определение начального зазора электромагнита с использованием табличных значений постоянных коэффициентов p1, р2, р3, р4 и указанного полинома третьей степени выполняется внешним устройством.
Для решения поставленной задачи в устройство дополнительно введен измеритель напряжения, вход которого соединен с выходом источника питания, а выход - с выводом 4 микроконтроллера, кроме того, в составе устройства дополнительно задействованы соединенные с внутренней двунаправленной шиной следующие внутренние периферийные модули микроконтроллера: конфигурируемые логические ячейки CLC1 и CLC2, которые используются в качестве логического элемента «ИЛИ», таймер Timer1, а также разряды «RC6» и «RC0» регистра порта ввода/вывода PORTC, причем разряд «RC0» соединен с выходом COGA блока формирования выходных сигналов COG1 и с выводом 11 микроконтроллера, настроенным как цифровой выход порта ввода/вывода PORTC, а счетный вход таймера Timer1 и вход конфигурируемой логической ячейки CLC1 соединены с выходом внутреннего тактового генератора, выход конфигурируемой логической ячейки CLC1 соединен с входом Rising Event Input Source блока формирования выходных сигналов COG1, вход конфигурируемой логической ячейки CLC2 соединен с выходом таймера Timer1, выход конфигурируемой логической ячейки CLC2 соединен с входом Shutdown source блока формирования выходных сигналов COG1, входы «AN2», «AN11» аналого-цифрового преобразователя ADC соединены соответственно с выводами 4 и 25 микроконтроллера, настроенными как аналоговые входы порта ввода/вывода PORTA, PORTB, соответственно, вывод 25 микроконтроллера соединен с выходом фильтра нижних частот, выход таймера Timer1 соединен с входом Auto-conversion Trigger аналого-цифрового преобразователя ADC, разряд порта «RC6» регистра порта ввода/вывода PORTC соединен с выводом 17 микроконтроллера, настроенным как цифровой выход порта ввода/вывода PORTC.
Сущность предлагаемого технического решения поясняется чертежами.
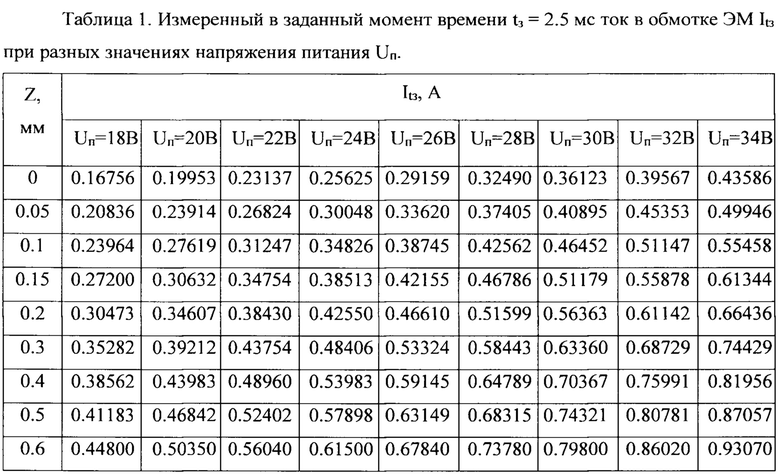
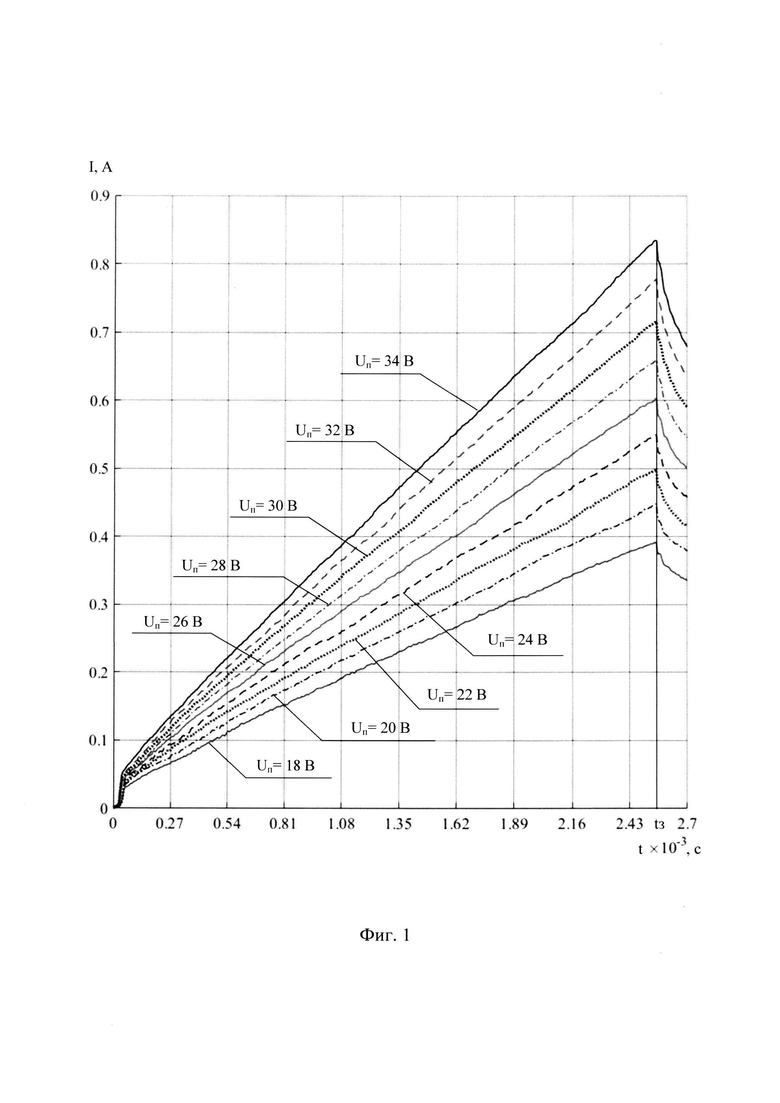
Фиг. 1. Экспериментальные переходные процессы изменения тока I в обмотке ЭМ при разных значениях напряжения питания Uп и отключении от обмотки источника питания в заданный момент времени tз=2.5 мс.
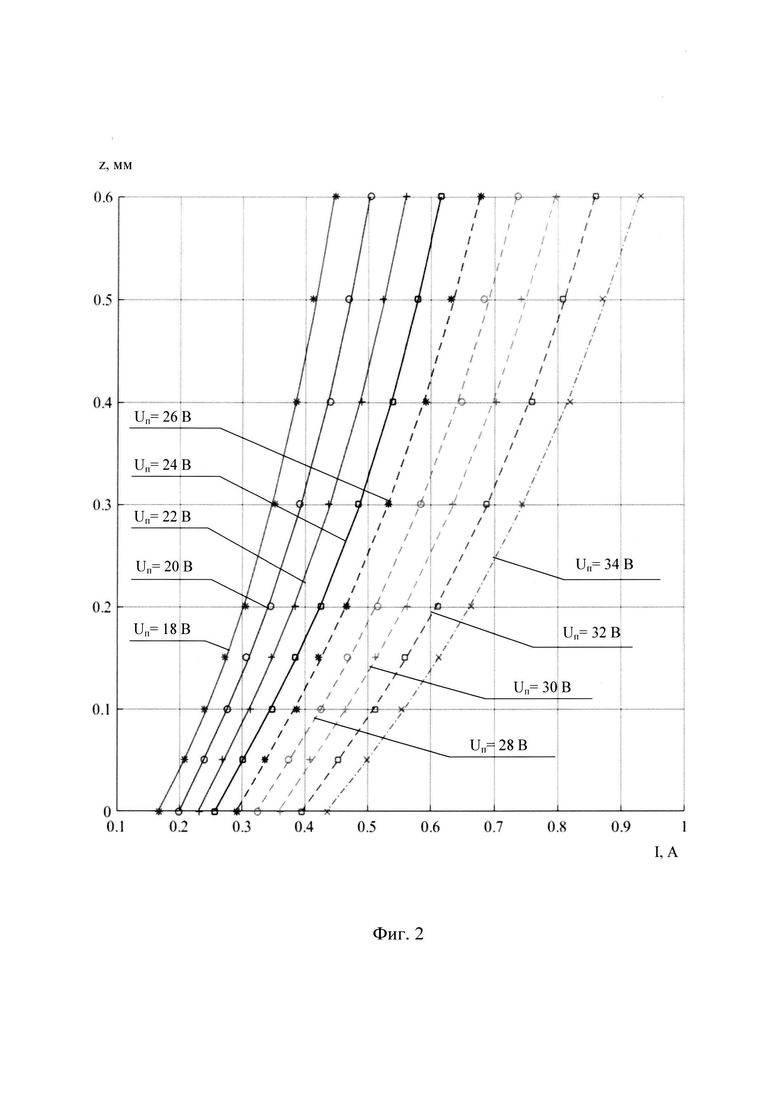
Фиг. 2. Семейства экспериментальных и аппроксимирующих зависимостей начального зазора Z от величины тока Itз для разных значений напряжения питания Uп.
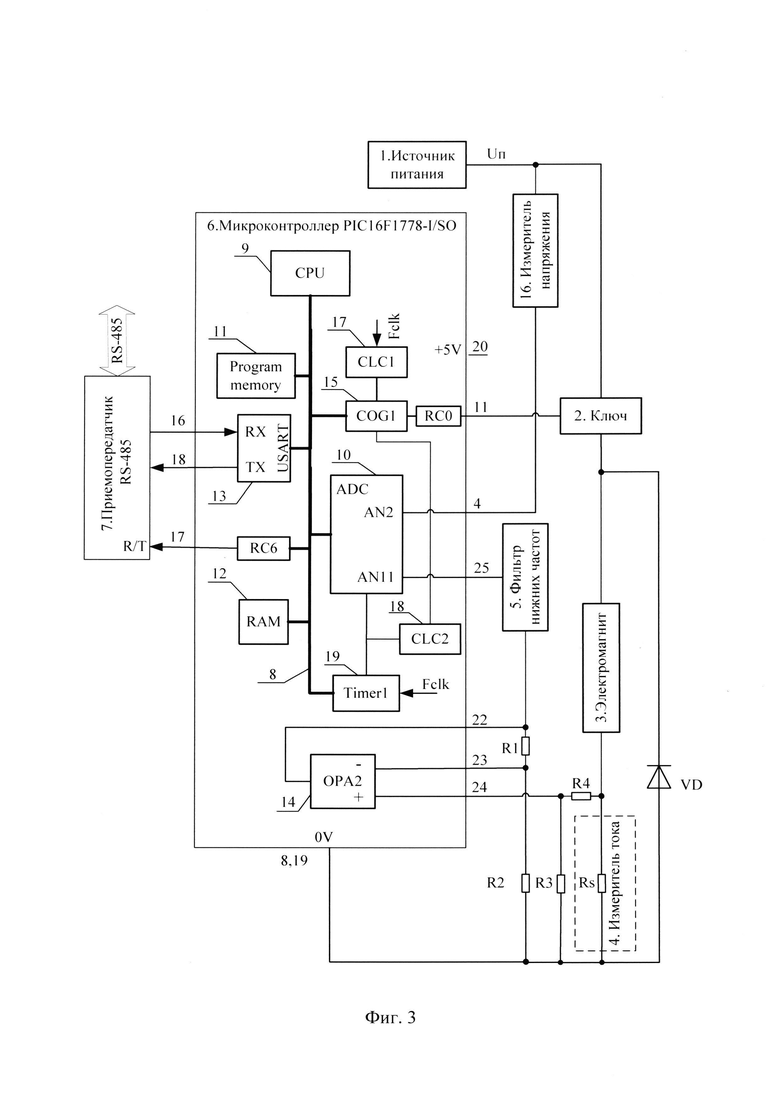
Фиг. 3. Функциональная схема устройства для определения положения якоря электромагнита.
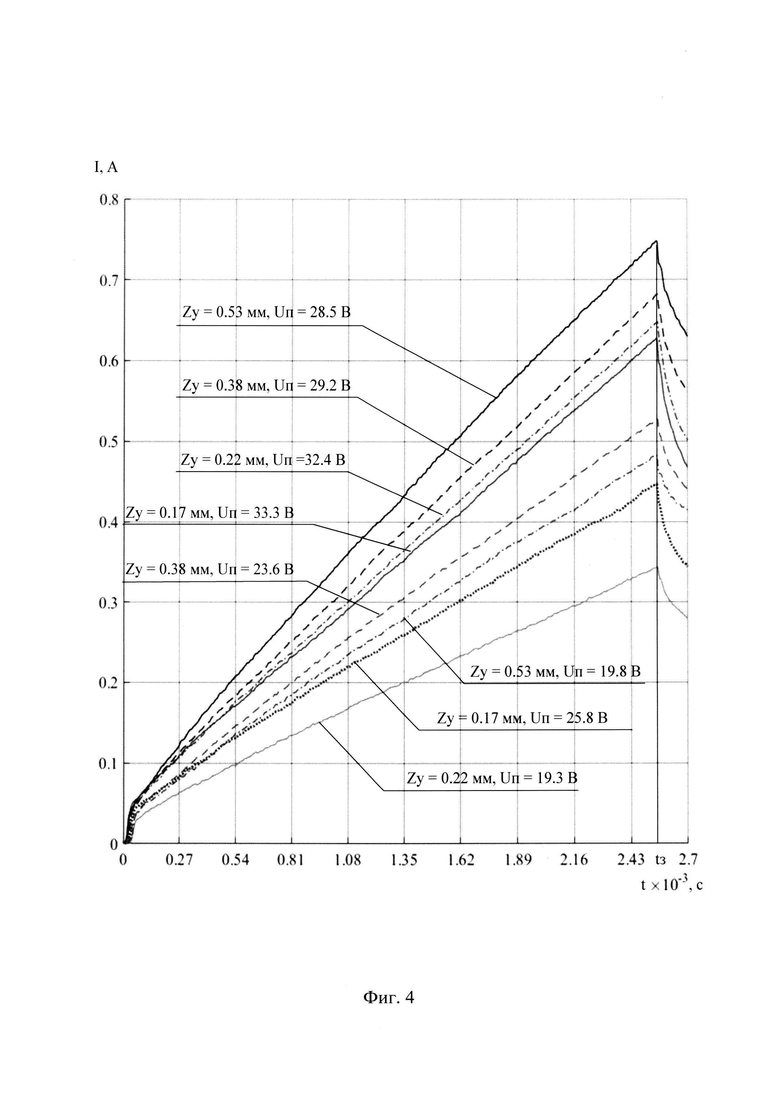
Фиг. 4. Экспериментальные переходные процессы изменения тока I в обмотке ЭМ при отключении от обмотки источника питания в заданный момент времени tз=2.5 мс, (при разных установленных величинах начального зазора Z и разных значениях напряжения питания Uп), полученные при экспериментальной отработке предполагаемого технического решения.
Физической основой предлагаемого способа послужили результаты лабораторных испытаний ЭМ втяжного типа с дисковым якорем. В процессе этих испытаний исследовались переходные процессы изменения тока в обмотке ЭМ при подключении к ней постоянного напряжения питания для разных значений начального зазора между якорем и стопом ЭМ при его срабатывании. Анализируя полученные переходные процессы изменения тока в обмотке ЭМ при срабатывании, можно заметить, что скорость нарастания тока для каждого значения начального зазора между якорем и стопом ЭМ при одинаковой величине напряжения питания будет разной. При этом скорость нарастания тока, как известно, определяется величиной индуктивности магнитной системы ЭМ, а величина индуктивности зависит от величины зазора между якорем и стопом ЭМ. Таким образом, между скоростью нарастания тока в обмотке ЭМ при подаче напряжения на обмотку и величиной начального зазора между якорем и стопом ЭМ при одинаковом напряжении питания существует однозначная зависимость.
Выберем заданный момент времени, тогда измеренное в этот момент времени значение тока в обмотке ЭМ Itз, будет связано со скоростью нарастания тока. Если выбрать заданный момент времени до момента, при котором в процессе эксплуатации ЭМ возможно его срабатывание, то величина тока в обмотке ЭМ Itз при одинаковом напряжении питания будет однозначно связана с величиной начального зазора Z между якорем и стопом ЭМ. Отметим еще раз, что заданный момент времени выбирается так, чтобы при его достижении срабатывание ЭМ не произошло, но при этом измеренное в заданный момент времени значение тока Itз было хорошо различимо для разных значений начального зазора Z. Это обеспечит достаточную разрешающую способность способа.
На скорость нарастания тока в обмотке ЭМ, кроме величины начального зазора, существенное влияние оказывает значение напряжения питания. Этот факт необходимо учитывать при определении величины начального зазора.
Заданный момент времени в данном случаем выбран равным tз=2.5 мс по переходному процессу изменения тока в обмотке ЭМ, полученному для максимального исследуемого значения напряжения питания (Uп=34B) и минимального установленного начального зазора (Z=0.05mm).
На фиг. 1 приведены переходные процессы изменения тока в обмотке ЭМ при постоянной величине начального зазора Z=0.5 мм и разных значениях напряжения питания. Здесь источник питания отключают от обмотки при достижении заданного момента времени tз=2.5 мс. Это позволяет количественно оценить влияние напряжения питания на ток в обмотке электромагнита при постоянном значении начального зазора.
Данные о лабораторных испытаниях исследуемого электромагнита, отражающие значения измеренного в заданный момент времени tз=2.5 мс тока в обмотке ЭМ Itз при разных значениях напряжения питания Uп, представлены в таблице 1. Эту таблицу можно внести в паспортные данные исследуемого электромагнита и использовать для определения начального зазора между якорем и стопом до срабатывания при эксплуатации электромагнита.
Полученные табличные экспериментальные данные, связывающие измеренный в заданный момент времени ток в обмотке ЭМ Itз с величиной начального зазора Z для каждого заданного при испытаниях значениях напряжения питания Uп, могут быть аппроксимированы, например методом наименьших квадратов, полиномом третьей степени (1). Таким образом, для каждого заданного при испытаниях значения напряжения питания Uп может быть получен набор значений постоянных коэффициентов p1, р2, р3, р4, которые однозначно определяют аналитическую аппроксимирующую зависимость начального зазора Z от измеренного в заданный момент времени значения тока в обмотке ЭМ Itз при конкретном значении напряжения питания Uп. Эти наборы значений постоянных коэффициентов могут быть занесены в другую таблицу 2, которую также как таблицу 1 можно внести в паспортные данные исследуемого электромагнита.
Набор значений постоянных коэффициентов p1, р2, р3, р4, соответствующий измеренному значению напряжения питания Uп, позволяет определять начальный зазор ЭМ Z с использованием приведенного полинома третьей степени (1).
При эксплуатации ЭМ по измеренному значению напряжения на выходе источника питания можно определять, например, методом линейной интерполяции табличных значений постоянных коэффициентов из таблицы 2, набор их значений, соответствующий измеренному значению напряжения питания. С использованием полученного набора постоянных коэффициентов p1, р2, р3, р4 и измеренной в заданный момент времени величины тока в обмотке ЭМ Itз можно определять начальный зазор ЭМ с помощью полинома третьей степени (1).
Полученное значение начального зазора может быть передано внешним устройствам.
Процедура определения значения начального зазора Z с использованием полученного набора постоянных коэффициентов p1, р2, р3, р4 и измеренного в заданный момент времени тока в обмотке ЭМ Itз может быть реализована на вычислительных ресурсах устройства, осуществляющего управление ЭМ и регистрирующего измерения напряжения питания Uп и величины тока в обмотке ЭМ Itз. Другой вариант: измеренные значения величин напряжения источника питания Uп и тока в обмотке ЭМ Itз передаются внешнему устройству, а определение начального зазора ЭМ Z с использованием табличных значений постоянных коэффициентов p1, р2, р3, р4 и указанного полинома третьей степени (1) осуществляются с использованием внешних устройств.
На фиг. 2 представлены семейства экспериментальных характеристик и аппроксимирующих зависимостей начального зазора Z от измеренного в заданный момент времени значения тока в обмотке ЭМ Itз для разных значений напряжения питания Uп. На графике нанесены экспериментальные данные, занесенные в таблицу 1, в виде дискретных отсчетов, каждый из которых соответствует установленным при проведении испытания величине начального зазора Z, значению напряжения питания Uп и измеренному в заданный момент времени значению тока в обмотке ЭМ Itз. Каждая из последовательностей дискретных отсчетов, соответствующая какому-то одному из значений напряжения питания, была методом наименьших квадратов аппроксимирована полиномом третьей степени вида (1), что позволило для каждого случая получить соответствующие значения постоянных коэффициентов p1, р2, р3, р4, которые помещены в таблицу 2. На графиках фиг. 2 представлены соответствующие каждому набору постоянных коэффициентов (или значению напряжения питания) аппроксимирующие зависимости Z(Itз) в виде непрерывных кривых.
Функциональная схема устройства для определения положения якоря электромагнита показана на фиг. 3.
Устройство содержит (см. фиг. 3) последовательно соединенные источник питания (1) и ключ (2) выход которого соединен с входом электромагнита (3), измеритель тока (4), выполненный на измерительном регистре Rs, фильтр нижних частот (5), микроконтроллер PIC16F1778-I/SO (6) [7], приемопередатчик RS-485 (7), связанный двунаправленной линией с внешними устройствами, диод VD, соединенный последовательно первый и второй резисторы R1 и R2, соединенные последовательно третий и четвертый резисторы R3 и R4. Причем, первый вывод первого резистора R1 соединен с входом фильтра нижних частот (5) и выводом 22 микроконтроллера (6), второй вывод первого резистора R1 соединен с выводом 23 микроконтроллера (6), первые выводы измерительного и четвертого резисторов Rs и R4 соединены с выходом электромагнита (3), а вторые выводы второго R2, третьего и измерительного резисторов R3 и Rs соединены с отрицательным выводом источника питания, выводами 8 и 19 микроконтроллера (6) и анодом диода VD, катод которого соединен с выходом ключа (2) и входом электромагнита (3). Второй вывод четвертого резистора R4 соединен с выводом 24 микроконтроллера (6). Управляющий вход ключа (2) соединен с выводом 11 микроконтроллера (6). Вывод 16 микроконтроллера (6) соединен с выходом приемопередатчика RS-485 (7), два входа которого соединены соответственно с выводами 17 и 18 микроконтроллера (6). Кроме того, в составе устройства задействованы соединенные по умолчанию с внутренней двунаправленной шиной (8) следующие внутренние периферийные модули микроконтроллера (6): модуль центрального процессора CPU (9), аналого-цифровой преобразователь ADC (10), модуль памяти программ Program memory (11), модуль оперативной памяти RAM (12), модуль последовательного интерфейса USART (13), выход ТХ которого соединен с выводом 18 микроконтроллера (6), а вход RX - с выводом 16 микроконтроллера (6). Задействован также внутренний периферийный модуль - операционный усилитель ОРА2 (14). Неинвертирующий вход операционного усилителя ОРА2 (14) соединен с выводом 24, а инвертирующий вход с выводом 23 микроконтроллера (6), настроенными как аналоговые входы порта ввода/вывода PORTB. Выход операционного усилителя ОРА2 (14) соединен с выводом 22 микроконтроллера (6), настроенным как аналоговый выход порта ввода/вывода PORTB. Задействован также внутренний периферийный модуль - блок формирования выходных сигналов COG1 (15), соединенный по умолчанию с внутренней двунаправленной шиной (8). В устройство введен измеритель напряжения (16), вход которого соединен с выходом источника питания (1), а выход - с выводом 4 микроконтроллера (6). Кроме того, в составе устройства задействованы соединенные с внутренней двунаправленной шиной (8) следующие внутренние периферийные модули микроконтроллера (6): конфигурируемые логические ячейки CLC1(17) и CLC2 (18), которые используются в качестве логического элемента «ИЛИ», таймер Timer1 (19), а также разряды «RC6» и «RC0» регистра порта ввода/вывода PORTC. Разряд «RC0» соединен с выходом COGA блока формирования выходных сигналов COG1 (15) и с выводом 11 микроконтроллера (6), настроенным как цифровой выход порта ввода/вывода PORTC. Счетный вход таймера Timer1 (19) и вход конфигурируемой логической ячейки CLC1 (17) соединены с выходом внутреннего тактового генератора, формирующего сигнала Fclk. Выход конфигурируемой логической ячейки CLC1 (17) соединен с входом блока формирования выходных сигналов COG1 (15), входы «AN2», «AN11» аналого-цифрового преобразователя ADC (10) соединены с выводами 4 и 25 микроконтроллера (6), настроенными как аналоговые входы порта ввода/вывода PORTA, PORTB, соответственно. Вывод 25 микроконтроллера (6) соединен с выходом фильтра нижних частот (5). Выход таймера Timer1 (19) соединен с входом Auto-conversion Trigger аналого-цифрового преобразователя ADC (10), разряд порта «RC6» регистра порта ввода/вывода PORTC соединен с выводом 17 микроконтроллера (6), настроенным как цифровой выход порта ввода/вывода PORTC.
Предлагаемое устройство может использоваться в распределенной системе управления как оконечное. Его работа происходит по командам системы верхнего уровня, передаваемым по последовательному интерфейсу RS-485. Также указанный интерфейс используется для настройки параметров управления и передачи текущего значения зазора ЭМ (3) или текущих значений рабочих параметров (напряжения источника питания Uп и тока в обмотке электромагнита Itз) внешнему устройству системы верхнего уровня. Приемопередатчик RS-485 (7) преобразует логические сигналы микроконтроллера в дифференциальный сигнал полудуплексной интерфейсной многоточечной линии в соответствии с требованиями стандарта [8]. Приемопередатчик RS-485 (7) может быть выполнен на микросхеме SN65HVD1785 [9]. Эти микросхемы предназначены для использования в качестве приемопередатчика по стандарту RS-485 для организации полудуплексного канала связи по соответствующим стандартам. Приемопередатчик RS-485 (7) соединен с модулем универсального синхронного/асинхронного приемопередатчика USART (Universal Synchronous/Asynchronous Receiver/Transmitter) (13), являющегося внутренним периферийным модулем микроконтроллера (6) [7]. Переключение с приема на передачу осуществляется программно установкой или снятием бита «RC6», через вывод 17 микроконтроллера (6).
В предлагаемом устройстве для управления и контроля состояния ЭМ, в качестве основного счетно-решающего и управляющего блока используется модуль центрального процессора CPU (9) (CPU - central processing unit) микроконтроллера PIC16F1778-I/SO (6) [7].
Основная часть схемы устройства для управления ЭМ (3), обеспечивающая обработку сигналов измерения тока в обмотке электромагнита, напряжения питания, контроля времени и формирования сигналов управления выполнена с использованием ресурсов микроконтроллера (6) и его внутренних периферийных модулей.
При этом, внутренние периферийные модули микроконтроллера (МК) соединены, задействованы, и сконфигурированы для выполнения поставленной задачи.
Предложенное техническое решение позволяет значительно снизить нагрузку на вычислительные ресурсы МК и уменьшить габариты устройства за счет использования для построения схемы устройства интегрированных периферийных модулей. Для построения контура управления током с использованием МК используются его внутренние периферийные модули Периферии Независимой от Ядра (ПНЯ) (Core Independent Peripheral - CIP). В этом случае функционирование контура управления не зависит (или почти не зависит) от тактовой частоты МК и его состояния. Подобная периферия конфигурируется программой МК, но дальнейшее ее функционирование может быть совершенно независимым. В концепции ПНЯ периферийные модули могут соединяться внутри МК и не иметь выходов наружу, что дает возможность синтеза функциональных блоков за счет совместного использования нескольких периферийных модулей для решения конкретных задач. Это позволяет минимизировать количество используемых выводов корпуса МК при построении схемы устройства и размеры изделия в целом.
Источник питания (1) обеспечивает питание силовых цепей управления ЭМ (3) и формирование напряжения 5 В, подаваемого (см. функциональную схему на фиг. 3) на вывод 20 МК (6) для его питания. Ключ (2) обеспечивает коммутацию обмотки ЭМ (3) по сигналам, поступающим от модуля формирования выходных сигналов COG1 (15) МК (6). Для управления ключом (2) используется сигнал с выхода COGA модуля формирования выходных сигналов COG1 (15). Модуль COG1 (15) сконфигурирован для работы в режиме Forward Full-Bridge mode. Сигнал Fclk с выхода внутреннего тактового генератора поступает на вход Rising Event Input модуля COG1 (15), через элемент «ИЛИ», выполненный на конфигурируемой логической ячейке CLC1 (17), обеспечивая включение ключа (2) синхронно с началом счета Timer1 (19) по приходу команды по последовательному интерфейсу. Для повышения высокой разрешающей способности в качестве Fclk используется сигнал кварцевого генератора микроконтроллера - Fosc. При достижении заданного момента времени сигнал, формируемый на выходе таймера Timer1 (19), поступает на вход ASE1 (Auto-shutdown control - SOURCE 1) модуля формирования выходных сигналов COG1 (15), через элемент «ИЛИ», выполненный на конфигурируемой логической ячейке CLC2 (18). По этому сигналу происходит остановка работы модуля COG1 (15) и отключение ключа (2) через вывод 11 МК (6). Для обеспечения однократного срабатывания ключа (2) выбирается режим работы модуля COG1 (15) без авто рестарта, то есть с программным сбросом.
Измеритель тока (4) выполнен на измерительном резисторе Rs, сигнал с которого усиливается операционным усилителем ОРА2 (14) и через фильтр нижних частот (5) поступает на вход аналого-цифрового преобразователя ADC (10) для измерения величины тока в заданный момент времени.
Демпфирующий диод VD обеспечивает защиту верхнего ключа (2) от воздействия ЭДС самоиндукции, возникающей в обмотке ЭМ (3) при его размыкании. В качестве ключа (2) в устройстве может быть использован ключ верхнего уровня AUIPS7221R [10], содержащий в своем составе драйвер MOSFET, управляемый логическим сигналом.
Работает устройство следующим образом.
При подаче питания программа инициализации МК (6) выполняет начальную конфигурацию его периферии, в процессе которой устанавливается связи, показанные на функциональной схеме, приведенной на фиг. 3, и настраиваются выбранные режимы работы периферийных модулей. В таймер Timer1 (19) загружается число, значение которого соответствует заданному моменту времени tз, после чего устройство переходит в режим ожидания. При получении по последовательному интерфейсу команды на определение начального зазора ЭМ, под управлением программы выполняется запуск счета Timer1 (19), устанавливается бит разрешения работы модуля формирования выходных сигналов COG1 (EN) и сбрасывается бит его состояния SHUTDOWN (ASE). Далее модули периферии работают независимо от выполнения программ. После получения разрешения модулем формирования выходных сигналов COG1 (15) при появлении положительного фронта на входе RES (Rising event source), на его выходе COGA (выводе 11 МК (6)) появляется сигнал логическая «1», который приводит к замыканию ключа (2). Следующей командой (после сброса бита ASE) установкой бита TMRION запускается счет Timer1 (19). После чего производится измерение напряжения питания, поступающего через измеритель напряжения (16), на аналоговый вход AN2 АЦП ADC (10) (вывод 4 МК (6)). Напряжение, пропорциональное току ЭМ (3) с измерителя тока (4), усиливается неинвертирующим усилителем, выполненным на операционном усилителе ОРА2 (14), входящим в состав внутренних периферийных модулей микроконтроллера (6), и резисторах R1…R4, после чего сглаживается фильтром нижних частот (5). При достижении заданного момента времени происходит измерение тока ЭМ, останавливается счет таймера Timer1 (19), и отключается модуль формирования выходных сигналов COG1 (15), что приводит к размыканию ключа (2).
Полученные значения напряжения питания и тока в обмотке электромагнита из ADC (10) сохраняются, и по запросу устройства верхнего уровня передаются ему.
Для проверки работоспособности предполагаемого технического решения и оценки точности определения положения якоря ЭМ при его использовании были проведены лабораторные испытания опытного образца устройства. Проверялась работа устройства определения положения якоря ЭМ при разных значениях напряжения питания и начального зазора ЭМ из рабочего диапазона, произвольно устанавливаемого с помощью микрометрического винта и набора щупов №2 ГОСТ 882-75, кл. 2. Результаты выполненных измерений регистрировались с помощью осциллографа R&S®RTE1034 [11] и далее обрабатывались с использованием персонального компьютера.
Экспериментальные переходные процессы изменения тока I в обмотке ЭМ при отключении напряжения питания в заданный момент времени tз=2.5 мс (при разных установленных величинах начального зазора Z и разных конкретных измеренных значениях напряжения питания Uп), полученные при эксплуатационной отработке предлагаемого технического решения приведены на графиках фиг. 4.
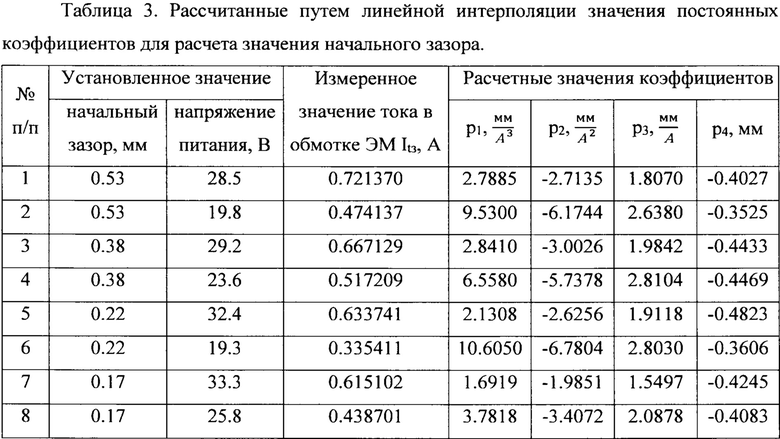
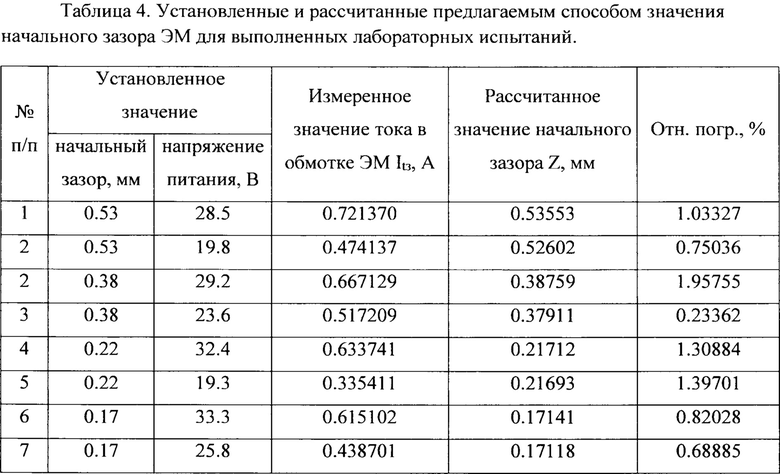
Соответствующие каждому приведенному на фиг. 4 графику переходного процесса изменения тока в обмотке ЭМ значения напряжения питания Uп и величины измеренного в заданный момент времени тока в обмотке ЭМ Itз были использованы для определения расчетных значений постоянных коэффициентов p1, р2, р3, р4, аппроксимирующей зависимости вида (1) и, наконец, расчета начального зазора ЭМ. Данные для всех выполненных восьми испытаний, представленных на фиг. 4 в виде графиков, сведены в таблицу 3. Каждому проведенному испытанию в таблице 3 соответствуют свои значения начального зазора Z и напряжения питания Uп, установленные перед его проведением, и измеренное в заданный момент времени tз=2.5 мс при вторичной обработке на персональном компьютере значение тока в обмотке ЭМ Itз для зарегистрированного переходного процесса изменения тока I в обмотке ЭМ. Для каждого установленного значения напряжения питания Uп методом линейной интерполяции данных, приведенных в таблице 2, был получен соответствующий набор постоянных коэффициентов p1, р2, р3, р4 (см. таблицу 3), с использованием которых по соотношению (1) рассчитано значение начального зазора Z. Полученные данные сведены в таблицу 4, по которой выполнено сравнение расчетного и установленного перед испытанием значений начального зазора ЭМ предлагаемым способом, относительная погрешность определения начального зазора для выполненных испытаний составила менее 2%.
Таким образом, приведенная экспериментальная отработка предлагаемого технического решения подтверждает его работоспособность и эффективность. Задача определения положения начального зазора ЭМ решается без осуществления срабатывания электромагнита с достаточной для практических целей точностью. Если ЭМ используется в качестве исполнительного привода электроклапана (ЭК), предназначенного для открытия и закрытия рабочей магистрали, по которой жидкое или газообразное тело подается к потребителю, то отсутствие срабатывания при определении начального зазора позволяет многократно контролировать величину начального зазора, не внося возмущения в работу системы, в которой используется ЭК, и не допускать непроизводительный расход рабочего тела.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. METHOD AND CIRCUIT FOR DETECTING THE ARMATURE POSITION OF AN ELECTROMAGNET. US 6,949,923 B2. Date of Patent: Sep. 27, 2005.
2. METHOD AND APPARATUS FOR SENSING ARMATURE POSITION IN RELUCTANCE ELECTROMAGNETIC ACTUATORS. CANADIAN PATENT. CA 2247809 C. Date 2001/10/23.
3. SYSTEM FOR DETERMINING POSITIONS OF A CONTROL ELEMENT OF AN ELECTRICALLY DRIVEN ACTUATOR. US 2004/0016461 A1. Pub. Date: Jan. 29,2004.
4. SOLENOID DRIVER AND METHOD FOR DETERMINING SOLENOID OPERATIONAL STATUS. EP 0882303 B1. 21.04.2004 Bulletin 2004/17.
5. СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ. RU 2717952 С1 Опубликовано: 27.03.2020 Бюл. №9.
6. СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ. RU 2746039 С1 Опубликовано: 06.04.2021 Бюл.№10.
7. PIC16(L)F1777/8/9 28/40/44-Pin, 8-Bit Flash Microcontroller. [Электронный ресурс] //URL:https://ww1.microchip.com/downloads/en/DeviceDoc/PIC16(L)F1777_8_9_Farnily_Data _Sheet_40001819D.pdf (дата обращения 20.07.2022).
8. ANSI TIA/EIA RS-485-A: (Recommended standard 485 Edition A) 1998. Electrical Characteristics of Generators and Receivers for Balanced Digital Multipoint Systems.
9. [Электронный ресурс] // URL: https://www.ti.com/lit/ds/symlink/sn65hvd1785.pdf (дата обращения 21.07.2022).
10. [Электронный ресурс] // URL: https//www/Infineon.com/dgdl/auisp7221t.pdf (дата обращения 21.07.2022)
11. Осциллографы цифровые R&S RTE Руководство по эксплуатации. [Электронный ресурс] // URL: http//rodeschwarz.shop/catalog/ostcillografy/rode_schwarz_rte1034/ (дата обращения 18.06.2022).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2793305C1 |
| СПОСОБ МОНИТОРИНГА ДАВЛЕНИЯ НА ВХОДЕ ГАЗОВОГО ЭЛЕКТРОМАГНИТНОГО КЛАПАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2802294C1 |
| СПОСОБ МОНИТОРИНГА ДАВЛЕНИЯ НА ВХОДЕ ГАЗОВОГО ЭЛЕКТРОМАГНИТНОГО КЛАПАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2832565C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2783869C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2746039C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2795208C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2747003C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2717952C1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2746964C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2756292C1 |
Изобретение относится к электротехнике и может быть использовано при управлении приводными электромагнитами (ЭМ) клапанов и коммутационных аппаратов. Техническим результатом изобретения является расширение функциональных возможностей путем определения положения якоря электромагнита без совершения перемещения его подвижных частей. Для этого напряжение измеряют на выходе источника питания электромагнита, подключают источник питания к обмотке, при достижении заданного момента времени измеряют значение тока в обмотке электромагнита и отключают от обмотки источник питания, а по измеренным величинам тока в обмотке и напряжения источника питания определяют положение якоря по отношению к стопу (начальный зазор) без срабатывания электромагнита. Причем заданный момент времени устанавливают максимально допустимым при условии, что при его достижении срабатывание электромагнита не происходит во всех возможных условиях его эксплуатации. Предложена также функциональная схема устройства для определения положения якоря ЭМ (см. фиг. 3), ориентированная на использование в качестве основного счетно-решающего элемента микроконтроллера PIC16F1778-I/SO, обеспечивающего реализацию операций предлагаемого способа. Большая часть функциональной схемы устройства построена с использованием внутренних периферийных модулей микроконтроллера. Если ЭМ используется в качестве исполнительного привода электроклапана (ЭК), предназначенного для открытия и закрытия рабочей магистрали, по которой жидкое или газообразное рабочее тело подается к потребителю, то отсутствие срабатывания при определении начального зазора позволяет многократно контролировать величину начального зазора, не внося возмущения в работу системы, в которой используется ЭК, и не допускать непроизводительный расход рабочего тела. 2 н. и 5 з.п. ф-лы, 4 ил., 4 табл.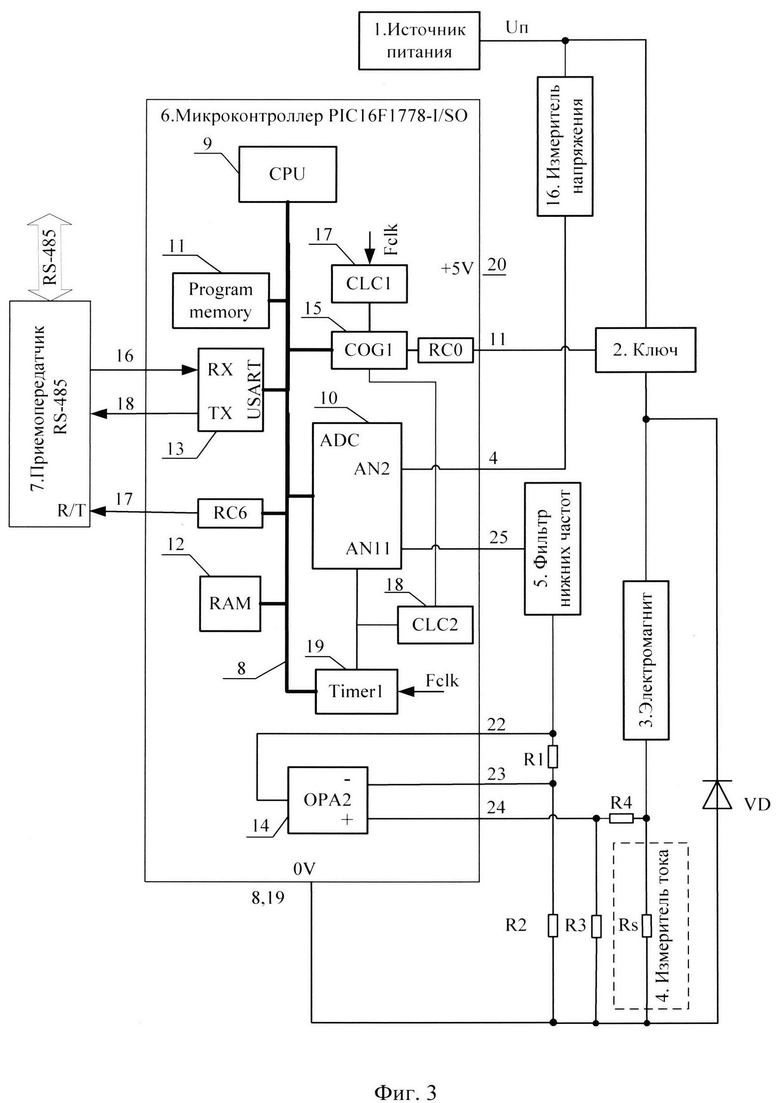
1. Способ определения положения якоря электромагнита, включающий измерение текущего значения тока через его обмотку и напряжения на этапе включения электромагнита, отличающийся тем, что напряжение измеряют на выходе источника питания электромагнита, подключают источник питания к обмотке, при достижении заданного момента времени измеряют значение тока в обмотке электромагнита и отключают от обмотки источник питания, а по измеренным величинам тока в обмотке и напряжения источника питания определяют положение якоря по отношению к стопу, то есть начальный зазор, без срабатывания электромагнита, причем заданный момент времени устанавливают максимально допустимым при условии, что при его достижении срабатывание электромагнита не происходит во всех возможных условиях его эксплуатации.
2. Способ определения положения якоря электромагнита по п. 1, отличающийся тем, что до начала эксплуатации электромагнита при лабораторных или заводских испытаниях формируют таблицу, связывающую значения начального зазора электромагнита со значениями напряжения источника питания и измеренного в заданный момент времени тока в обмотке электромагнита, эту таблицу запоминают и используют для определения начального зазора до срабатывания при эксплуатации электромагнита.
3. Способ определения положения якоря электромагнита по п. 1, отличающийся тем, что полученное значение начального зазора электромагнита передают внешним устройствам.
4. Способ определения положения якоря электромагнита по п. 2, отличающийся тем, что полученную табличную зависимость начального зазора от величины измеренного в заданный момент времени тока в обмотке электромагнита для конкретной величины напряжения источника питания аппроксимируют полиномом третьей степени:

где Z - величина начального зазора до срабатывания электромагнита;
Itз - величина измеренного тока в обмотке электромагнита в заданный момент времени tз;
p1, р2, р3, p4 - постоянные коэффициенты для каждого заданного в таблице конкретного значения напряжения источника питания, определяемые, например, методом наименьших квадратов, по табличным данным,
из этих запомненных коэффициентов формируют другую таблицу, в которой каждый набор постоянных коэффициентов соответствует каждому заданному конкретному значению напряжения источника питания, эту таблицу значений постоянных коэффициентов запоминают и используют для определения начального зазора при эксплуатации электромагнита.
5. Способ определения положения якоря электромагнита по п. 4, отличающийся тем, что при эксплуатации электромагнита по измеренному значению напряжения на выходе источника питания определяют, например, методом линейной интерполяции табличных значений постоянных коэффициентов, набор их значений, соответствующий измеренному значению напряжения питания, и с использованием полученного набора постоянных коэффициентов и измеренной величины тока в обмотке электромагнита в заданный момент времени определяют начальный зазор электромагнита с использованием приведенного полинома третьей степени.
6. Способ определения положения якоря электромагнита по п. 5, отличающийся тем, что значения измеренных величин напряжения источника питания и тока в обмотке электромагнита передают внешним устройствам, а определение начального зазора электромагнита с использованием табличных значений постоянных коэффициентов p1, р2, р3, р4 и указанного полинома третьей степени осуществляется с использованием внешних устройств.
7. Устройство для определения положения якоря электромагнита, содержащее последовательно соединенные источник питания и ключ, выход которого соединен с входом электромагнита, измеритель тока, выполненный на измерительном резисторе, фильтр нижних частот, микроконтроллер PIC16F1778-I/SO, приемопередатчик RS-485, связанный двунаправленной линией с внешними устройствами, диод, соединенные последовательно первый и второй резисторы, соединенные последовательно третий и четвертый резисторы, первый вывод первого резистора соединен с входом фильтра нижних частот и выводом (22) микроконтроллера, второй вывод первого резистора соединен с выводом (23) микроконтроллера, первые выводы измерительного и четвертого резисторов соединены с выходом электромагнита, а вторые выводы второго, третьего и измерительного резисторов соединены с отрицательным выводом источника питания, выводами (8) и (19) микроконтроллера и анодом диода, катод которого соединен с выходом ключа и входом электромагнита, второй вывод четвертого резистора соединен с выводом (24) микроконтроллера, управляющий вход ключа соединен с выводом (11) микроконтроллера, вывод (16) микроконтроллера соединен с выходом приемопередатчика RS-485, два входа которого соединены соответственно с выводами (17) и (18) микроконтроллера, кроме того, в составе устройства задействованы соединенные по умолчанию с внутренней двунаправленной шиной следующие внутренние периферийные модули микроконтроллера: модуль центрального процессора CPU, аналого-цифровой преобразователь ADC, модуль памяти программ Program memory, модуль оперативной памяти RAM, модуль последовательного интерфейса USART, выход ТХ которого соединен с выводом (18) микроконтроллера, а вход RX - с выводом (16) микроконтроллера, задействован также внутренний периферийный модуль - операционный усилитель ОРА2, неинвертирующий вход операционного усилителя ОРА2 соединен с выводом (24), а инвертирующий вход с выводом (23) микроконтроллера, настроенными как аналоговые входы порта ввода/вывода PORTB, а выход операционного усилителя ОРА2 соединен с выводом (22) микроконтроллера, настроенным как аналоговый выход порта PORTB, задействован также внутренний периферийный модуль - блок формирования выходных сигналов COG1, соединенный по умолчанию с внутренней двунаправленной шиной, отличающееся тем, что в него дополнительно введен измеритель напряжения, вход которого соединен с выходом источника питания, а выход - с выводом (4) микроконтроллера, кроме того, в составе устройства дополнительно задействованы соединенные с внутренней двунаправленной шиной следующие внутренние периферийные модули микроконтроллера: конфигурируемые логические ячейки CLC1 и CLC2, которые используются в качестве логического элемента «ИЛИ», таймер Timer1, а также разряды «RC6» и «RC0» регистра порта ввода/вывода PORTC, причем разряд «RC0» соединен с выходом COGA блока формирования выходных сигналов COG1 и с выводом (11) микроконтроллера, настроенным как цифровой выход порта ввода/вывода PORTC, а счетный вход таймера Timer1 и вход конфигурируемой логической ячейки CLC1 соединены с выходом внутреннего тактового генератора, выход конфигурируемой логической ячейки CLC1 соединен с входом Rising Event Input Source блока формирования выходных сигналов COG1, вход конфигурируемой логической ячейки CLC2 соединен с выходом таймера Timer1, выход конфигурируемой логической ячейки CLC2 соединен с входом Shutdown source блока формирования выходных сигналов COG1, входы «AN2», «AN11» аналого-цифрового преобразователя ADC соединены соответственно с выводами (4) и (25) микроконтроллера, настроенными как аналоговые входы порта ввода/вывода PORTA, PORTB, соответственно, вывод (25) микроконтроллера соединен с выходом фильтра нижних частот, выход таймера Timer1 соединен с входом Auto-conversion Trigge аналого-цифрового преобразователя ADC, разряд порта «RC6» регистра порта ввода/вывода PORTC соединен с выводом (17) микроконтроллера, настроенным как цифровой выход порта ввода/вывода PORTC.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2717952C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2746039C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2747003C1 |
| EP 0882303 B1, 21.04.2004 | |||
| US 5942892 A, 24.08.1999 | |||
| EP 1302952 B1, 24.04.2013 | |||
| US 6895997 B2, 24.05.2005. | |||
