1
Изобретение относится к электромашиностроению и может быть использовано в приводах, требующих совмеще ния перемещения подвижного элемента в аксиальном направлении с его вращением вокруг продольной оси двигателя при необходимости достижения плавного регулирования скорости винтового движения в широком диапазоне и необходимости получения точного останова рабочего органа. Одной из важных областей применения изобретения является электропривод промышленных роботов и манипуляторов, где требуется сочетание поступательного и вращательного движений и достижение точного позиционирования.
Известны асинхронные и реактивные шаговые двигатели, даю1чие возможность получить винтовое двихсение подвижного элемента за счет особой конструкции статора и ротора двигателя.
В таких двигателях статор, несущий многофазную обмотку, имеет форму цилиндра, на внутренней поверхности которого нарезана двухходовая винтовая резьба. Ротор двигателя выполнен в виде цилиндра из ферромаг нитного материала -с кольцевой нарезкой, шаг которой равен тагу винтовой резьбы статора.
Многофазная обмотка, уложенная в пазах статора, создает в машине вращающееся поле. При этом полюса, образукядиеся на статоре, благодаря винтовой резьбе на его внутренней поверхности перемещаются в аксиальном направлении. Ротор перемещается синх10ронно с перемещением полюсов статора на величину двойного шага винта за Один оборот вращающегося поля, обеспечивая прецизионное линейное перемещение 1.
15
Известен также электрический двигатель с винтообразным статором, в пазах которого уложена рабочая обмотка, и ротором. Этот двигатель также обеспечивает винтовое движение
20 ротора 2 .
Недостатком известного двигателя является невозможность достижения значительных диапазонов плавного регулирования скорости.
25
Цель изобретения - расширение диапазона регулирования скорости.
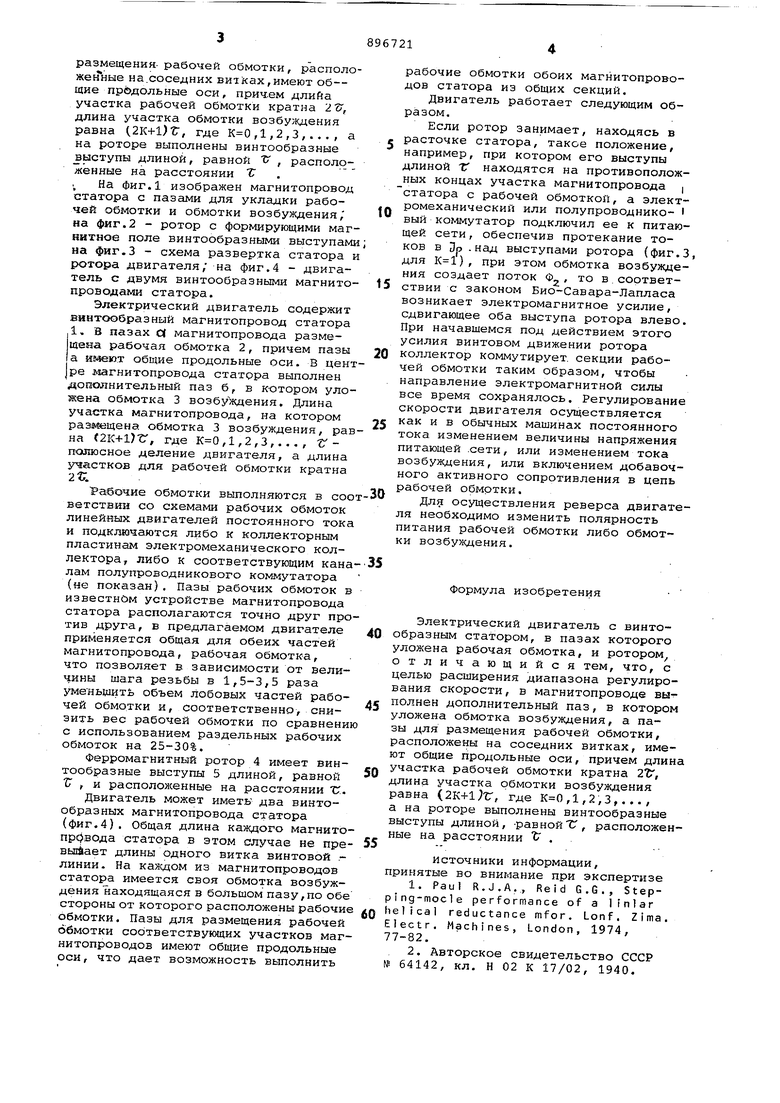
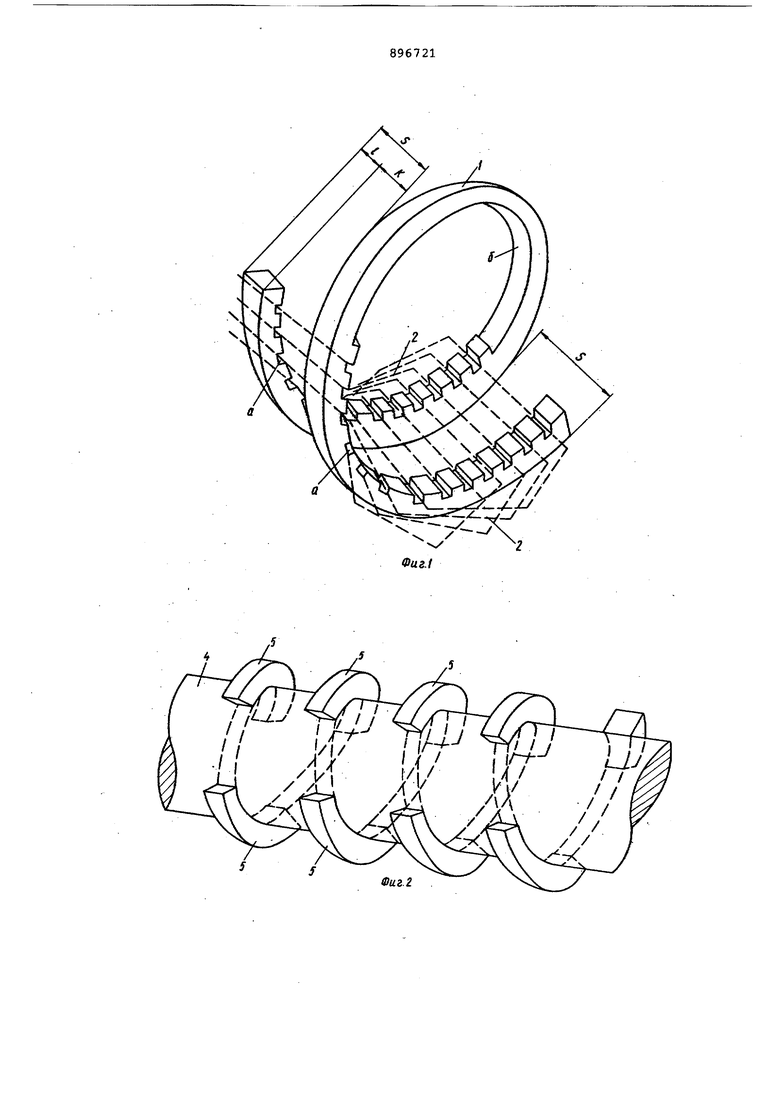
Поставленная, цель достигается тем, что в магнитопроводе выполнен дополнительный паз, в котором уложе30на обмотка возбуждения, а пазы для размещения- рабочей обмотки, расположенные на.соседних витках,имеют об- щие продольные оси, прич.ем длийа участка рабочей обмотки кратна 2 Ъ, длина участка обмотки возбу5Кдения равна (2К+1)гг, где ,1,2 ,3 ,... , а на роторе выполнены винтообразные выступы длиной, равной tx , расположенные на расстоянии t На фиг.1 изображен магнитопровод статора с пазами для укладки рабочей обмотки и обмотки возбуждения, на фиг.2 - ротор с формируняцими магнитное поле винтообразными выступами на фиг.З - схема развертка статора и ротора двигателя/ на фиг.4 - двигатель с двумя винтообразными магнитопроводами статора. Электрический двигатель содержит винтообразный магнитопровод статора 1, В пазах ot магнитопровода размещена рабочая обмотка 2, причем пазы а имеют общие продольные оси. В цент ре магнитопровода статора выполнен дополнительный паз б, в котором уложена обмотка 3 возбуждения. Длина участка магнитопровода, на котором размещена обмотка 3 возбуждения, рав на «2К+1)гГ, где ,1,2,3,. . . , fполюсное деление двигателя, а длина участков для рабочей обмотки кратна Рабочие обмотки выполняются в соо ветствйн со схемами рабочих обмоток линейных двигателей постоянного тока и подключаются либо к коллекторным пластинам электромеханического коллектора, либо к соответствующим кана лам полупроводникового коммутатора (не показан). Пазы рабочих обмоток в известном устройстве магнитопровода статора располагаются точно друг про тив друга, в предлагаемом двигателе применяется общая для обеих частей магнитопровода, рабочая обмотка, что позволяет в зависимости от величины шага резьбы в 1,5-3,5 раза уменыиить объем лобовых частей рабочей обмотки и, соответственно, снизить вес рабочей обмотки по сравнени с использованием раздельных рабочих обмоток на 25-30%. Ферромагнитный ротор 4 имеет винтообразные выступы 5 длиной, равной tr , и распололсенные на расстоянии С Двигатель может иметь два винтообразных магнитопровода статора (фиг.4). Общая длина каждого магнито прОвода статора в этом случае не пре выйает длины одного нитка винтовой .линии. На каяадом из магнитопроводов статора имеется своя обмотка возбуждения находящаяся в большом пазу,по об стороны от которого расположены рабочи обмотки. Пазы для размещения рабочей обмотки соответствующих участков маг нитопроводов имеют общие продольные оси, что дает возможность выполнить рабочие обмотки обоих магнитопроводов статора из общих секций. Двигатель работает следующим образом. Если ротор занимает, находясь в расточке статора, такое положение, например, при котором его выступы длиной Т находятся на противоположных концах участка магнитопровода | статора с рабочей обмоткой, а электромеханический или полупроводнике- I вый коммутатор подключил ее к питающей сети, обеспечив протекание токов в Зр .над выступами ротора (фиг.З, для ), при этом обмотка возбуждения создает поток Ф, . то в соответствии с законом Био-Савара-Лапласа возникает электромагнитное усилие, сдвигающее оба выступа ротора влево. При начавшемся под действием этого усилия винтовом движении ротора коллектор коммутирует, секции рабочей обмотки таким образом, чтобы направление электромагнитной силы все время сохранялось. Регулирование скорости двигателя осуществляется как и в обычных машинах постоянного тока изменением величины напряжения питающей .сети, или изменением тока возбуждения, или включением добавочного активного сопротивления в цепь рабочей обмотки. Дл9 осуществления реверса двигателя необходимо изменить полярность питания рабочей обмотки либо обмотки возбуждения. Формула изобретения Электрический двигатель с винтообразным статором, в пазах которого уложена рабочая обмотка, и ротором отличающийся тем, что, с целью расширения диапазона регулирования скорости, в магнитопроводе выполнев дополнительный паз, в котором уложена обмотка возбуждения, а пазы для размещения рабочей обмотки, расположены на соседних витках, имеют общие продольные оси, причем длина участка рабочей обмотки кратна 2ZJ, длина участка обмотки возбуждения равна (2К+1РгГ, где ,1,2,3,. .. , а на роторе выполнены винтообразные выступы длиной, -равной С, расположенные на расстоянии . источники информации, принятые во внимание при экспертизе 1.Paul R.J.A,, Reid G.G., Stepping-mocle performance of a linlar helical reductance mfor. Lonf. Zima. Electr. Machines, London, 1974, 77-82. 2.Авторское свидетельство СССР № 64142, кл. Н 02 К 17/02, 1940.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрический двигатель постоянного тока | 1979 |
|
SU919023A1 |
| Электродвигатель постоянного тока | 1980 |
|
SU928554A1 |
| Электрический двигатель постоянного тока | 1980 |
|
SU985894A1 |
| Электрический двигатель | 1978 |
|
SU890527A1 |
| Преобразователь перемещения | 1978 |
|
SU781540A1 |
| Электрический двигатель | 1981 |
|
SU983928A1 |
| ИНДУКТОРНЫЙ СВАРОЧНЫЙ ГЕНЕРАТОР | 2009 |
|
RU2430817C2 |
| БЕСКОНТАКТНАЯ ИНДУКТОРНАЯ ВЕНТИЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2004 |
|
RU2277284C2 |
| Преобразователь перемещения | 1981 |
|
SU989313A1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПЕРЕМЕЩАЮЩЕГОСЯ МАГНИТНОГО ПОЛЯ (ВАРИАНТЫ) | 2005 |
|
RU2314625C2 |
2Г
