(54) ЗУБЧАТО-РЫЧАЖНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА
| название | год | авторы | номер документа |
|---|---|---|---|
| Планетарный зубчатый привод стеклоочистителя | 2023 |
|
RU2815138C1 |
| Планетарная передача с предварительной ступенью | 2022 |
|
RU2782006C1 |
| Планетарный механизм и планетарная передача на его основе | 2018 |
|
RU2677952C1 |
| ЦИКЛОИДАЛЬНО-ЦЕВОЧНАЯ ПЕРЕДАЧА | 2007 |
|
RU2338102C1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| Зубчатый механизм с прерывистым движением выходного звена | 2019 |
|
RU2724005C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| ПЛАНЕТАРНЫЙ ТОРЦОВЫЙ МОТОР-РЕДУКТОР | 1998 |
|
RU2150623C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2013 |
|
RU2539438C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ КРИВОШИПНЫЙ ПРЕОБРАЗУЮЩИЙ МЕХАНИЗМ ПРИВОДА СТАНКА-КАЧАЛКИ | 2005 |
|
RU2303182C2 |
Изобретение относится к машиностроению и может быть использовано в качестве мотор-редуктора для привода различных машин и механизмов.
Известен двухступенчатый соосный редуктор, у которого первая ступень выполнена цилиндрической многопоточной зубчатой передачей внешнего зацепления с обшей ведущей шестерней и с ведомыми колесами, закрепленными неподвижно на кривошипных валах, которые являются опорами шатуна-сателлита планетарной передачи второй ступени редуктора. Сателлит входит в зацепление с колесом внутреннего зацепления с малой разницей чисел зубьев 1.
Однако данный редуктор требует высокой точности изготовления деталей для обеспечения совместной работы ведущих кривошипов и применения большого числа подшипников.
Наиболее близкой по технической сущности к описываемому устройству является зубчато-рычажная планетарная передача, содержащая параллельные входной и выходной валы, установленное на выходном валу центральное колесо с внутренними зубьями, зацепляющийся с ним сателлит, закрепленный на последнем щатун и два кривошипа, шарнирно связанные с шатуном и образующие параллелограммный механизм, кинематически связанный с входным валом 2.
Однако известная передача обладает сравнительно большими поперечными габаритами в связи с тем, что межосевое расстояние передачи определяется габаритами центрального колеса с внутренними зубьями, а зубчатые колеса кинематической связи параллелограммного механизма с входным
- валом выходят за габариты этого центрального колеса.
Цель изобретения - упрощение конструкции и сокращение габаритов.
Поставленная цель достигается тем, что кинематическая связь параллелограммного
15 механизма содержит щестерню, установленную на входном валу, и взаимодействующие с ней и с кривошипами два колеса, одно из которых взаимодействует с одним из кривошипов, а другое свободно установлено на выходном валу через другой криво20 шип, являющийся его ступицей.
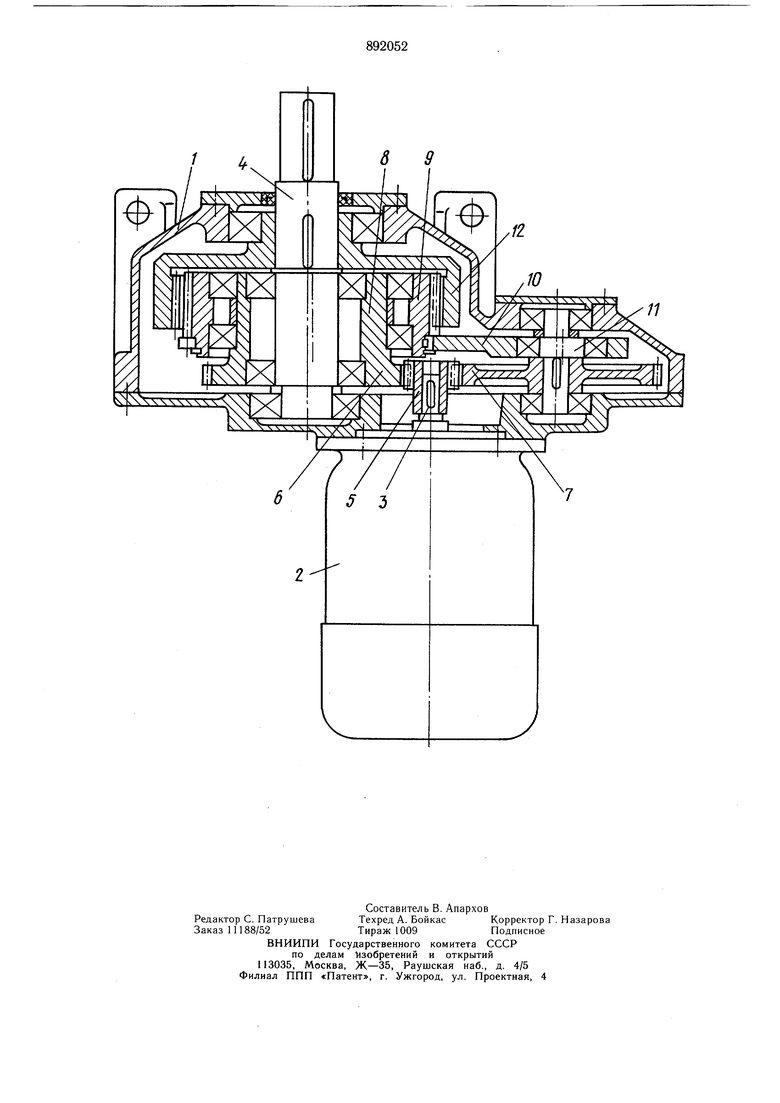
На чертеже изображена зубчато-рычажная планетарная передача, выполненная как мотор-редуктор.
Передача содержит корпус 1, жестко закрепленный на нем электродвигатель 2. Вал 3 последнего является входным валом редуктора. Выходной вал 4 редуктора параллелен входному. На входном валу 3 установлена шестерня 5, зацепляющаяся с колесами 6 и 7, имеющими равное число зубьев. Колесо 6 подвижно и соосно установлено на подщипниках качения на выходном валу 4 и имеет удлиненную ступицу, выполненную в виде эксцентрика 8. На ступице на подшипниках качения установлен сателлит 9, который через жестко связанный с ним шатун 10 опирается через подшипник качения на эксцентрическую щейку 11 вала колеса 7, имеющую тот же эксцентриситет, что и эксцентрик 8. Сателлит 9 щатун 10, эксцентрик 8 и эксцентричная шейка И, являющиеся кривошипами, образуют параллелограммный механизм, кинематическая связь которого с входным валом 3 осуществляется с помощью колес б и 7 и шестерни 5.
Сателлит 9 входит в зацепление с центральным колесом 12 с внутренними зубьями, число которых близко к числу зубьев сателлита 9. Колесо 12 установлено на выходном валу 4.
Передача работает следующим образом.
При вращении входного вала 3 с шестерней 5 вращения передается колесам 6 и 7, которые посредством эксцентрика 8, эксцентричной шейки 11, выполняющими роль кривошипов, сообщают круговое поступательное движение сателлиту 9. Зацепляясь с колесом 12, сателлит 9 за один оборот колес 6 и 7 поворачивает колесо 12 на число
его угловых шагов, равное разности чисел зубьев сателлита 9 и колеса 12.
Предлагаемая передача позволяет осуществлять вращение выходного вала с больщи м передаточным отношением, в то время как существующие мотор-редукторы для этого случая имеют сложную конструкцию. Компановка сателлита на выходном валу позволяет уменьшить осевые габариты передачи.
Формула изобретения
Зубчато-рычажная планетарная передача, содержащая параллельные входной и выходной валы, установленное на выходном валу центральное колесо с внутренними
зубьями, зацепляющийся с ним сателлит, закрепленный на последнем шатун и два кривощипа, шарнирно связанные с шатуном и образующие параллелограммный механизм, кинематически связанный с входным валом, отличающаяся тем, что, с целью упрощения
конструкции и сокращения габаритов, кинематическая связь параллелограммного механизма содержит шестерню, установленную на входном валу и взаимодействующие с ней и с кривощипами два колеса, одно из которых взаимодействует с одним из кривощипов, а другое свободно установлено на выходном валу через другой кривошип, являющийся его ступицей.
Источники информации, принятые во внимание при экспертизе
