1
Изобретение относится к горному делу, а именно к способам -контроля курсовой ориентации горнопроходческих машин бурового типа в углепородном горном массиве любой крепости и устойчивости при подготовке участков горных работ, и в особенности, для осуществления нетрадиционных способов добычи угля.
Известен способ контроля отклонения от заданного курса движения непрерывно работающего штрекопроходческого комбайна, заключающийся в задании базовой системы отсчета отвесами теодолитного хода с одновременно его фиксацией в пространстве горного массива лазерным лучем и подвижной системы отсчета указателем курса, например гирокомпасом, связанным с продольной осью машины, измерении углового положения подвижной системы отсчета (угла наклона и курсового угла щтрекопроходческого комбайиа) относительно базовой системы отсчета и сравнении его с заданным значением 1.
Указанный способ позволяет с высокой точностью контролировать курсовую ориентацию горнопроходческой машины при проходке полевых выработок в весьма крепком
И устойчивом породном массиве при значительной трудоемкости и высокой квалификации маркшейдерских работ.
Однако указанный способ не обеспечивает требуемой технологической точности контроля при проходке выработок в углепородном массиве, расположенном в зонах опорных давлений, и в частности, при подготовке участков горных работ для осуществления нетрадиционных способов добычи угля путем проведения системы подготовительных выработок из-за накопления ошибок в задании направления теодолитного хода, связанная с чрезмерными смещениями присекаемых пород.
Наиболее близким по технической сущности к предлагаемому является способ контроля курсовой ориентации горнопроходческой машины бурового типа, заключающийся в задании базовой и подвижной систем отсчета соответственно углами между геомагнитным меридианом и продольной осью мащины в устье выработки и в текущих точках трассы ее проходки путем измерения напряженностей горизонтальной составляющей геомагнитного поля в устье выработки ив текущих точках трассы ее проходки магнитометром, связанным с продольной осью машины, сравнении измеренных напряженностей по алгебраической величине, отклонения которых судят об величине и направлении углового отклонения трассы движения машины относительно заданного курса проходки 2.
Известный способ обеспечивает заданную технологическую точность контроля курсовой ориентации горнопроходческих машин бурового типа при проходке выработок в углепородном горном массиве различной степени устойчивости и крепости последнего и при отсутствии вариаций напряженности геомагнитного поля. Однако при их наличии осуществлением известного способа невозможно обеспечить требуемую точность контроля из-за дискретного задания базовой системы отсчета путем измерения напряженности горизонтальной составляющей геомагнитного поля в момент забуривания проводимой выработки.
Согласно исследованиям величина только солнечно-суточных вариаций напряженности геомагнитного поля для средних широт в среднем составляет 20-30 гамм. Причем зимой солнечно-суточные вариации напряженности геомагнитного поля в четыре раза меньше, чем летом. Лунно-суточиые вариации напряженности геомагнитного поля составляют примерно 10-15% величины солнечно-суточных вариаций. Средние величины же вариаций напряженности геомагнитного поля согласно указанным исследованиям на порядок выше солнечио-суточнь1х вариаций при магнитных бурях, длительность которых изменяется от нескольких часов до нескольких дней.
Цель изобретения - повышение точности измерений путем устранения влияния вариаций напряженности геомагнитного поля, а также унификация измерений по заданию базовой системы отсчета при одновременной проходке нескольких выработок, обусловленной подготовкой участка горных работ.
Эта цель достигается тем, что задание базовой и подвижной систем отсчета осуществляют одновременно, при этом измерение напряженност,ей горизонтальной составляющей геомагнитного поля осуществляют независимо и непрерывно двумя магнитометрами, один из которых соответственно установлен в устье выработки, а другой - вдоль продольной оси мащины.
Кроме того, при одновременной проходке нескольких выработок, обусловленных подготовкой участка горных работ, измерение наг.т/яженности горизонтальной составляющее геомагнитного поля для задания базовой чстемы отчета осуществляют магнитометром, установленным в одной из точек подготавливаемого участка горных работ.
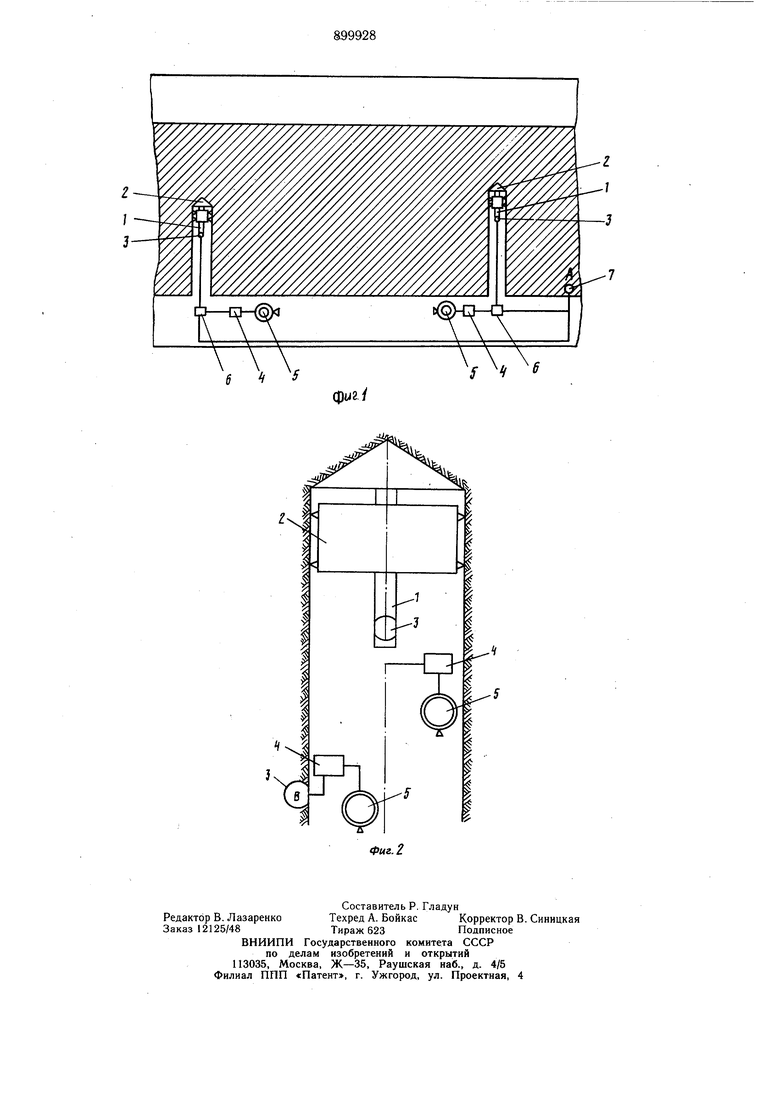
На фиг. 1 представлена блок-схема устройств магнитометров для осуществления
способа и технологическая схема их установки при одновременной проходке нескольких выработок для подготовки участка горных работ при реализации нетрадиционных способов добычи угля; на фиг. 2 - то же, при проходке одиночной выработки.
В качестве устройств.магнитометров для осуществления способа могут быть применены серийно выпускаемые отечественной авиационной промышленностью индукционные магнитные компасы ГИК-1 без какихлибо конструктивных изменений (фиг. 2).
Индукционные магнитные компасы ГИК1конструктивно состоят из закрепленных в немагнитных конструкциях 1 машины 2 индукционных датчиков 3 {ИД-2) и коррекционных механизмов 4, снабженных шкалами 5. Для осуществления способа по фиг. 1 необходимо индуктивные компасы ГИК-1 снабдить звеньями б сравнения (сумматорами), один из входов которых связан с магнитометром 7 (индукционным датчиком
0 ИД-2).
Способ контроля курсовой ориентации горнопроходческой машины бурового типа осуществляется следующим образом.
Перед забуриванием проводимых выработок датчики 3 (например, ИД-2, фиг. 2, точка В устья выработки) и 7 (фиг. 1, одна из точек участка горных работ, например А) индукционных магнитных компасов ГИК-1 (магнитометров), задающих базовые системы отсчета, устанавливают путем углубления их в массив на расстояние от стенки выработки, определяемое отсутствием влияния ферромагнитных масс, находящихся в выработке, на проводимые измерения напряженности горизонтальной составляющей геомагнитного поля, связанные с заданием ба зовых систем отсчета. Одновременно с этим закрепляют датчики 3 (например, КД-2) магнитометров (индукционных магнитных компасов ГИК-1), задающих подвижную систему отсчета, на горнопроходческой ма0 щине 2 бурового типа в немагнитных конструкциях 1 (например, изготовленных из нержавеющей стали), установленных вдоль продольной оси мащины. Контроль курсовой ориентации горнопроходческой машины
2производится с момента углубления послед ней в массив на глубину, равную расстоянию,
определяемому отсутствием влияния ферромагнитных масс, на измерения, проводимые с целью задания подвижной системы отсчета.
o Контроль курсовой ориентации горнопроходческой мащины 2 бурового типа производится в следующей последовательности. По достижению глубиной проходимой выработки расстояния, определяемого отсутствием влияния ферромагнитных масс в устье
выработки на результаты измерений, сигналы, пропорциональные величине напряженности горизонтальной составляющей геомагнитною поля с датчиков 3 соответственно закрепленных в немагнитной конструкции 1 горнопроходческой машины 2 и в устье выработки (фиг. 2, точка В), поступают на коррекционные механизмы 4 магнитометров (индукционных магнитных компасов ГИК 1), задающих базовую и подвижную системы отсчета, которые отрабатывают величину текущего углового положения последних относительно геомагнитного меридиана, т.е. углов соответственно между геомагнитным меридианом и заданным курсом проходки в устье выработки и продольной осью мащинь в текущих точках трассы ее проходки, знак и численные градусные значения которых определяются по щкалам 5 коррекционных механизмов 4. Полученные при этом значения измеренных углов, задающих соответственно базовую и подвижную системы отсчета, сравниваются оператором, управляющим работой горнопроходческой мащины 2 по наличию рассогласования которых последним подается команда управления на механизм управления направлением движения машины для устранения возникшего отклонения. По достижению глубиной проходимых одновременно нескольких вь1работок из коренной выработки (фиг. 1, точка А) расстояния, определяемого отсутствием влияния ферромагнитных масс, расположенных в коренной выработке подготавливаемого участка горных работ для осуществления, например, нетрадиционных способов подземной добычи угля, сигнал с датчика 7 магнитометра, задающего базовую систему отсчета, установленного в одной из точек участка горных работ, например в точке А (фиг. 2), поступает на входы узлов сравнения (сумматоров) 6 магнитометров (индукционных магнитных компасов), задающих подвижные системы отсчета одновременно движущихся горнопроходческих машин 2. На вторые входы узлов сравнения (сумматоров) 6 одновременно с поступлением сигнала, задающего базовую систему отсчета, поступают сигналы с датчиков 3, закрепленных в немагнитных конструкциях 1 горнопроходчеких машин 2, задающие подвижную систему отсчета. С выходов узлов сравнения (сумматоров) 6 поступает сигнал рассогласования на коррекционные механизмы 4, в которых отрабатьгеается знак и величина углового отклонения трассы проходимой выработки относительно заданного курса проходки, фиксируемьге щкалами 5 при дистанционном ручном управлении направлением движения горнопроходческой машины 2. При автоматическом управлении направлением движения горнопроходческой мащины 2 указанный сигнал рассогласования поступает на следящую систему механизма управления направления движения. Задание базовой системы отсчета в процессе проходки выработки путем непрерывных измерений напряженности горизонтальной составляющей геомагнитного поля магнитометром, связанным с устьем выработки, или путем непрерывных круглосуточных измерений последней магнитометром, установленным в одной из точек подготавливаемого участка горных работ, позволит повысить точность измерений путем устранения влияния вариаций напряженности геомагнитного поля, а также унифицировать измерения по заданию базовой системы отсчета при одновременной проходке нескольких выработок, обусловленных подготовкой участка горных работ. Расчеты показывают, что внедрение предлагаемого способа контроля курсовой ориентации горнопроходческих машин бурового типа только на одной из щахт Центрального района Донбасса позволит получить годовой экономический эффект в размере не менее 15000 руб. Формула изобретения Способ контроля курсовой ориентации горнопроходческой мащины бурового типа, включающий задание базовой и подвижной систем отсчета соответственно углами между геомагнитным меридианом и продольной осью мащинь в устье выработки и в текущих точках трассы ее проходки путем измерения напряженностей горизонтальной составляющей геомагнитного поля в устье выработки и в текущих точках трассы ее проходки магнитометром, связанным с продольной осью мащины, сравнение измеренных напряженностей по алгебраической величине отклонения которых судят об величине и направлении углового отклонения трассы движения мащины относительно заданного курса проходки, отличающийся тем, что, с целью повыщения точности измерений путем устранения влияния вариаций напряженности геомагнитного поля, задание базовой и подвижной систем отсчета осуществляют одновременно, при этом измерение напряженностей горизонтальной составляющей геомагнитного поля осуществляют независимо и непрерывно двумя магнитометрами, один из которых соответственно установлен в устье выработки, а другой - вдоль продольной оси мащины. 2. Способ по. п. 1, отличающийся тем, что при одновременной проходке нескольких выработок, обусловленных подготовкой участка горных работ, измерение напряженности горизонтальной составляющей геомагнитногоо поля для задания базовой системы отсчета осуществляют магнитом етром, установленным в одной из точек подготавливаемого участка горных работ. Источники информации, принятые во внимание при экспертизе 1: Заявка ФРГ № 1274056, кл. Е 21 С 27/24, опублик. 1968. 2. Патент Англии № 1342475, кл. G 01 В 7/30, опублик. 1974.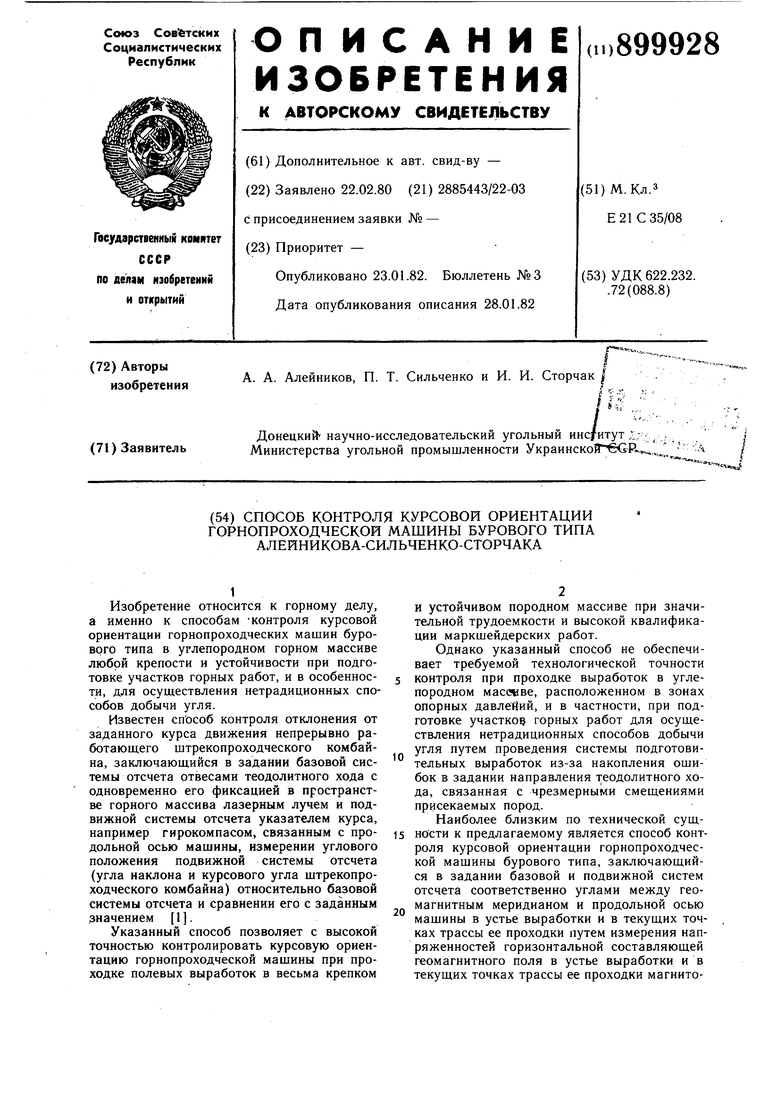
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИЯ СКЛОНЕНИЯ ПРИ СЕЙСМИЧЕСКИХ РАЗВЕДКАХ | 2012 |
|
RU2557361C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2022 |
|
RU2796372C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| ГОРНОПРОХОДЧЕСКИЙ ДОБЫЧНОЙ БЛОК (МОДУЛЬ) | 2013 |
|
RU2528350C2 |
| Устройство для автоматического управления положением горнопроходческой машины в плане и профиле пласта | 1978 |
|
SU754060A1 |
| Способ подготовки угольных пластов, склонных к газодинамическим явлениям | 1990 |
|
SU1709114A1 |
| СИСТЕМА ГОРНОПРОХОДЧЕСКИХ МАШИН | 1997 |
|
RU2144139C1 |
| СИСТЕМА ГОРНОПРОХОДЧЕСКИХ МАШИН | 1998 |
|
RU2148715C1 |
| СПОСОБ ОБНОВЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ, ОСНОВАННЫЙ НА ДЕВЯТИОСЕВОМ ДАТЧИКЕ НА ОСНОВЕ МЭМС | 2016 |
|
RU2662460C1 |
| Способ отработки блоков | 1990 |
|
SU1765402A1 |