(54) ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД КОЗЛОВА А. А.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2200881C1 |
| ИСКУССТВЕННАЯ МЫШЦА | 2014 |
|
RU2598763C2 |
| Уровномер, содержащий поплавок с размещенной в нем катушкой | 1969 |
|
SU273460A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ПЕРЕМЕННОГО МАГНИТНОГО ПОЛЯ ЗАДАННОЙ НАПРЯЖЕННОСТИ | 1970 |
|
SU270876A1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| Уровнемер сыпучих материалов | 1981 |
|
SU972236A1 |
| Устройство для отбора проб дозирования и нагнетания сред "Бегущая волна" (его варианты) | 1984 |
|
SU1295270A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1764992A1 |
| ДВУХКАНАЛЬНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ | 2013 |
|
RU2553588C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1973 |
|
SU381809A1 |
1
Изобретение относится к машиностроению, а именно к устройствам преобразования электромагнитной энергии в механическую, и может быть использовано в конструкции различных манипуляторов., в качестве привода приближающегося по функциональным возможностям к живой мышце.
Наиболее близким к предлагаемому является электрогидравлический привод, содержащий заполненную рабочей жидкостью камеру с расположенным внутри последней ферромагнитным подвижным звеном и установленной вдоль камеры электрической обмоткой 1 .
Недостаток указанного привода - малое число степеней свободы обеспечиваемых им пространственных перемещений, обусловленное наличием в его конструкции жестких элементов - стенок камеры- и подвижного звена в виде твердого ферромагнитного вала.
Цель изобретения - увеличение числа степеней свободы пространственных перемещений.
Указанная цель достигается тем, что привод дополнительно снабжен, по крайней мере, еще одной камерой, при этом каждая камера выполнена с эластичными стенками.
2
заполнена в качестве рабочей жидкости жидким ферромагнетиком и снабжена, по меньщей мере, двумя электрическими обмотками, состоящими из последовательно включенных катущек индуктивности, поочередно расположенных вдоль камеры между катущками другой обмотки.
Увеличение числа степеней свободы перемещений привода обеспечивается заменой жестких конструктивных элементов - стенок камеры и твердого подвижного звена - соответственно гибкими стенками камеры и жидким подвижным ферромагнетиком, а также различным соединением нескольких камер в единую конструкцию.
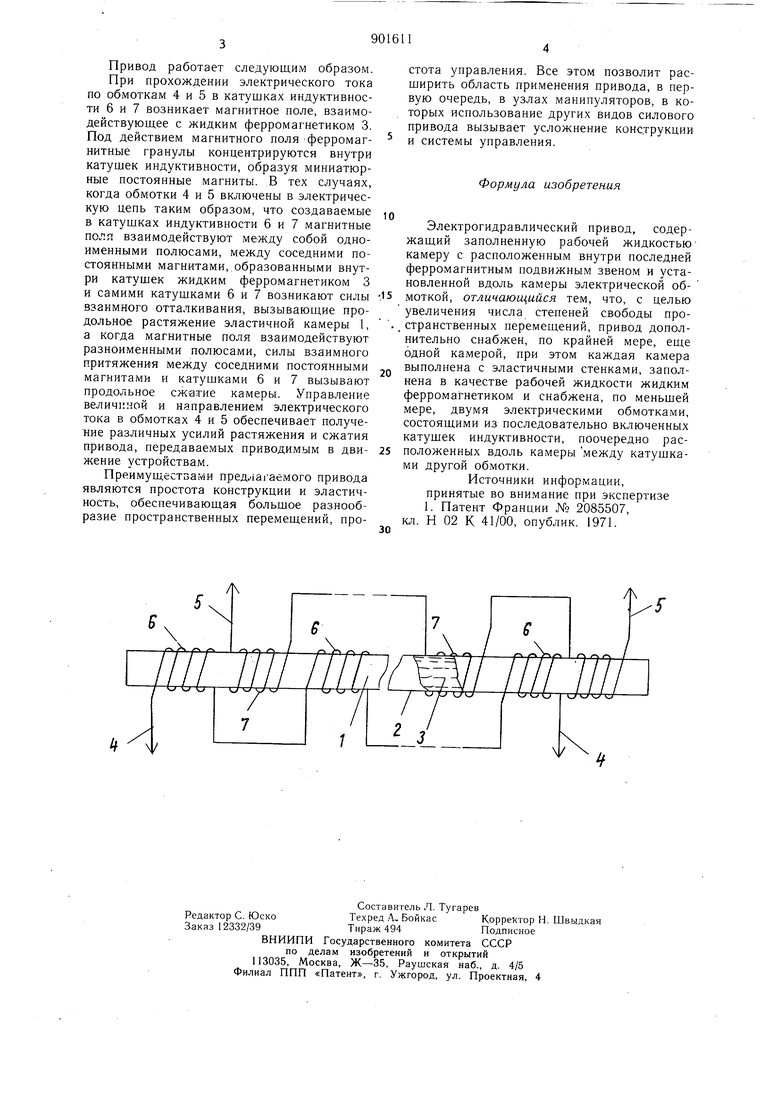
На чертеже представлена схема привода с одной камерой.
Привод содержит камеру 1 с эластичными стенками 2, заполненную жидким ферромагнетиком 3. Камера 1 снабжена двумя электрическими обмотками 4 и 5. Обмотка 4 состоит из последовательно включенных катущек 6 индуктивности, а обмотка 5 - 20 из последовательно включенных катущек 7 индуктивности. Катущки 6 обмотки 4 поочередно расположены вдоль камеры 1 между катущками 7 другой обмотки 5.
Привод работает следующим образом.
При прохождении электрического тока по обмоткам 4 и 5 в катушках индуктивности 6 и 7 возникает магнитное поле, взаимодействующее с жидким ферромагнетиком 3. Под действием магнитного поля ферромагнитные гранулы концентрируются внутри катушек индуктивности, образуя миниатюрные постоянные магниты. В тех случаях, когда обмотки 4 и 5 включены в электрическую цепь таким образом, что создаваемые в катушках индуктивности 6 и 7 магнитные поля взаимодействуют между собой одноименными полюсами, между соседними постоянными магнитами,,образованными внутри катушек жидким ферромагнетиком 3 и самими катущками 6 и 7 возникают силы взаимного отталкивания, вызывающие продольное растяжение эластичной камеры 1, а когда магнитные поля взаимодействуют разноименными полюсами, силы взаимного притяжения между соседними постоянными магнитами и катушками б и 7 вызывают продольное сжатие камеры. Управление величиной и направлением электрического тока в обмотках 4 и 5 обеспечивает получение различных усилий растяжения и сжатия привода, передаваемых приводимым в движение устройствам.
Преимуществами пpeдлaJaeмoгo привода являются простота конструкции и эластичность, обеспечивающая большое разнообразие пространственных перемещений, простота управления. Все этом позволит расширить область применения привода, в первую очередь, в узлах манипуляторов, в которых использование других видов силового привода вызывает усложнение конструкции и системы управления.
Формула изобретения
Электрогидравлический привод, содержащий заполненную рабочей жидкостью камеру с расположенным внутри последней ферромагнитным подвижным звеном и установленной вдоль камеры электрической об5 моткой, отличающийся тем, что, с целью увеличения числа степеней свободы про. странственных перемещений, привод дополнительно снабжен, по крайней мере, еще одной камерой, при этом каждая камера выполнена с эластичными стенками, заполнена в качестве рабочей жидкости жидким ферромагнетиком и снабжена, по меньшей мере, двумя электрическими обмотками, состоящими из последовательно включенных катушек индуктивности, поочередно расположенных вдоль камеры между катущками другой обмотки.
Источники информации, принятые во внимание при экспертизе 1. Патент Франции № 2085507,
кл. Н 02 К 41/00, опублик. 1971. 0
