(54) СПОСОБ ОПРЕДЕЛЕНИЯ РАСПРЕДЕЛЕНИЯ МАГНИТНОГО ПОЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитометр | 1979 |
|
SU898348A1 |
| КОСМИЧЕСКИЙ АППАРАТ СО СТАБИЛИЗАЦИЕЙ ВРАЩЕНИЕМ | 1997 |
|
RU2136550C1 |
| ДАТЧИК, СПОСОБ И СИСТЕМА ТЕКУЩЕГО КОНТРОЛЯ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2007 |
|
RU2437105C2 |
| КОСМИЧЕСКИЙ АППАРАТ СО СТАБИЛИЗАЦИЕЙ ВРАЩЕНИЕМ | 2011 |
|
RU2481246C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ДЕФЕКТА ЭЛЕКТРОПРОВОДЯЩИХ ЭЛЕМЕНТОВ КАБЕЛЯ | 2018 |
|
RU2701754C1 |
| МУЛЬТИПОЛЬНАЯ МАГНИТНАЯ ЛОВУШКА ДЛЯ ПЛАЗМЫ | 2010 |
|
RU2430493C1 |
| МАГНИТОТЕРАПЕВТИЧЕСКИЙ АППАРАТ | 1997 |
|
RU2129447C1 |
| Способ измерения коэрцитивной силы цилиндрических тонких магнитных пленок | 1975 |
|
SU555355A1 |
| Способ одновременной генерации магнитного поля и термостабилизации квантового датчика вращения и устройство для его реализации | 2023 |
|
RU2802341C1 |
| ВЫСОКОВОЛЬТНОЕ ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОКА | 2007 |
|
RU2346285C1 |
л . ,
Изобретение относится, к технике itsMepeHHH магнитных.величин, в част нести, к способам определения распределения магнитного поля, вдоль заданной оси магнитной системы.
Известны способы, определения. расЬределения магнитного поля пу тем разложения 44агнитного поля на мультиполя и измерения.их магнитных индукций с помощью датчиков индукции, магнитного поля, с последующей обработкой информации .
При этом возникает.необходимость произвести-дискретные измерения индукции магнитного-поля во многих точках и учестьинструментальный и методические-погрешности во времй обработки данных, что усложняет съем и обработ|су информации.
Известен способ определения распределения магнитного лоля вдоль заданной оси.магнитной системы, путем перемацения л -магнитное поле токонесущего проводника,, натянутоГО меяпУ двумя опорами и закрепленного с ними на расстоянии больше длины заданной оси магнитной систеьш. Токонесущий проводник питают током гармонической формы с фикси- ,рованной частотой в 35 раз меньше собственной частоты токонесущего проводника и измеряют сумму опорных реакций, пропорциональную возникаю щей пондермоторной силе- Ампера. Ког10да сумма опорных реакций равна нулю (сумма выходных сигналов, электромеханических преобразователей с учетом их знаков и погрешностей преобразования и измерения), магнит15ное поле, распределено вдоль заданной оси магнитной системытак, что интегральное магнитное поле равно нулю. В противном случае- появляется сигнал, пропорцнональный интегральному магнитному полю 1121.
Heдocтaткa « этого способа являются сложность л.низкая точность определения центраиьно симметричного распределения магнитного поля вдоль заданной оси магнитной системы.
Цель изобретения - упрощенна способа.
Поставленная лдель. достигается . тем, что в способе-определения распределения магнитного ноля, включакя(«м воздействие магнитного поля вдоль заданной оси на проводник с гармоническим током и измерение суммы опорных реакций проводника, совмеа|ают середишл .проводника и заданной оси магнитной системы и изменяют частоту гармонического тока в проводнике в пределах .от нуля до резонансной частоты.
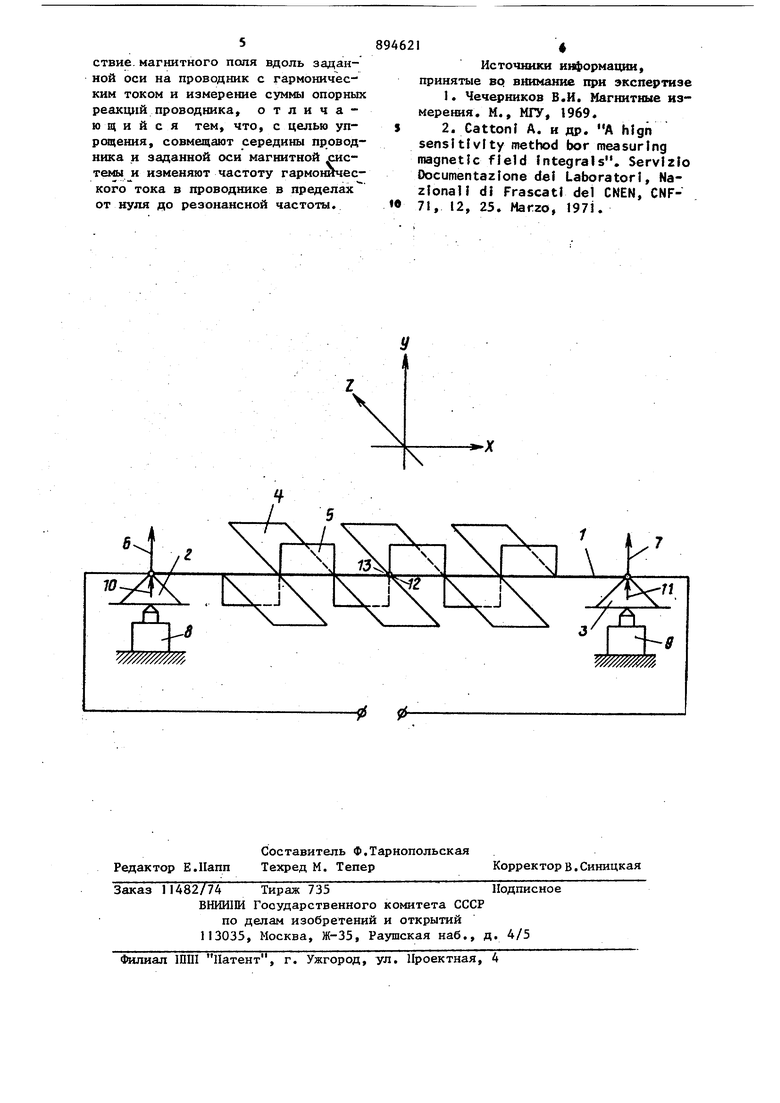
На чертеже представлена схема ойществления предлагаемого способа.
Токонесущий проводник 1, натянутый двумя неподвижными опорами 2 и 3 и закрепленный с ними, помещают вдоль заданной оси ;х периодического магнитного поля 4, имеющего направление ,Z (направления на чертеже показаны системой прямоуголышх координат). Дпя примера распределение.переменного.магнитного поля 4 имеет, вид прямоугольников Когда через токонесущий проводник течет постоянный .ток по направлению Эс , то на него действует .пондермоторная сила 5 Ампера по направлен . . Эта сила всегда уравновевшвается суммой опорных реакций 6 и 7, которые измеряются с помощью двух датчиков 8 и 9 силы (направление у совмещено с осью чувствительности дчиков 8 и 9 силы). Когда .токонесущий проводник 1. питают гармоническим током, то возникающая. повдермоторная сила 5 Ампера и опорные реакхщи б и 7 являются амплитудно модулированными с частотой гармонического тока. В этом-случае повдермоторная сила 4 должна уравновешиваться с опорными .реакциями 6 и 7 в каждый момент времени. Однако в виду того, что токонесущий проводник 1 с гармоническим током, натянутый ыежцу двумя неподвижньош опорами 2 и 3 представляет собой механическую систему с присущей ей собственной частотой колебаний и при помещении ее в магнитное поле, совершает.вынужденное колебание под действием.возникающей переменной пондермоторной силы Ампера, то при изменении часто питающего тока, начиная от нуд до
резонансной частоты механической системы, возникает.увеличение амплитуды колебания и. на опорах 2 и 3 токонесущего проводника 1 появляются дополнительные усилия 1О и 11, имеющие направления -реакций 6 и 7. Сумму опорных реакций 6 и 7, по принципу суперпозиции, можно разложить на сумму опорных реакций от каяздой силы, действуикцей на разных участках токонесущего проводника. Величина суммы опорных реакций от каждой силы зависит от динамического характера воздействия.этой силы на (оконесущий проводник 1 и при гармоническом токе увеличивается с увеличением его частоты. Динамические составляющие опорных реакций равны нулю при постояннее токе и имеют максимальное значение во время резонанса. Когда токонес ций проводник 1 с.гармоническим током помещен в магнитном поле 4 так, что его середина 12 еовмещена с серединой 13 заданной оси магнитной системы и для суммы опорных реакций от силы существует cyteca реакций от другой силы, равная по величине и противоположная по знаку с учетом динамических, составляющих опорных реакций, то. cytoia опорных реакций/от всех .сил,действуие их на токонесущий про. водник I равна нулю при изменении .частоты тока в .токонесущем проводнике i в интервале от нуля до резонансного значения механической систеьш. Это имеет место только при центрально гимметричном распределении сил вдоль токонесущего проводлика, следовательно, при центрально симметричнсж распределении магнитttoro поля адоль заданной оси магнитной системы. При наличии погрешностей измерения, сумма опорных реакций от изменения частоты тока остается постоянной ва уровне погрешнрстей.
Применение настоящего способа определения распределения магнитного поля в щ вобразовательной технике более, чем на псфядок упр яцает съем и информации при определении центрально симметричного распределения магнитного поля вдоль заданной оси магнитнойсистемы.
Формула изобретения Способ определения распределения магнитного поля, включающий воздействие. магнитного поля вдоль заданной оси на проводник с гармоническим током и измерение суммы опорных реакций проводника отличающийся тем, что, с целью упрощения, совмещают середины проводника и заданной оси магнитной системы и изменяют частоту гармо1шческого тока в проводнике в пределах от нуля до резонансной частоты.
94621i
Источники информации, принятые BQ внимание при экспертизе 1. Чечарников В,И. Магнитные измерения. М., МГУ, 1969. 5 2. CattonI А. и др. А sensitivity method bor measuring magnetic field Integrals, Servlzio Oocumentazlone del Laboratorl, Nazlonall di Frascatl del CMEN, CNF« 71, 12, 25. Marzo, 1971.
