1
Изобретение относится к бурению нефтяных и газовых скважин, а именно к механизмам для захвата за гладкую наружную поверхность и удержания на весу колонны труб при производстве спуско-подъемных операций.
Известен спайдер-элеватор, предназначенный для захвата за гладкую наружную поверхность и удержания на весу колонны труб при производстве спуско-подъ-амных операций, включающий неразъемный корпус, клиновые захватные элементы, управляющий и блокирующий механизмы l .
Однако отсутствие проема в корпусе спайдера-злеватора приводит к значительному замедлению и большим неудобствам при съеме спайдера-элеватора с колонны труб по окончании спуска.
Известен спайдер-элеватор, содержащий корпус с конической расточкой его внутренней поверхности, в котором установлены клиновые захватные элементы, створку с проушинами, скрепленную с проушинами корпуса с помощью пальцев, параллельных оси спайдера-элеватора, и механизм подъёма и блокировки клиновых захватных .элементов 2 .
Во время спуско-подъемных операций спайдеры-элеваторы находятся под постоянным воздействием промывочной жидкости, которая смывает смазку с трущихся поверхностей и засоряет их абразивом. При этом коэффициент трения на этих поверхностях может возрасти до ..1 0,22. Этому коэффициенту соответствует угол трения f L2,5°. Угол клиновык элементов, принятый в конструкциях спайдеров-элеваторов, соответствует уклону 1:6 и составляет около 9,5°.
Таким образом, в этом случае угол заострения клиновых элементов становится меньше угла трения, что является условием самоторможения.
Избежать самозаклинивания простым увеличением угла клина не представляется возможньач, так как при этом уменьшается усилие прижима, что может привестн к выскальзыванию трубы из клиновых захватных элементов.
Целью изобретения является повышение надежности работы устройства за счет исклтачения са юзаклиниваяия клиновых захватных элементов в корпусе.
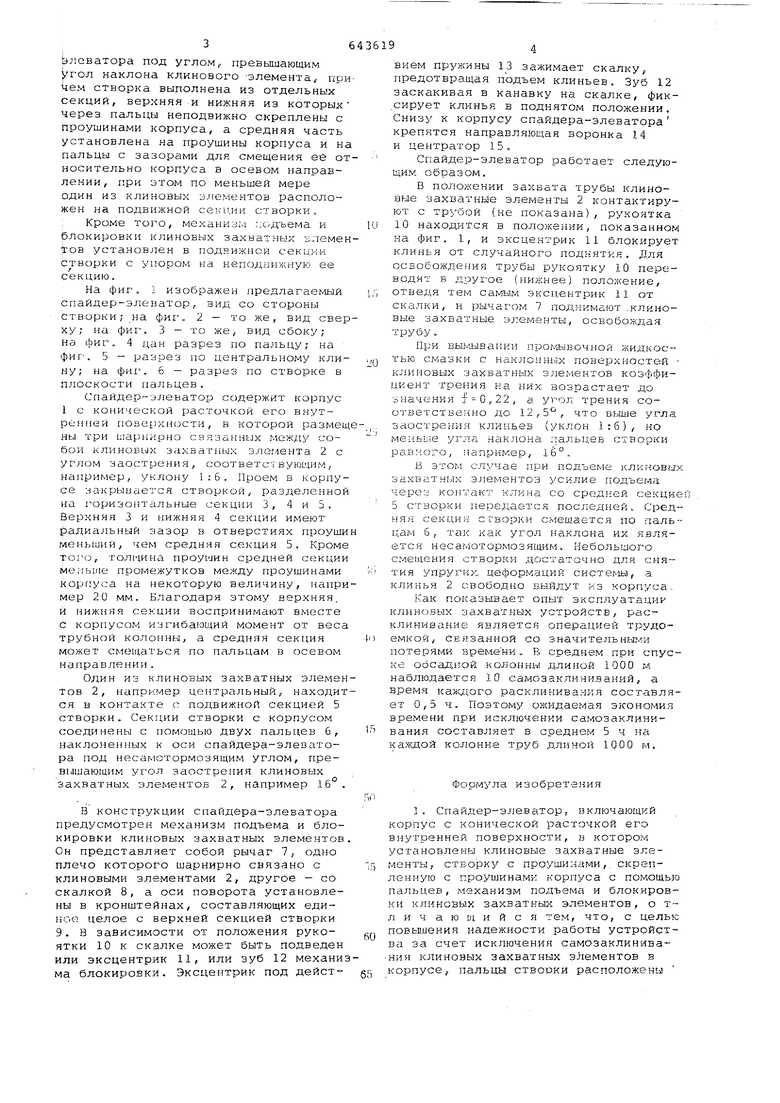
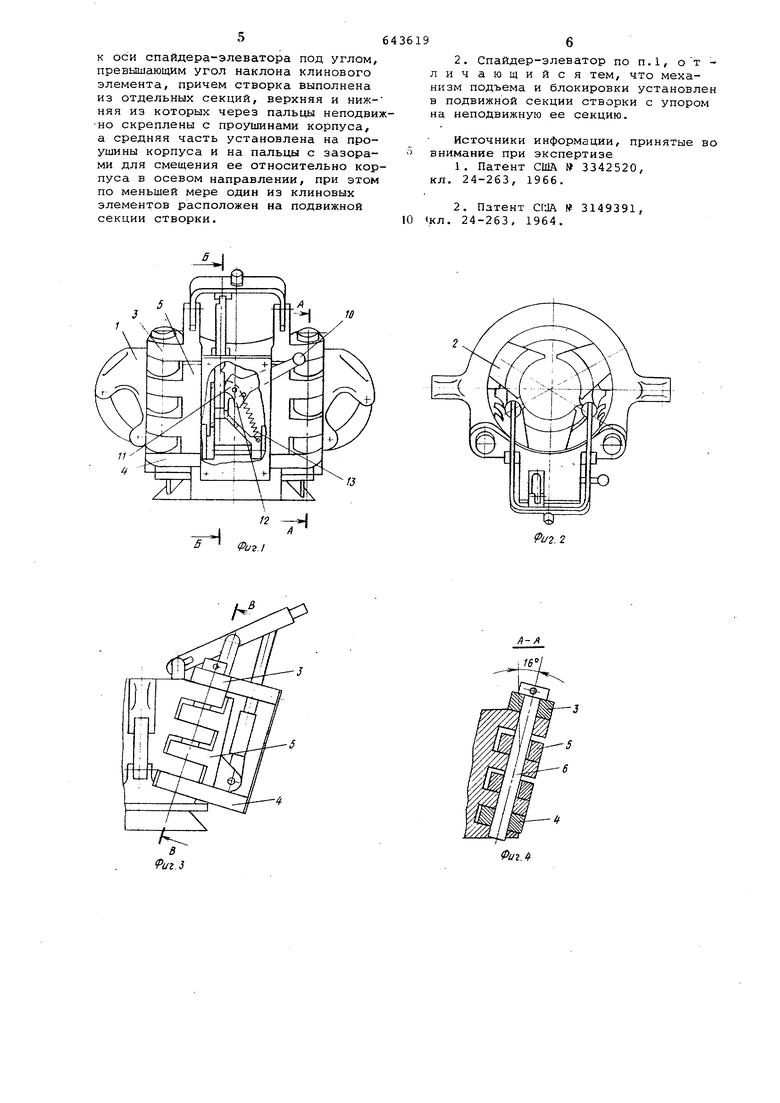
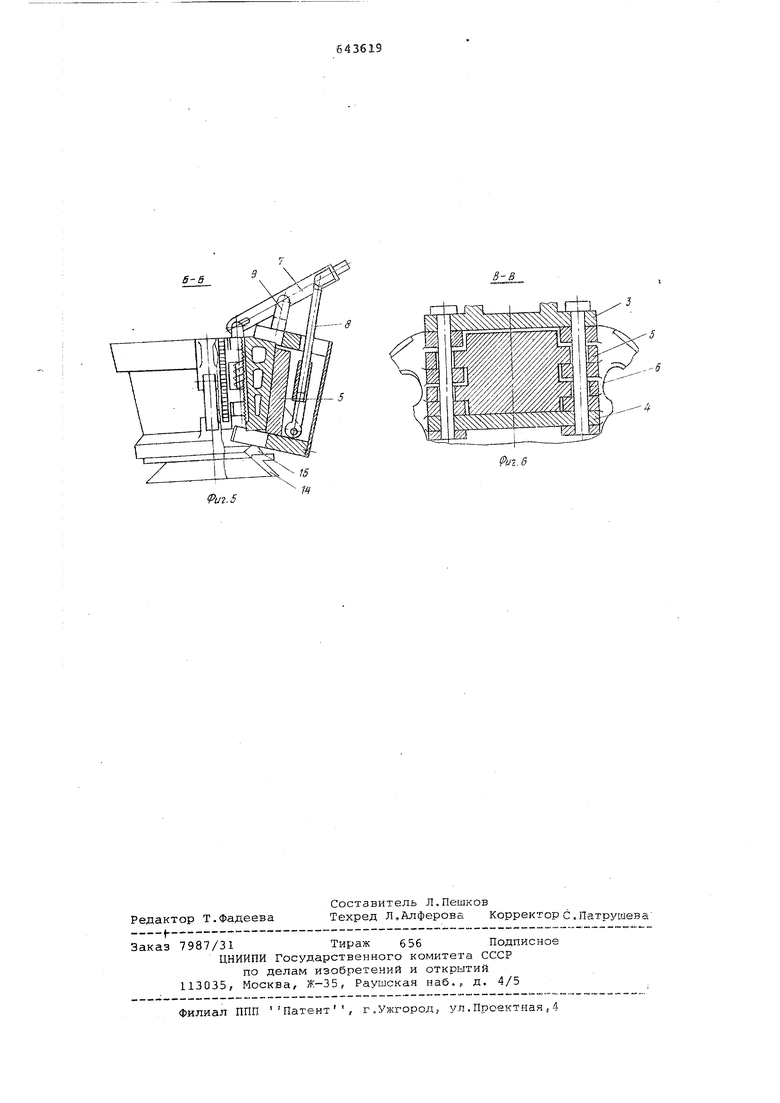
Это достигается тем, что пальцы створки расположены к оси спайдера3Ьлеватора под углом,, превышающим УГОЛ наклона клинового -элемента, при ием створка выполнена из отдельных секций, верхняя и нижняя из которых через пальцы неподвижно скреплены с проушинами корпуса, а средняя часть установлена на проушины корпуса и н пальцы с зазорами для смещения ее от носительно корпуса в осевом направлении, при этом по меньшей мере один из клиновых элементов расположен на подвижной секи.ми створки . Кроме того, механизм ::с-.д-ьема и блокировки клиновых захыатнык алеме tOB установлен в подвижной секцки створки с упором на неподаргжнурэ ее секцию. На фиг. i изображен предлагаемый спайдер-элеватор, вид со стороны створки; на фи1. 2 - то же, вид свер ху; на фи1. 3 - -го же, вид сбоку; на фиг. 4 дан разрез по пальцу; на фиг-. 5 - раарез по центральному клину; на фиг, б разрез по створке в плоскости пальцев. Спайдер-элеватор содержит корпус 1 с конической расточкой его внутренней поверхности, в которой размещ вы три шарнирно связанных между собой клиновых захватных элегдента 2 с углом заострения, соответствующим, например, уклону 1:6. Проем в корпусе закрывается створкой, разделенной на горизонтальные секции 3, 4 и 5. Верхняя 3 и нижняя 4 секции имеют радиальный зазор в отверстиях проуши меньший, чем средняя секция 5. Кроме того, -гол1чина проушин средней секции мемыпе промежутков между проушинами корпуса на некоторую величину, напри мер 20 мм. Благодаря этому верхняя, и нижняя секции воспринимают вместе С корпусом изгибающий момент от веса трубной колонны, а средняя секция может смещаться по пальцам в осевом направлении. Один из клиновых захватных элемен тов 2, например центральный, находит ся в контакте с подвижной секцией 5 створки. Секции створки с корпусом соединены с помощью двух пальцев 6, наклоненных к оси спайдера-элеватора под несамотормозящим углом, превышающим угол заострения клиновых захватных элементов 2, например 16 В конструкции спайдера-элеватора предусмотрен механизм подъема и блокировки клиновых захватных элементов Он представляет собой рычаг 7, одно плечо которого шарнирно связано с клиновыми элементами 2, другое - со скалкой 8, а оси поворота установлены в кронштейнах, составляющих единое целое с верхней секцией створки 9. В зависимости от положения рукоятки 10 к скалке может быть подведен или эксцентрик 11, или зуб 12 механи ма блокировки. Эксцентрик под деист4вием пружины 13 зажимает скалку, предотвращая подъем клиньев. Зуб 12 заскакивая в канавку на скалке, фик.сирует клинья в поднятом положении. Снизу к корпусу спайдера-элеватора крепятся направляющая воронка 14 и центратор 15, Спайдер-элеватор работает следующим образом. В положении захвата трубы клиновые захватные элементы 2 контактируют с трубой (не показана), рукоятка 10 находится в положении, показанном на фиг. 1, и эксцентрик 11 блокирует клинья от случайного поднятия. Для освобождения трубы рукоятку 10 переводят в другое (нижнее) положение, отведя тем самым эксцентрик 11 от скалки, и рычагом 7 поднимают .клиновые захватные элементы, освобождая трубу. При вымывании прок-ивочной жидкостью смазки с наклонных по1зерхнос-тей с1шновых захватных элементов коэффициент треиия на них возрастает до -оначенкя 1 , а угол трения соответственно до 12,5, что выше угла заострения (уклон 1:6), но меньше угла наклона пальцев створки равного, например, 16°. В э-гом случае при подъеме клиновых захватных sJieMeHTOS усилие подъема чере:; контакт клина со средней секцивЕ 5 створки передается последней. Средняя секция сгворки смеш.ается по лаль1гам 6, так как угол наклона их является несамотормозящим. Небольшого смещения створки достаточно для снятия упругих, деформаций систег.-ш, а клинья 2 свободно выйдут из корпуса. Как показывает опыт эксплуатации клинсхоых захватных устройств, расклинивание является операцией трудоемкой, связанной со значите -гьньл/и потерями времени. В среднем при спуске обсалной колонны длиной 1000 м наблюдается 10 самозаклиниваний, а время каж,ого расклиниван;-;я составляе-г 0,5 ч. Поэтому олсидаемая эконо 1ия времени при исключении самозаклинивания составляет в среднем 5 ч на каждой колонне труб длиной 1000 м. Фор1мула изобретения I. Спайдер-элеватор, включающий корпус с конической расточкой его внутренней поверхности, в котором установлен клиновые захватные элементы, створку с проушинами,, скрепленную с проушинами корггуса с помощью пальцев, механизм подъема и блокиров си клиновых захватных элементов, о тл и ч а ю щ и и с я тем, что, с целью повьвления надежности работы устройства за счет исключения самозаклинивания клиновых захватных элементов в корпусе, пальцы СТВОРКИ расположены
к оси спайдера-элеватора под углом, превышающим угол наклона клинового элемента, причем створка выполнена из отдельных секций, верхняя и нижняя из которых через пальцы неподвижно скреплены с проушинами корпуса, а средняя часть установлена на проушины корпуса и на пальцы с зазорами для смещения ее относительно корпуса в осевом направлении, при этом по меньшей мере один из клиновых элементов расположен на подвижной секции створки.
2. Спайдер-элеватор по п.1, от личающийся тем, что механизм подъема и блокировки установлен в подвижной секции створки с упором на неподвижную ее секцию.
Источники информации, принятые во внимание при экспертизе
1.Патент США 3342520, кл, 24-263, 1966.
2.Патент CIJA № 3149391, кл. 24-263, 1964.
i/a./
.2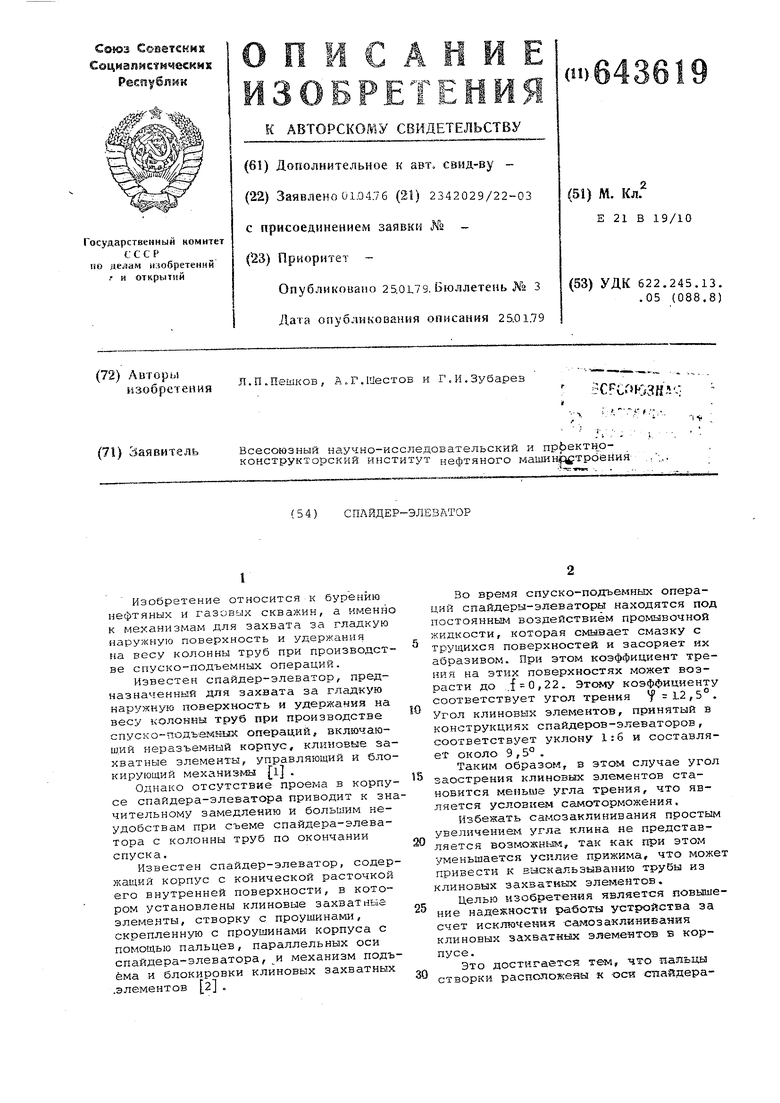
| название | год | авторы | номер документа |
|---|---|---|---|
| СПАЙДЕР ДВУХКОЛОННЫЙ | 2013 |
|
RU2517107C1 |
| Элеватор-спайдер | 1980 |
|
SU891887A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ТРУБ В ТАЛЕВОЙ СИСТЕМЕ | 2000 |
|
RU2176016C1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ТРУБ В ТАЛЕВОЙ СИСТЕМЕ | 2000 |
|
RU2176305C1 |
| КЛИНОВОЙ ЭЛЕВАТОР | 1971 |
|
SU310992A1 |
| Элеватор-спайдер | 1961 |
|
SU143754A1 |
| Элеватор-спайдер | 1980 |
|
SU874960A1 |
| СПАЙДЕР | 1990 |
|
RU2030542C1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ТРУБ | 1989 |
|
RU2068070C1 |
| Элеватор-спайдер | 1981 |
|
SU994679A2 |
ФигЛ
6-6
- 5
Ри-г.5
9иг.6
