(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ПОЛОЖЕНИЕМ ГОРНОПРОХОДЧЕСКОЙ МАШИНЫ
В ПЛАНЕ И ПРОФИЛЕ ПЛАСТА
I
Изобретение относится к горной промышленности, а именно к устройствам автоматического управления горными машинами, например, горнопроходческими машинами.
Известны устройства, для контроля положения горнопроходческой машины, содержаш,ие оптический задатчик направления, полудисковый модулятор и фотоприемное устройство с объективом {1,2.
Эти устройства не обеспечивают требуемой точности контроля при крене машины и не применимы при проведении выработок с заданными уклоном и высотой подрывки.
Известно также устройство для автоматического контроля положением горнопроходческой машины в плане и профиле пласта, содержащее оптический задатчик направления, например, лазер, матрицу с фотоэлементами, усилители, блок управления приводом, привод, датчик измерения перемещений, управляющий и индикаторный блоки, исполнительные механизмы 3.
Это устройство может быть применено при проходке тоннелей, полевых штреков, квершлагов, а также штреков в мощных пластах. При проходке же горных выработок по смешанному забою, где необходимо соблюдать заданный уклон выработки и высоту подрывки, известное устройство не может быть использовано, так как имеющиеся средства контроля положения комбайна не обеспечивают в этих условиях требуемой точнос5 ти и надежности управления.
Цель изобретения - повысить точность и надежность управления при проведении горных выработок по смешанному забою с подрывкой породы.
Эта цель достигается тем, что устройство снабжено полупрозрачным уголковым зеркалом, анализатором, дополнительными фотоэлементами, сумматорами, блоком логики и блоком управления,лучом, подключенным к выходу блока логики, ко входам которого через усилители и сумматоры под15ключены дополнительные фотоэлементы, перед двумя из которых закреплен анализатор. При этом анализатор выполнен из двух половин поляроидной пленки, главные плоскости поляризации которых развернуты под
20 углом друг к другу.
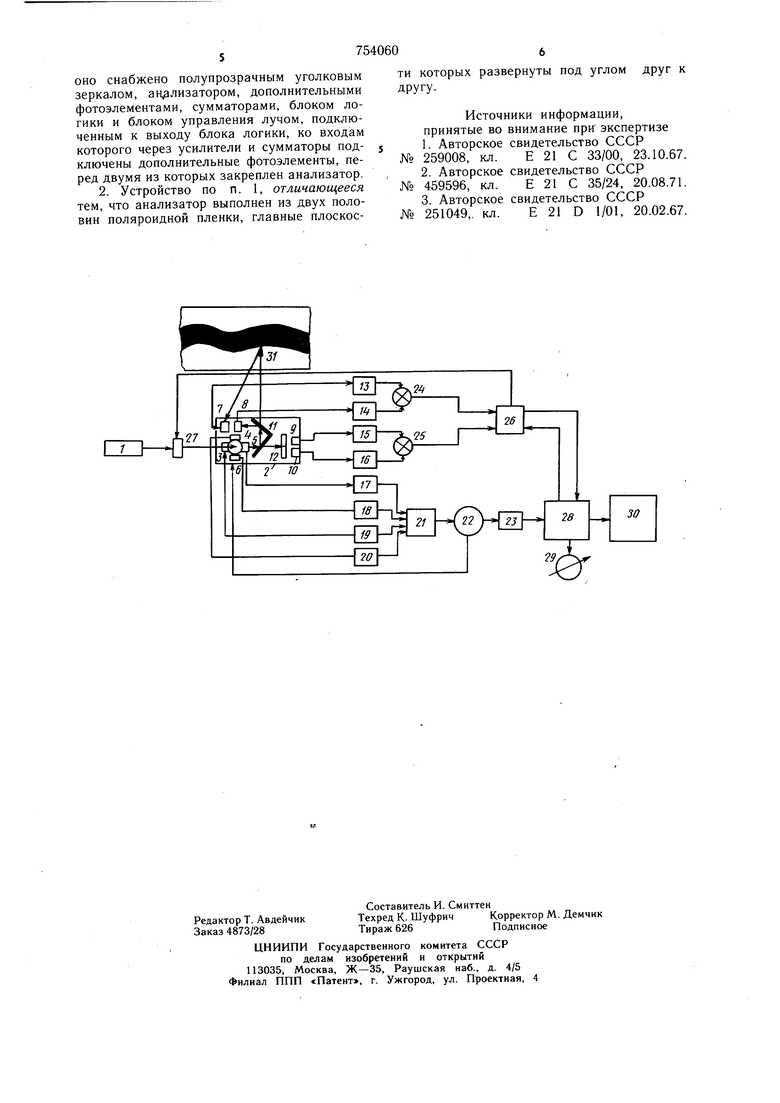
На чертеже приведена блок-схема устройства, поясняющая сущность изобретения. Устройство состоит из задатчика направления- лазера 1, матрицы 2 с фотоэлеме 1тами 3, 4, 5, 6, 7, 8, 9, 10, полупрозрачного уголкового зеркала 11 и анализатора 12, усилителей 13, 14, 15, 16, 17, 18, 19, 20, блока 21 управления приводом, привода 22, датчика измерения перемещений 23, сумматоров 24, 25, блока логики 26, блока управления лучом 27, управляющего блока 28, индикаторного блока 29 и исполнительных механизмов комбайна 30, Лазер 1 и блок управления 27 устанавливаются к выработке, а все остальные блокина горнопроходческой машине. С помощью луча лазера 1 задается нужное направление движения мащины. Слежение за лучом и изменение положения машины в профиле пласта осуществляется следящей измерительной системой, состоящей из фотоэлементов , усилителей 17-20, блока 21 управления приводом, привода 22, датчика измерения перемещений 23. Следящая система, при смещении горнопроходческой машины с заданного направления, удерживает матрицу 2-е фотоэлементами 3-6 в луче лазера. Величина смещения матрицы, а следовательно и машины, измеряется датчиком 23 и выдается в управляющий блок 2.8 . Горнопроходческая машина в процессе работы поворачивается относительно своей продольной оси (накреняется). Крен вносит ошибку в измерения положения машины в плане и профиле пласта. Измерение угла крена осуществляется с помощью поляризованного луча лазера, анализатора 12 и фотоэлементов 9 и 10. Величина светового потока, прошедшего через грань полупрозрачного уголкового зеркала 11 и анализатор 12 и падающего на фотоэлементы, зависит от величины и знака угла крена комбайна. В качестве анализатора 12 в данном устройстве используется поляроидная пленка, вырезанная в виде прямоугольника. Затем этот прямоугольник разрезан на две равные части (половины). Эти половины развернуты относительно друг друга на некоторый угол, например, на 90° и состыкованы. Таким образом получен анализатрр 12, состоящий из двух половин, развернутых так, что их главные плоскости поляризации образуют угол. Световой поток, проходя через одну половину, падает на фотоэлемент 9, а через другую половину - на фотоэлемент 10. Световой поток на одном из фотоэлементов 9, 10 увеличивается, а на другом - уменьшается. Сигналы, снимаемые с. фотоэлементов 9 и 10, усиливаются усилителями 15 и 16 и через сумматор 25 поступают в блок логики 26 и далее в управляющий блок 28. В управляющем блоке 28 происходит выработка управляющего воздействия, которое поступает на исполнительные механизмы 30 маШины и изменяет его положение в пространстве. Координаты положения машины в пространстве из управляющего блока 28 поступают в индикаторный блок 29, позволяющий мащинисту контролировать направление движения. При неспокойной гипсометрии пласта горнопроходческая машина может выйти из рабочей зоны лазерной системы. Чтобы этого не происходило, между лазером 1 и мащиной установлен блок управления лучом 27. В случае выхода луча из поля обзора, управляющий блок 28 через блок логики 26 выдает команду устройству управления лучом на поворот луча в плане. Блок управления лучом 27 представляет собой зеркальную призму, которая поворачивается относительно оси электромеханическим приводом, производя тем самым отклонение луча в горизонтальной плоскости. (Для управления лучом может быть использован оптический клиновый компенсатор, представляющий собой систему из двух вращающихся одинаковых оптических клиньев, заключенных в оправу и приводимых во вращение электромеханическим приводом). Для условий, когда горная выработка проводится по пласту полезного ископаемого и когда полезное ископаемое возможно отличить по цвету или по спектру отраженного светового сигнала, в устройстве применены фотоэлементы 7 и 8. Луч лазера 1, проходя через отверстие в центре матрицы 2, делится полупрозрачным уголковым зеркалом 11 и направляется на опорный фотоэлемент 8 и на границу между, например, углем и породой 31. Отраженный луч принимается фотоэлементом 7. Отраженный и опорный сигналы, снимаемые с фотоэлементов 7 и 8, усиливаются усилителями 13 и 14 и через сумматор 24 поступают в блок логики 26 и далее в управляющий блок 28. Они являются основными сигналами для управления комбайном в плане при изменении залегания пласта. Таким образом, измеряя отклонение относительно луча лазера и границы между пластом полезного ископаемого и породой с учетом крена, устройство осуществляет автоматическое управление горнопроходческой машиной. Применение устройства позволяет автоматизировать процесс управления движением горнопроходческих машин, что снизит непроизводительные затраты, улучшит условия и безопасность работы машиниста. Формула изобретения 1. Устройство для автоматического управления положением горнопроходческой машины с плане и профиле пласта, содержащее оптический задатчик направления, например лазер, матрицу с фотоэлементами, усилители, блок управления приводом, привод, датчик измерения перемещений, управляющий и индикаторный блоки, исполнительные механизмы, отличающееся тем, что, с целью повышения точности и надежности управления,
оно снабжено полупрозрачным уголковым зеркалом, ан ализатором, дополнительными фотоэлементами, сумматорами, блоком логики и блоком управления лучом, подключенным к выходу блока логики, ко входам которого через усилители и сумматоры подключены дополнительные фотоэлементы, перед двумя из которых закреплен анализатор. 2. Устройство по п. 1, отличающееся тем, что анализатор выполнен из двух половин поляроидной пленки, главные плоскости которых развернуты под углом друг к
другу.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
№ 259008, кл. Е 21 С 33/00, 23.10.67.
2.Авторское свидетельство СССР
№ 459596, кл. Е 21 С 35/24, 20.08.71.
3.Авторское свидетельство СССР
№ 251049,, кл. Е 21 D 1/01, 20.02.67.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
| Система автоматического управления движением коллекторного проходческого щита | 1988 |
|
SU1599537A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| Система управления движением проходческого щита | 1982 |
|
SU1073455A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГОЩИТА | 1979 |
|
SU825939A1 |
| Устройство управления горнопроходческими машинами по лазерному лучу | 1983 |
|
SU1171592A1 |
| СПОСОБ УПРАВЛЕНИЯ ЩИТОМ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2509892C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПЕРЕДВИЖЕНИЯ ЩИТА И ВОЗВЕДЕНИЯ КРЕПИ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА | 2001 |
|
RU2206751C1 |
| Устройство для контроля положения горнопроходческой машины | 1971 |
|
SU459596A1 |
| Устройство для контроля положения горно-проходческого комбайна относительно открытой границы "каменная соль-сильвинит | 1980 |
|
SU883416A1 |
3ff
