Предлагаемое изобретение относится к космической технике и может быть использовано в космических аппаратах, стабилизируемых вращением.
Известен космический аппарат со стабилизацией вращением, содержащий корпус аппарата, развертываемые солнечные батареи, размещенные симметрично относительно оси максимального момента инерции аппарата и снабженные токосборными силовыми контурами, объединенными с группами последовательно соединенных фотоэлектрических преобразователей батарей, а также подключенными к токосборным контурам, экранированными от внешнего магнитного поля токонесущими проводами, при этом токосборные силовые контуры и фотоэлектрические преобразователи объединены с обеспечением согласно направления их токов относительно корпуса аппарата [1] .
Недостатком указанного космического аппарата является необходимость регулирования скорости собственного вращения аппарата при превышении ее оптимального значения, особенно при работе батарей в режимах перегрузок либо короткого замыкания, когда момент силы Ампера, приложенной к аппарату в результате взаимодействия токов солнечных батарей с магнитным полем Земли, будет значительно превышать действие тормозящих факторов.
Целью предлагаемого решения является времяимпульсное управление поддержания угловой скорости собственного вращения космического аппарата в заданных пределах путем управления компенсирующим воздействием, являющимся результатом взаимодействия токов солнечных батарей и магнитного поля Земли, на влияние возмущающих факторов.
Поставленная цель достигается управлением времени подключения к токосборным силовым контурам экранированных от внешнего магнитного поля Земли проводов или неэкранированных токонесущих проводов посредством вентилей, управляющие входы которых через симметричный триггер, устройство сравнения имеют связь с выходом датчика угловой скорости космического аппарата, содержащего: корпус; датчик угловой скорости относительно оси вращения; развертываемые солнечные батареи, размещенные симметрично относительно оси максимального момента инерции космического аппарата и снабженнные токосборными силовыми контурами, объединенными с группами последовательно соединенных фотоэлектрических преобразователей батарей с обеспечением согласно направления их токов, относительно корпуса космического аппарата; экранированные от внешнего магнитного поля токонесущие провода подключены к токосборным контурам посредством вентилей; неэкранированные токонесущие провода подключены к токосборным контурам посредством вентилей; устройство сравнения; генератор пилообразного напряжения; заторможенный блокинг-генератор; симметричный триггер; вентили.
На фиг. 1 представлен чертеж предлагаемого космического аппарата, состоящего из корпуса 1, датчика угловой скорости относительно оси вращения 2, солнечных батарей 3, размещенных симметрично относительно оси максимального момента инерции космического аппарата и снабженных токосборными силовыми контурами 4, объединенными с группами последовательно соединенных фотоэлектрических преобразователей 5 батарей с обеспечением согласного направления их токов относительно корпуса 1 космического аппарата, экранированными от внешнего магнитного поля токонесущими проводами 6, 14, подключенными к токосборным контурам 4 посредством вентилей 7, при этом параллельно экранированным токонесущим проводам 6 к токосборным силовым контурам 4 подключены неэкранированные токонесущие провода 8, 15 посредством вентилей 9, управляющих входы вентилей 7, 9 через симметричный триггер 10, заторможенный блокинг-генератор 11, устройство сравнения 12, к которому подключен генератор пилообразного напряжения 13, имеют связь с выходом датчика угловой скорости относительно оси вращения 2.
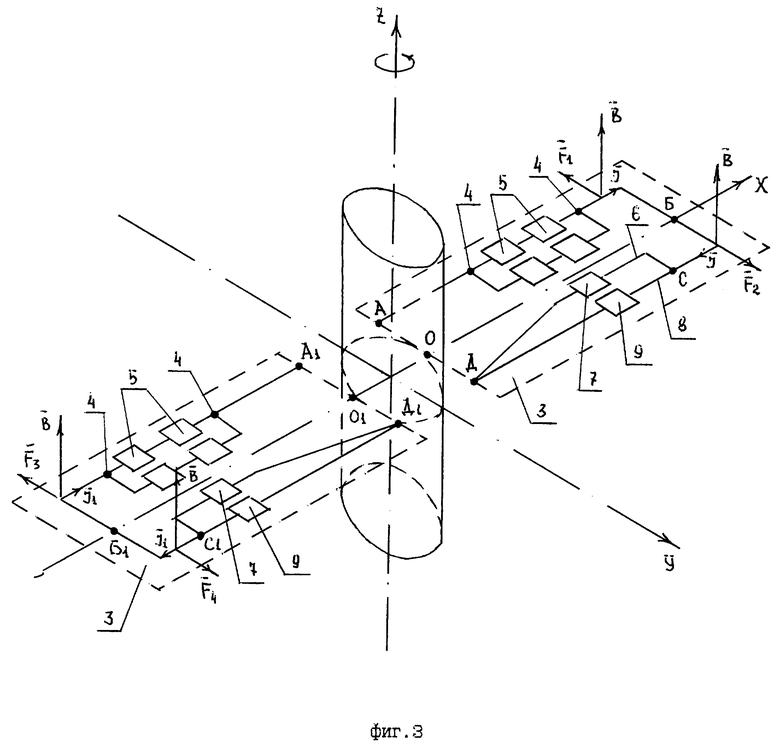
При движении космического аппарата со стабилизацией вращения по орбите искусственного спутника Земли, магнитное поле Земли будет воздействовать согласно закона Ампера на его солнечные батареи с силой (смотри фиг. 3)


где B - индукция магнитного поля Земли;
I - ток солнечной батареи;
L1 - длина токосборного контура и проводов солнечной батареи от точки А до точки Б;
L - длина экранированного провода солнечной батареи от точки С до точки Д;
L2 - длина неэкранированного провода от точки Б до точки Д.
Принимаем L1 = L2, тогда
Момент силы Ампера, приложенный к космическому аппарату, будет равен
где n - количество развертываемых солнечных батарей;
M - момент силы Ампера.
Величина углового ускорения космического аппарата, создаваемого воздействием магнитного поля Земли и токов развертываемых солнечных батарей, согласно второй закона Ньютона для вращающихся тел, составит
где E - величина углового ускорения;
J - момент инерции космического аппарата.
Из выражения (1) видно, что если экранированный участок проводника L будет отключен от цепи солнечной батареи, а вместо него подключен неэкранированный проводник, то величина силы Ампера станет равна нулю. Таким образом, регулируя время подключения экранированного проводника в цепь солнечной батареи, мы можем регулировать скорость вращения космического аппарата по линейному закону практически с любой точностью.
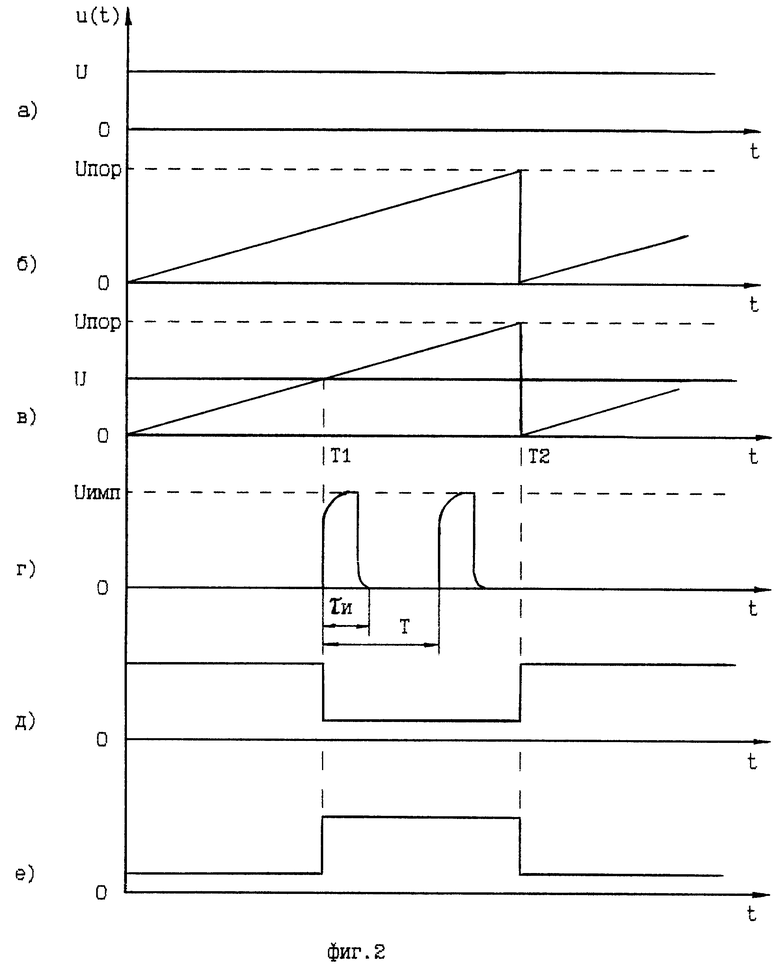
Рассмотрим принцип управления угловой скоростью вращения космического аппарата, представленного на фиг. 1. С датчика угловой скорости относительно оси вращения 2 приходит сигнал рассогласования на устройство сравнения 12, если частота вращения меньше чем номинальная (смотри эпюру (a) фиг. 2). На устройство сравнения 12 поступает также пилообразное напряжение с генератора пилообразного напряжения 13. При совпадении напряжений устройство сравнения 12 закрывается, срабатывает блокинг-генератор 11, первый импульс которого перебрасывает симметричный триггер 10 в противоположное состояние. С одного выхода симметричного триггера 10 (смотри эпюру (e) фиг. 2) сигнал поступает на вентили 9, а с инверсного выхода (смотри эпюру (д) фиг. 2) - на вентили 7. Вентили 9 открываются, а 7 - закрываются. При достижении напряжении U порог., генератором пилообразного напряжения, симметричный триггер 10 возвращается в исходное состояние.
Следовательно (смотри эпюру (в) фиг. 2), на участке O - T1 в цепь солнечной батареи подключен экранированный проводник 6, действуют сила Ампера, согласно выражения (1) - космический аппарат раскручивается, а на участке T1 - T2 - подключен экранированный проводник 14, космический аппарат - тормозится. Таким образом обеспечивается уравнение угловой скорости относительно оси вращения в требуемых пределах.
Точностью управления определяется порогом чувствительности датчика угловой скорости относительно оси вращения 2 и фронтом импульса блокинг-генератора (смотри эпюру (г) фиг. 2).
Отслеживание заданной угловой скорости космического аппарата относительно оси вращения осуществляется в ключевом режиме.
Таким образом, по сравнению с прототипом, применение данного технического решения позволяет обеспечить поддержание угловой скорости космического аппарата относительно сои вращения с заданной точностью.
Источники информации
1. О. Никонов. Космический аппарат со стабилизацией вращением. Заявка 93057506\11(057692) от 28.12.93 г. Опубликована 20.10.95 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОСМИЧЕСКИЙ АППАРАТ СО СТАБИЛИЗАЦИЕЙ ВРАЩЕНИЕМ | 2011 |
|
RU2481246C1 |
| КОСМИЧЕСКИЙ АППАРАТ СО СТАБИЛИЗАЦИЕЙ ВРАЩЕНИЕМ | 1996 |
|
RU2130409C1 |
| КОСМИЧЕСКИЙ АППАРАТ СО СТАБИЛИЗАЦИЕЙ ВРАЩЕНИЕМ | 1993 |
|
RU2088494C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 1999 |
|
RU2174092C2 |
| СПОСОБ КОМПЕНСАЦИИ СДВИГА ИЗОБРАЖЕНИЯ | 1991 |
|
RU2018895C1 |
| МАГНИТНЫЙ КОМПАС | 1994 |
|
RU2089855C1 |
| Способ управления движением космического аппарата с управляемой ориентацией | 2020 |
|
RU2767648C1 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| СПОСОБ КОМПЕНСАЦИИ СДВИГА ИЗОБРАЖЕНИЯ | 1991 |
|
RU2018894C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО МОМЕНТА СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА С СИСТЕМОЙ СИЛОВЫХ ГИРОСКОПОВ | 2000 |
|
RU2176972C1 |
Изобретение относится к космической технике и может быть использовано в космических аппаратах, стабилизируемых вращением. Согласно изобретению космический аппарат содержит корпус; датчик угловой скорости относительно оси вращения; солнечные батареи; токосборные силовые контуры; фотоэлектрические преобразователи батарей; экранированные и неэкранированные от внешнего магнитного поля токонесущие провода; устройство сравнения; генератор пилообразного напряжения; заторможенный блокинг-генератор; симметричный триггер; вентили. В полете производят управление временем подключения к контурам экранированных или неэкранированных проводов. Это осуществляют посредством вентилей, управляющие входы которых через указанные триггер и устройство сравнения связаны с выходом датчика угловой скорости. Изобретение обеспечивает поддержание угловой скорости с любой заданной точностью в результате регулирования взаимодействия токов солнечных батарей и магнитного поля Земли. При этом снижаются потери электрической энергии, а управление становится более эффективным. 3 ил.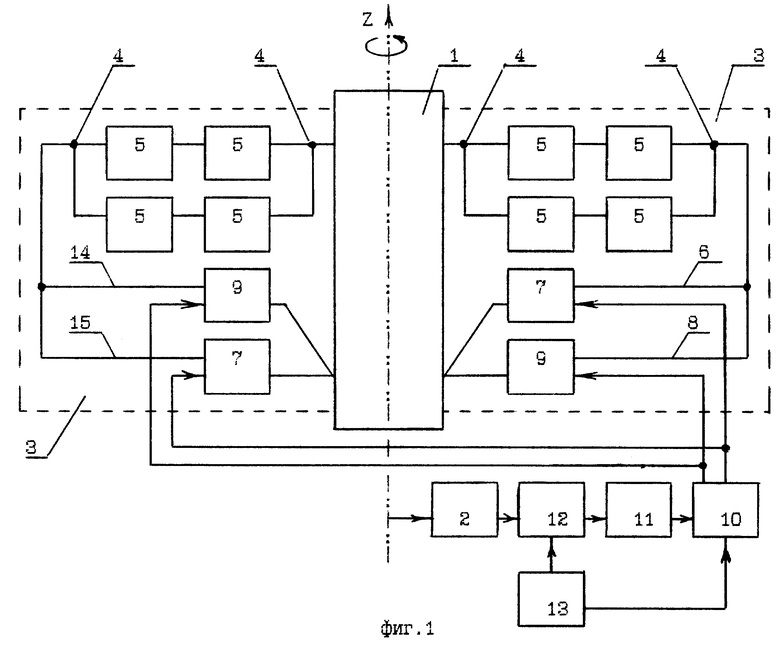
Космический аппарат со стабилизацией вращением, содержащий солнечные батареи, размещенные симметрично относительно оси максимального момента инерции аппарата и снабженные токосборными силовыми контурами, объединенными с группами последовательно соединенных фотоэлектрических преобразователей солнечных батарей с обеспечением согласного направления их токов относительно корпуса аппарата, экранированные токонесущие провода, подключенные к токосборным силовым контурам, и неэкранированные токонесущие провода, подключенные к указанным токосборным контурам параллельно токонесущим проводам, отличающийся тем, что он снабжен датчиком угловой скорости относительно оси вращения аппарата, при этом указанные экранированные и неэкранированные токонесущие провода подключены к указанным токосборным силовым контурам посредством вентилей, управляющие входы которых через симметричный триггер, заторможенный блокинг-генератор и устройство сравнения, к которому подключен генератор пилообразного напряжения, связаны с выходом указанного датчика угловой скорости.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| RU N 93057506/28, A1, 20.10.95 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Современное состояние и перспективы развития космического вооружения США | |||
| - Л.: ВИКИ им.А.Ф.Можайского, 1986, с | |||
| Огнетушитель | 0 |
|
SU91A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Попов В | |||
| Системы ориентации и стабилизации космических аппаратов | |||
| - М.: Машиностроение, 1986, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Грилихес В | |||
| и др | |||
| Солнечная энергия и космические полеты | |||
| - М.: Наука, 1984, с | |||
| Способ получения продукта конденсации бетанафтола с формальдегидом | 1923 |
|
SU131A1 |
