ел
N3
О5
Изобретение относится к измерительной технике и может быть использовано для определения статических силовых характеристик электромагнитов, упругих элементов и различных силовых устройств.
Целью изобретения является расширение эксплуатационных возможностей устройства и повышение производительности.
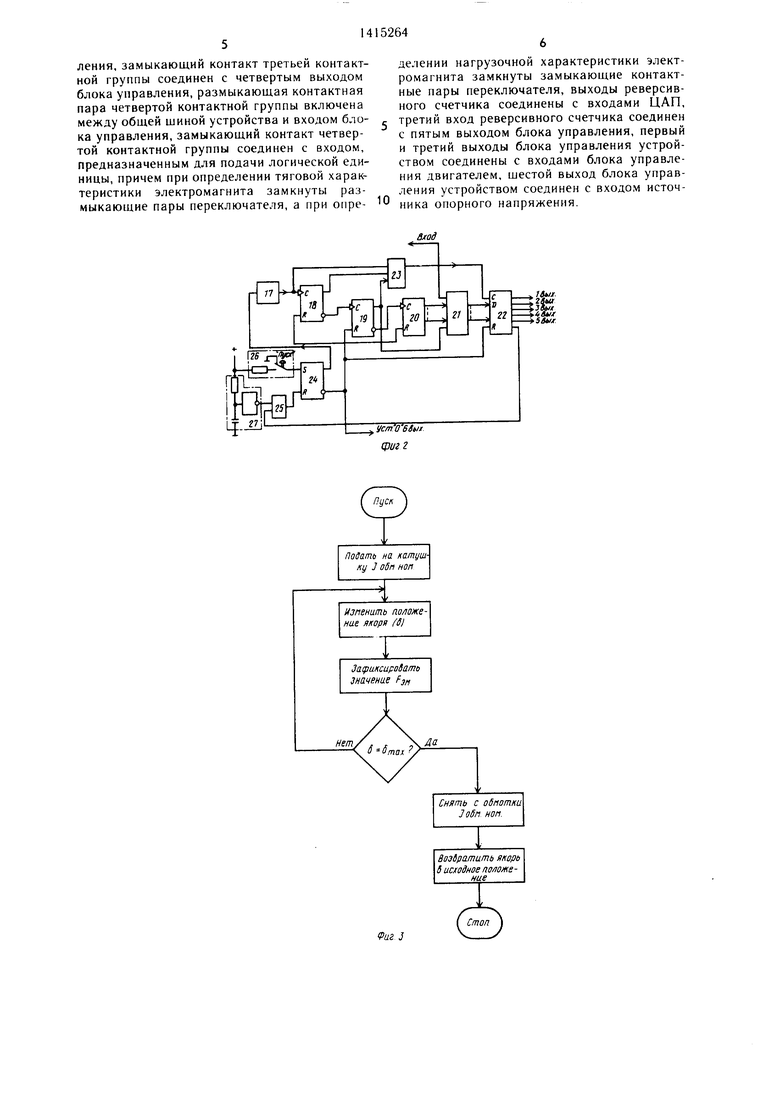
На фиг. 1 приведена блок-схема устройства; на фиг. 2 - схема блока управления устройства; на фиг. 3 и 4 - алгоритмы работы устройства при определении тяговой и нагрузочной характеристик электромагнита.
Устройство состоит из шагоЕЮго электродвигателя 1, ходово|-о винта 2, толкателя с гайкой 3. в которой встроены упругие элементы тензодатчика 4 выводов для подключения испытуемого электро.магнита 5 с якорем 6, блока 7 управления двигателем, управляемого истош1пка 8 тока, усилителей 9 и 10, регистрирующего прибора 11, цифро- аналогового преобразователя (ЦАП) 12, реверсивного счетчика 13, переключателя 14 режимов работы. б, 1с)ка 15 управлепия устройством с одним входом II пестью выходами и источника 16 опорного напряжения.
Шаговый электродвигатель 1 вместе с ходовым винтом 2 и толкателем с гайкой 3 предназначен для фиксации определенного положения якоря 6 относите.тьно неподвижной час1и э;|ектромаг нита 5. Приче.м этог приводно механизм рассчитан так, чтоб) с приходом им ульса ia блок 7 у1 равле1 1Я двигателе.у 1о;1оже 1ие якоря на л,, ( определе П1ую, исходя из требуемой точности измере 1ий).
Тензода чик 4 служит для выдачи сигнала, г рО 1орцио ального силе fiM э.чекг- ромагь ита. и 1 одбираться аким образом. Ч об) деформация элементов даже при максимал)(()м f была значител)Но )e ) iepe- меп1ения якоря 6, чтобы не су цест- венную 1 огре пиост) 1змере 1ие хода якоря.
Блок 7 )авлсн1 Я двигате. юм формирует ., необходим)е для работы nai o- вого электродвигателя 1. С риходом импульса на вход блока 7 обеспечивается единич 1ый OBOpt)T iaroBoro электродвига- 1 в прямом на равлении, а 1ри поступлении второй вход - в обратном.
. 1яемый источник 8 тока осу цеств- ляет формирование тока обмотки электро- i соответствии со значением . (одаваемого на его вход. У 1равляе- мый источник 8 может быть вьп1о., на- , в виде стаби.тизатора тока, д.1я ко -орО Ч) ВХОДН(ЗЙ . является )ЫМ.
Усилители 9 и К) предназначе Ь для усиления маломсяцных си Л{алов до требуем х
Ве.ЧИЧИ.
Регистрируклций рибо|) 1 1 с;|уж т д;1Я фикса 1ии ,ов)х характе) . В качестве pei истрирую 1, |)ибора может быть использован, например, двухкоординатный самописец.
ЦАП 12 преобразует код в аналоговый сигнал.
с Реверсивный счетчик 13 служит для формирования из последовательности импульсов параллельного кода сигнала, поступающего на второй вход регистрируюш.его прибора 11. Переключатель 14 режимов работы подготавливает устройство для определения тя0 говой или нагрузочной характеристик и электромагнита.
Блок 15 управления устройством осу- пгествляет управление всеми частями устройства и имеет шесть выходов 15.1 -15.6.
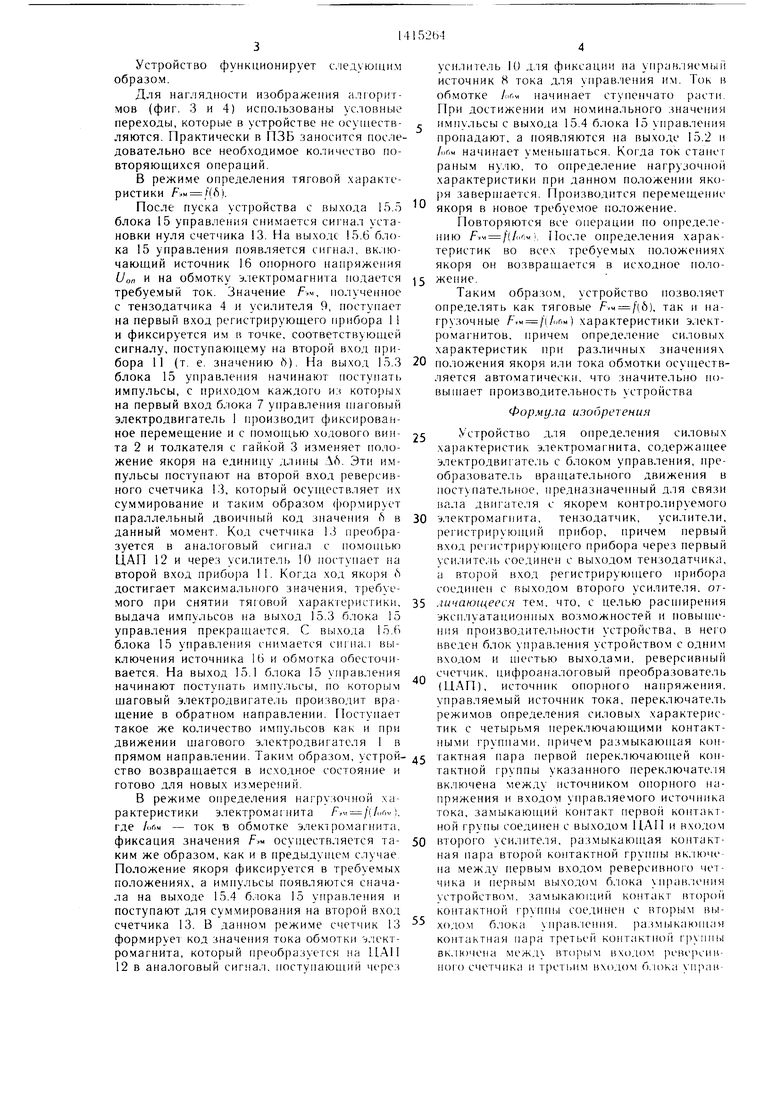
Б.чок 15 управления устройством (фиг. 2) состоит из управляемого генератора 17 им- П льсов, триггеров 18 и 19, счетчика 20, постоянного за 1оминаюп1его блока (ПЗБ) 21, выходного регистра 22, элемента И 23, триг- lepa 24, элемента ИЛИ 25, схемы 26 пуска
0 и схемы 27 установки нулд.
Блок 15 работает следующим образом. При включении питания схема 27 установки нуля фиксирует исходное состояние устройства. С приходом сигнала «Пуск
5 24 устанавливается в единичное состояние и разрешает формирование импульсов генератору 17. На триггерах 18 и 19 со- б)ана пересчетка, с выхода которой импульсы 1 оступают на счетный вход счетчика 20. В з1ходной код счетчика подается на адрес0 ный вход ПЗБ 21. Разрядность счетчика зависит от разрядности адреса ПЗБ. При установивп1емся адресе ПЗБ с триггера 19 1осту 1ает сигнал ia считывание информа- Uin с ПЗБ. С приходом импульса с элемента И 23 информация с ПЗБ записывается
5 в выходной ре истр 22, выходы которого 1одключены к выходам блока управления. С риходом четвертого импульса с -енера- тора изменяется на единицу код счетчика 20 (соответственно адрес ПЗБ), а пересчетка устанавливается в исходное состояние и на чинается цикл опроса ПЗБ по новому адресу 1 установление новых выходных сигналов блока. Процесс продолжается до тех пор, ока вся программа проведения испытаний, ,а 1 1санная в ПЗБ, не будет отработана.
5 В программы в последнюю биту выходной информации записывается единица, которая после занесения в регистр 22 проходит через элемент ИЛИ 25 и сбрасывает т)иггер 24, прекращая работу генератора. В ПЗБ занесены две программы работы уст0 ройства, которые вызываются в зависимости от состояния переключателя 14 режимов работы. Выход переключателя соединен со старп ей битой адреса ПЗБ. При сигнале «О на этом выходе с ПЗБ считывается программа для снятия тяговой характеристики, а при
5 СИ нале «1 - программа для снятия нагрузочной характеристики. Объем ПЗБ зависит от длины программы, т. е. от дискретности 1зменения хода якоря и тока катушки.
Устройство функционирует с.едующим образом.
Для наглядности изображения алгоритмов (фиг. 3 и 4) использованы условные переходы, которые в устройстве не осуществляются. Практически в ПЗБ заносится последовательно все необходимое количество повторяющихся операций.
В режиме определения тяговой .характеристики / aM /((S).
После пуска устройства с выхода 15.5 блока 15 управления снимается сигнал установки нуля счетчика 13. На выходе 15.6 блока 15 управления появляется сигнал, включающий источник 16 опорного напряжения и„„ и на обмотку электромагнита подается требуемый ток. Значение Ам, полученное с тензодатчика 4 и усилителя 9, поступает на первый вход регистрирующего прибора 1 1 и фиксируется им в точке, соответствующей сигналу, поступающему на второй вход прибора 11 (т. е. значению 6). На выход 15.3 блока 15 управления начинают поступать. импульсы, с приходом каждого из которых на первый вход блока 7 управления наговый электродвигатель 1 производит фиксированное перемещение и с помощью ходового винта 2 и толкателя с гайкой 3 изменяет положение якоря на единицу длины Л6. Эти импульсы поступают на второй вход реверсивного счетчика 13, который осунюствляет их суммирование и таким образом формирует параллельный двоичный код значения i в данный момент. Код счетчика 13 преобразуется в аналоговый сигнал с помощью ЦАП 12 и через усилитель 10 поступает на второй вход прибо)а 11. Когда ход якоря (S достигает максимального значения, требуемого при снятии тяговой характеристики, выдача импульсов на выход 15.3 блока 15 управления прекращается. С выхода 15.6 блока 15 управления снимается сигнал выключения источника 16 и обмотка обесточивается. На выход 15.1 б.чока 15 управления начинают поступать импульсы, по которым щаговый электродвигатель производит вращение в обратном направлении. Поступает такое же количество импульсов как и при движении шагового электродвигателя I в прямом направлении. Таки.м образом, устройство возвращается в исходное состояние и готово для новых из.мерений.
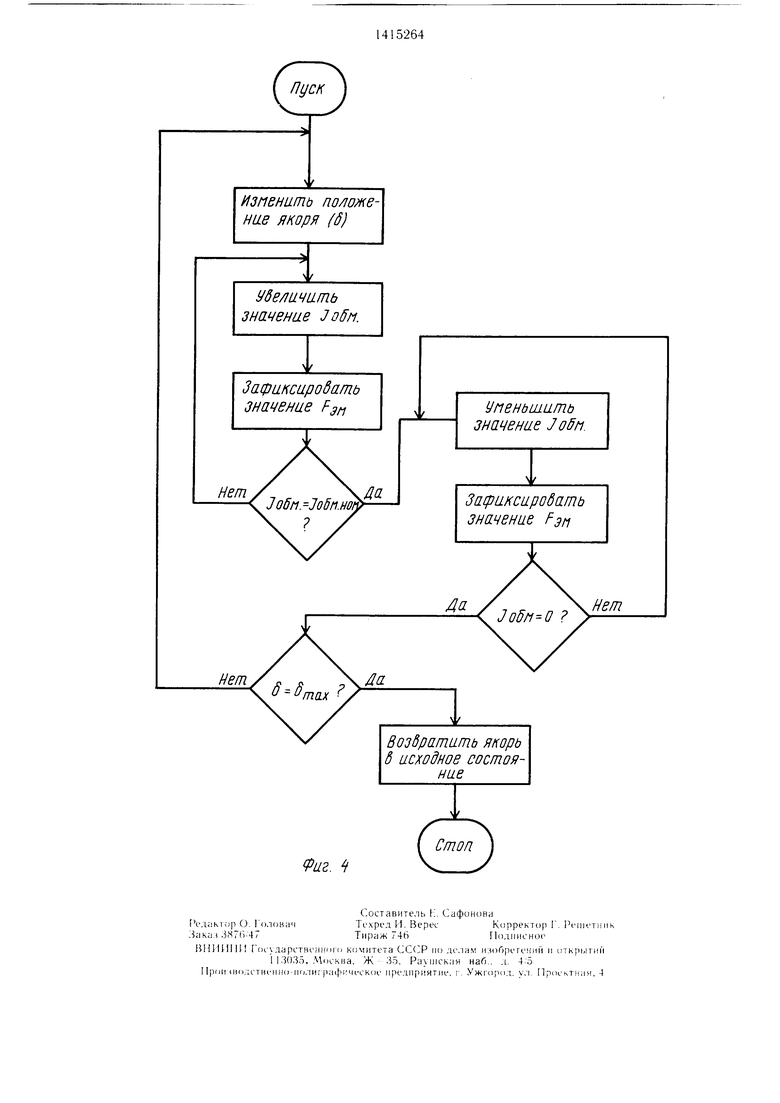
В режиме определения нагрузочной характеристики электрома нита F,:: j(lor,-.-. где /обм - ток в обмотке электромагнита, фиксация значения осущестр ляется таким же образом, как и в предыдущем случае Положение якоря фиксируется в требуемых положениях, а импульсы появляются сначала на выходе 15.4 б.юка 15 управления и поступают для суммирования на второй вход счетчика 13. В данном режиме счетчик 13 формирует код значения тока обмотки электромагнита, который преобразуется на Ц.Л11 12 в аналоговый сигнал, поступающий через
усилитель 10 д.чя фиксации на управ.чяемый источник 8 тока для управления им. Ток в обмотке /(ifiM начинает ступенчато расти. При достижении им номинального значе 1ия
импульсы с выхода 15.4 блока 15 управления пропадают, а появляются на выходе 15.2 и /ибм начинает уменьн1аться. Когда ток станет раным ну.чю, то определение нагрузоч)1ой характеристики при данно.м положении яко- )я завершается. Производится перемещение
якоря в новое требуемое положение.
Повторяются все операции по определению F.( J. После определения характеристик во всех требуемых положепиях якоря он возвращается в исходное поло5 жепие.
Таким образом, устройство позво, 1яет определять как тяговые (6), так и нагрузочные /|/1,бм) характеристики э.чект- poMai-нитов, причем определение силовых характеристик при различных значениях
0 положения якоря или тока обмотки осуществляется автоматически, что значительно ио- вьииает производительность устройства
Формула изобретения
5 Устройство для определения силовых характеристик электромагнита, содержан1ее электродвигатель с блоком управления, преобразователь вращательного движения в поступательное, предназначенный д,тя связи иа.ча двигателя с якорем контролируемого
0 электромагнита, тензодатчик, усилители, регистрирующий прибор, причем первый вход регистрирующего прибора через первый усилитель соединен с выходом тензодатчика, а второй вход регистрирующего прибора соедипен с выходом второго усилителя, от5 личающееся тем, что, с целью расширения эксплуатационных возможностей и повышения производительности устройства, в него введен блок управления устройством с одним входом и нестью выходами, реверсивный счетчик, цифроаналоговый преобразователь (ЦАП), источник опорного напряжения, управляемый источник тока, переключате,1ь режимов определения силовых характеристик с четырьмя переключающими контактными группами, причем размыкающая кон5 тактная пара первой переключающей контактной группы указанного переключате,1Я включена между источником опорного напряжения и входом управляемого источника тока, замыкающий контакт первой коптакт- ной групы соедипен с выходом ПАП и входом
0 второго уси.чителя, размыкающая контактная нара второй контактной группы вк,1юче- на между первым входом реверсивного чет- чика и первым выходом б, 1ока уп|1ав,1ения устройством, замыкающий контакт второй контактной соединен с вторым вы- ходо.м блока управ.чення. размыкаклная контактная пара третьей контактной вк.1Н)чена междч вторым ВХ1)Д()1 реверсивного счетчика II третьим входом б.юка упраи0
5
ления, замыкающий контакт третьей контактной группы соединен с четвертым выходом блока управления, размыкающая контактная пара четвертой контактной группы включена между общей шиной устройства и входом блока управления, замыкающий контакт четвертой контактной группы соединен с входом, предназначенным для подачи логической единицы, причем при определении тяговой характеристики электромагнита замкнуты размыкающие пары переключателя, а при омре
делении нагрузочной характеристики электромагнита замкнуты замыкающие контактные пары переключателя, выходы реверсивного счетчика соединены с входами ЦАП, третий вход реверсивного счетчика соединен с пятым выходом блока управления, первый и третий выходы блока управления устройством соединены с входами блока управления двигателем, шестой выход блока управления устройством соединен с входом источника опорного напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дуговой сварки с поперечными колебаниями сварочной горелки | 1983 |
|
SU1133059A1 |
| Устройство для плавного пуска электроподвижного состава | 1969 |
|
SU279697A1 |
| Устройство для регулирования скорости электроподвижного состава | 1982 |
|
SU1088963A1 |
| Способ определения нагрузочной способности сухих трансформаторов и устройство для его осуществления | 1985 |
|
SU1278732A1 |
| Многодвигательный электропривод | 1990 |
|
SU1818676A1 |
| Устройство для измерения тока срабатывания и отпускания электромагнитов, не имеющих собственных контактных групп | 1974 |
|
SU605200A1 |
| Устройство для измерения уровня электропроводной жидкости | 1986 |
|
SU1348657A1 |
| Устройство для контроля прочности микросоединений | 1982 |
|
SU1027851A1 |
| Устройство для снятия характеристики динамической индуктивности | 1978 |
|
SU789972A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2015040C1 |
Изобретение относится к измерительной технике и может использоваться для онределения силовых характеристик пропорциональных электромагнитов. Цель изобретения - расширение эксплуатационных возможностей и повышение производительности устройства. В устройство, содержащее электродвигатель 1 с блоком 7 управления, преобразователь вращательного движения в поступательное, тензодатчик 4, регистрирующий прибор 11, к первому входу которого через первый усилитель 9 подключен выход тензодатчика 4, а второй вход подключен к выходу второго усилителя 10, введены управляемый источник 8 тока, цифроана- логовый преобразователь 12, реверсивный счетчик 13, переключатель 14 режимов работы, блок 15 управления устройством и источник 16 опорного напряжения. При этом обеспечивается автоматическое определение тяговой Нж f(«5 ) и нагрузочной F,n f(IodH) характеристик пропорционального электромагнита как при увеличении, так и при уменьшении аргумента. 4 ил. ю (Л
iJttit «,&/ ;лмycm O BSut
(Риг 2
Раг 1
Возвратить якорь 8 исходное состояние
| Устройство для снятия силовых характеристик электромагнитов | 1975 |
|
SU547847A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля усилия срабатывания переключателей | 1983 |
|
SU1111136A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ СИЛЫ ТЯГИ ЭЛЕКТРОМАГНИТОВ | 0 |
|
SU318069A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
