Изобретение относится к приборострое- рию, в частности к механизмам перемещения носителя информации, и может быть использовано в приводах устройств автома- |ики и робототехники, например в манипу- ирующих устройствах.
Цель изобретения - уменьшение неравномерности и повышение скорости углового пюложения ротора.
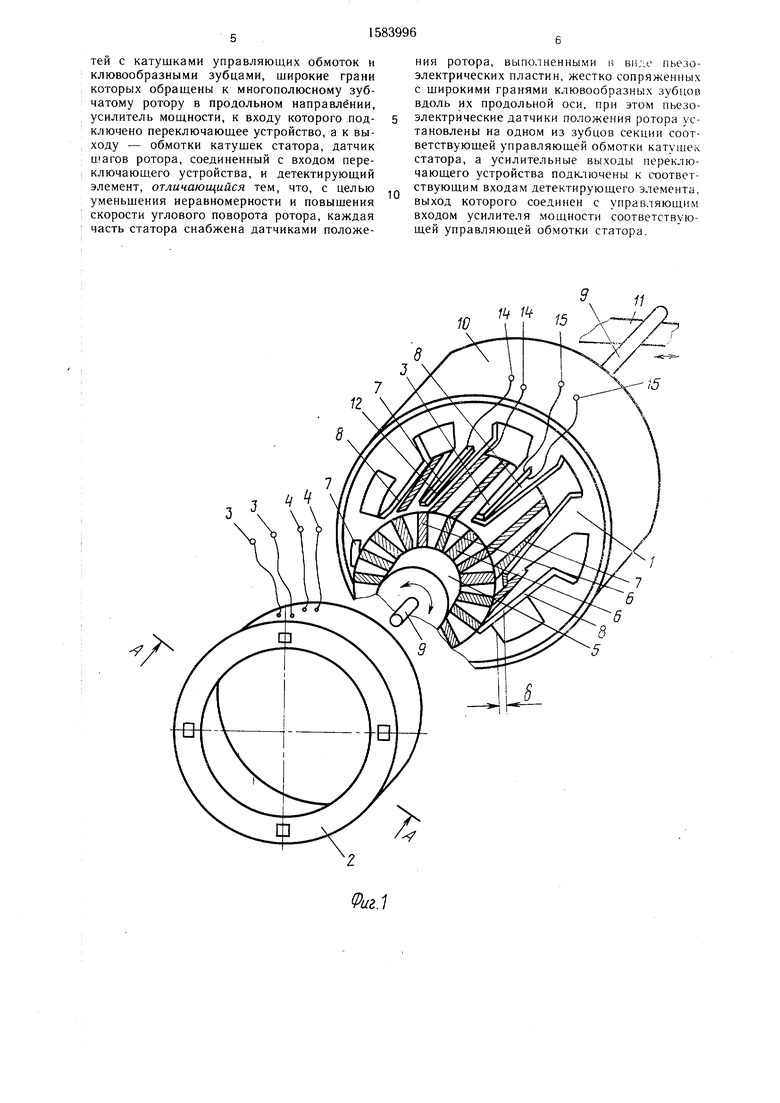
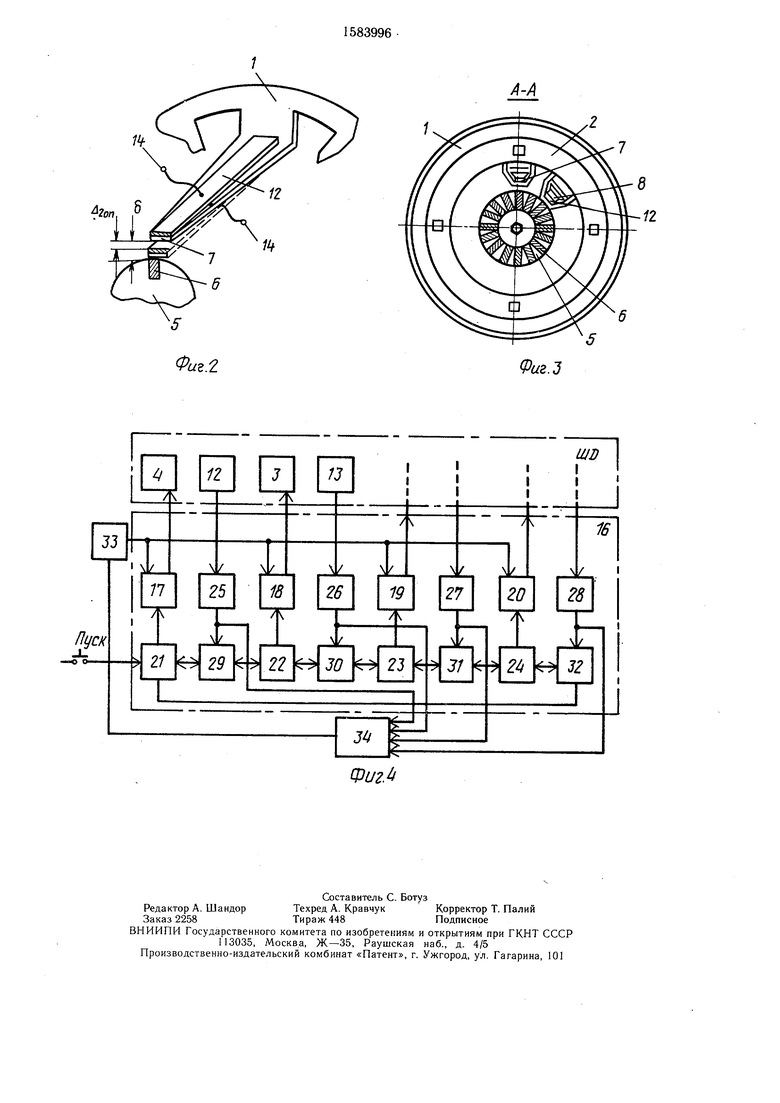
На фиг. 1 и 2 показана одна часть ста- т.ора с датчиком-положения ротора и фазными управляющими обмотками катушки; на оиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - структурная схема переключения и регулирования напряжения питания управляю- 1Цих обмоток статора.
Статор 1 шагового двигателя имеет иден- т ичные среднюю и крайнюю части с катуш- (|ой 2, фазными управляющими обмотками 3 и 4, ротор 5, представляющий собой многополюсную зубчатую конструкцию с постоянными магнитами 6.
Число полюсов зубчатого активного ротора равно количеству повернутых один к другому консольно расположенных клювообраз- ных зубцов.
Часть статора согласчо фиг. 1 содержит первую секцию из четырех зубцов 7. расположенных под углом 90е один к другому, и вторую секцию из четырех зубцов 8, расположенных аналогично первой секции, т. е. зубцы обеих секций расположены под углом 45° относительно друг друга. Ba.i 9 расположен на скользящих втулках, установленных в корпусе 10 (скользящие втулки не показаны), объект 11 регулирования, (носитель информации) имеет механический контакт с валом шагового двигателя. Полюсы зубчатого ротора ориентируются вдоль продольных осей возбужденных зубцов статора.
01
00 GO СО СО ОЭ
Датчики положения ротора выполнены из пьезоэлектрических тонких прямоугольных пластин 12 и 13, соответственно сопряженных с широкими гранями с одним из клювооб- разных зубцов первой и второй секций вдоль их продольной оси с возможностью восприятия изгибной деформации (фиг. 2) указанных зубцов от намагничивающей силы взаимодействия с ротором.
Съем аналогового сигнала с пьезоэлек- трических датчиков положения ротора (напряжения, возникающего за счет прямого пьезоэффекта) осуществляется с помощью выводных контактов 14 и 15, припаянных к электродам широких граней.
Переключающее устройство (блок 16) (фиг. 4) содержит электронные ключи 17- 20, триггеры 21-24, усилители 25-28 напряжения и формирователи 29-32 импульсов, число которых определяется числом фазных обмоток (на чертеже переключающее устройство показано для подключения обмо- гок 4-фазного шагового двигателя).
Выход каждого из триггеров соединен с управляющим входом соответствующего ключа, а сигнальный вход и сигнальный выход каждого из ключей подключены соответст- венно к выходу усилителя 33 мощности и электрическим выводом соответствующих управляющих обмоток шагового двигателя. Выходы каждого из формирователей импульсов соединены с соответствующими входами (установочными) соседних триггеров, а вхо- ды указанных формирователей подключены к выходам усилителей напряжения, входы которых подключены к электродам пьезоэлектрических датчиков положения ротора соответствующей управляющей обмотки шагового двигателя.
Выходы каждого из усилителей напряжения переключающего устройства подключены к входу детектирующего элемента 34, выход которого подсоединен к управляющему входу усилителя мощности соответстсвую- щей управляющей обмотки статора.
Пьезоэлектромагнитный шаговый двигатель работает следующим образом.
Запуск шагового двигателя осуществляется кнопкой «Пуск, при этом срабатывают элементы переключающего устройства 16, триггер 21 опрокидывается и открывает электронный ключ 17, в результате напряжение с выхода усилителя 33 мощности (источник постоянного напряжения), поступает на обмотку 4 управления катушки 2 и одновременно на другую обмотку управления второй ка,тушки (на фиг. 1 обмотка второй катушки не показана). Это приводит к возбуждению первой секции, состоящей из четырех клювообразных зубцов 7, расположенных один относительно другого через 90°.
Полюсы ротора 5 ориентируются вдоль осей возбужденных зубцов. При этом ротор 5 поворачивается на некоторый угол в сторону возбужденной секции зубцов 7, равный междузубцовому расстоянию, занимает фиксированное положение, соответствующее наибол г шей магнитной проводимости пути замыкания магнитного потока статора 1 для данной возбужденной фазы обмотки 4 катушки 2. Указанный поворот ротора (по мере приближения полюсов ротора к возбужденной секции зубцов 7 с пьезопластиной 12) приводит к изгибной деформации указанного зубца данной секции, на котором установлен датчик 12 положения ротора 5 в радиальном направлении (фиг. 2).
Величина допустимой деформации изгиба определяется по формуле
Ациг ме/КжЕ,
где Wc - магнитодвижуа1ая сила управляющей обмотки статора на пару полюсов, Н; K,,f , - суммарная изгибная жесткость клювообразного зубца Дуд и пьезо пластины /Ь,.Н/м.
В результате изгибной деформации на электродах 14 пьезопластины 12 датчика положения ротора, при угловом повороте ротора на шаг, формируется импульс за счет прямого пьезоэффекта, изменяющийся пропорционально (амплитуде деформации пьезо датчика) изменению механической нагрузки FHH на валу 9 ротора 5 шагового двигателя. Этот сигнал после усиления в блоке 25 и детектировании в блоке 34 поступает на управляющий вход усилителя 33 мощности, изменяя его коэффициент передачи по закону изменения нагрузки FHH.
После углового поворота ротор 5 занимает новое фиксированное положение, при котором выработанный импульс самокоммутации после формирования в блоке 29, воздействуя на второй вход триггера 21, закрывает электронный ключ 17, отключает напряжение питания управляющей обмотки 4 первой секции зубцов статора и одновременно опрокидывает триггер 22, открывая электронный ключ 18, подавая питающее напряжение на управляющую обмотку 3 второй секции зубцов 8 статора. В описанной последовательности циклы периодически повторяются, осуществляя переключение напряжения питания на обмотках управления. Совмещение пьезоэлектрического датчика без увеличения габаритных размеров шагового двигателя обеспечивает выдачу информации о положении ротора на каждом шаге угла поворота, исключает необходимость использования самокоммутирующего диска с прорезями.
Формула изобретения
Пьезоэлектромагнитный шаговый двигатель для перемещения носителя информации, содержащий статор из двух идентичных частей с катушками управляющих обмоток и клювообразными зубцами, широкие грани которых обращены к многополюсному зубчатому ротору в продольном направлении, усилитель мощности, к входу которого подключено переключающее устройство, а к выходу - обмотки катушек статора, датчик шагов ротора, соединенный с входом переключающего устройства, и детектирующий элемент, отличающийся тем, что, с целью уменьшения неравномерности и повышения скорости углового поворота ротора, каждая часть статора снабжена датчиками положе
ния ротора, выполненными в вн;,е пьезоэлектрических пластин, жестко сопряженных с широкими гранями клювообразных зубцов вдоль их продольной оси, при этом пьезоэлектрические датчики положения ротора установлены на одном из зубцов секции соответствующей управляющей обмотки катуше, статора, а усилительные выходы переключающего устройства подключены к соответствующим входам детектирующего элемента, выход которого соединен с управляющим входом усилителя мощности соответствующей управляющей обмотки статора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым двигателем | 1974 |
|
SU552913A3 |
| ИНДУКТОРНЫЙ ГЕНЕРАТОР С СОВМЕЩЕННЫМИ ОБМОТКАМИ ВОЗБУЖДЕНИЯ И СТАТОРА | 2019 |
|
RU2702615C1 |
| Нереверсивный шаговый двигатель | 1977 |
|
SU817898A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С ЭЛЕКТРОННОЙ КОММУТАЦИЕЙ | 1994 |
|
RU2096906C1 |
| Способ перевозбуждения гистерезисного электродвигателя | 1988 |
|
SU1647838A1 |
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 1994 |
|
RU2079951C1 |
| Способ управления шаговым двигателем | 1989 |
|
SU1723653A1 |
| СОВМЕЩЕННЫЙ ВЕНТИЛЬНЫЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2309517C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПЕРЕКЛЮЧАЕМЫМИ ФАЗНЫМИ ОБМОТКАМИ | 2018 |
|
RU2698464C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ГИБРИДНЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2405241C2 |
Изобретение относится к области приборостроения, к механизмам перемещения носителя информации и может быть использовано в приводах автоматики и робототехники. Целью изобретения является уменьшение неравномерности перемещения и повышение скорости углового поворота ротора на шаг в дискретном режиме. В шаговом двигателе каждая часть статора снабжена датчиками положения ротора, выполненными из пьезоэлектрических пластин, жестко сопряженных с широкими гранями клювообразных зубцов вдоль их продольной оси с возможностью восприятия изгибной деформации указанных зубцов от намагничивающей силы взаимодействия с ротором. При этом пьезоэлектрические датчики положения ротора установлены на одном из зубцов секции соответствующей управляющей обмотки катушек статора, а выход усилителей напряжения переключающего устройства подключен к входу детектирующего элемента, выход которого подсоединен к управляющему входу усилителя мощности соответствующей управляющей обмотки статора. 4 ил.
10
щ к
в
Фиг.2
А-А
Фиг.З
