Изобретение относится к машиностроению, в частности к конструкции исполнительных органов устройств, служащих для выполнения вспомогательных операций, связанных с изменением положения деталей в пространстве.
Известен схват манипулятора, содержащий губки, выполненные в виде установленного в корпусе эластичного баллона, заполненного рабочей средой, и средство для деформации, выполненное в виде дополнительного баллона, расположенного в корпусе и заполненного магнитной жидкостью.
Недостатком этого схвата является его сложность.
Наиболее близким по технической сущности к предлагаемому является схват манипулятора, содержащий корпус, электрическую обмотку, два эластичных баллона и камеру с жестким корпусом
Недостатком этого схвата манипулятора является его сложность
Цель изобретения - упрощение конструкции схвата.
Поставленная цель достигается тем, что в схвате манипулятора, содержащем корпус, выполненный из немагнитного материала, и электрическую обмотку с сердечником, выполненным в виде цилиндрического баллона из эластичного материала, заполненного рабочей средой с ферромагнитным наполнителем,корпус выполнен в виде стержня и расположен внутри упомянутого баллона соосно с ним, а обмотка управления выполнена в виде двух катушек, включенных встречно.
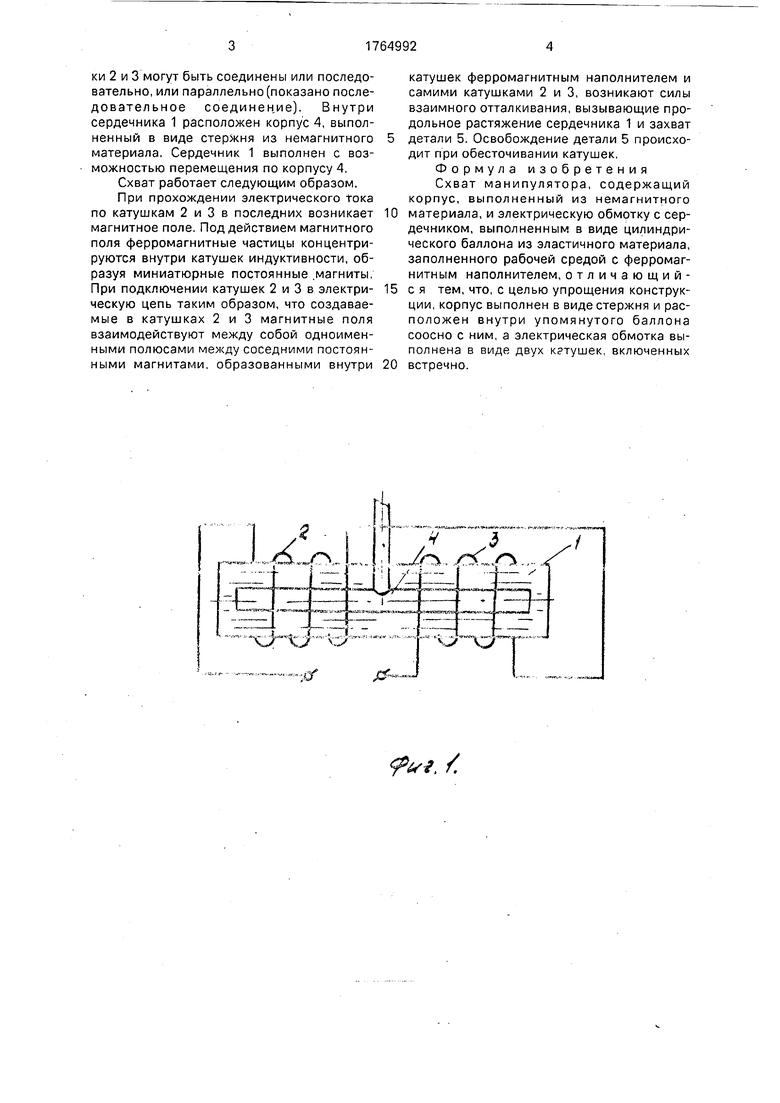
На фиг.1 изображен предлагаемый схват с обесточенной обмоткой; на фиг 2 - то же, с захваченной деталью.
Схват манипулятора содержит сердечник 1, выполненный в виде цилиндрического баллона, заполненного рабочей средой с ферромагнитным наполнителем Сердечник 1 может быть изготовлен также из магнито- проводной резины, например на основе каучука с ферритовым наполнителем. На сердечник 1 намотана электрическая обмотка управления, выполненная в виде двух катушек 2 и 3, включенных встречно Катушсо
С
vj
о
ю ю
го
ки 2 и 3 могут быть соединены или последовательно, или параллельно (показано после- довательное соединение). Внутри сердечника 1 расположен корпус 4, выполненный в виде стержня из немагнитного материала. Сердечник 1 выполнен с возможностью перемещения по корпусу 4.
Схват работает следующим образом.
При прохождении электрического Тока по катушкам 2 и 3 в последних возникает магнитное поле. Под действием магнитного поля ферромагнитные частицы концентрируются внутри катушек индуктивности, образуя миниатюрные постоянные .магниты. При подключении катушек 2 и 3 в электри- ческую цепь таким образом, что создаваемые в катушках 2 и 3 магнитные поля взаимодействуют между собой одноименными полюсами между соседними постоянными магнитами, образованными внутри
катушек ферромагнитным наполнителем и самими катушками 2 и 3, возникают силы взаимного отталкивания, вызывающие продольное растяжение сердечника 1 и захват детали 5. Освобождение детали 5 происходит при обесточивании катушек. Формула изобретения Схват манипулятора, содержащий корпус, выполненный из немагнитного материала, и электрическую обмотку с сердечником, выполненным в виде цилиндрического баллона из эластичного материала, заполненного рабочей средой с ферромагнитным наполнителем, отличающий- с я тем, что, с целью упрощения конструкции, корпус выполнен в виде стержня и расположен внутри упомянутого баллона соосно с ним, а электрическая обмотка выполнена в виде двух к тушек. включенных встречно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота В.Г.Вохмянина | 1990 |
|
SU1756144A1 |
| Электромагнитное захватное устройство | 1990 |
|
SU1745541A1 |
| Схват манипулятора В.Г.Вохмянина | 1988 |
|
SU1627402A1 |
| Захватное устройство | 1990 |
|
SU1775290A1 |
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1764991A1 |
| Схват манипулятора | 1985 |
|
SU1321583A1 |
| Схват манипулятора | 1991 |
|
SU1811479A3 |
| Схват манипулятора В.Г.Вохмянина | 1986 |
|
SU1366394A1 |
| Схват манипулятора | 1987 |
|
SU1509246A1 |
| Схват манипулятора | 1985 |
|
SU1276486A1 |
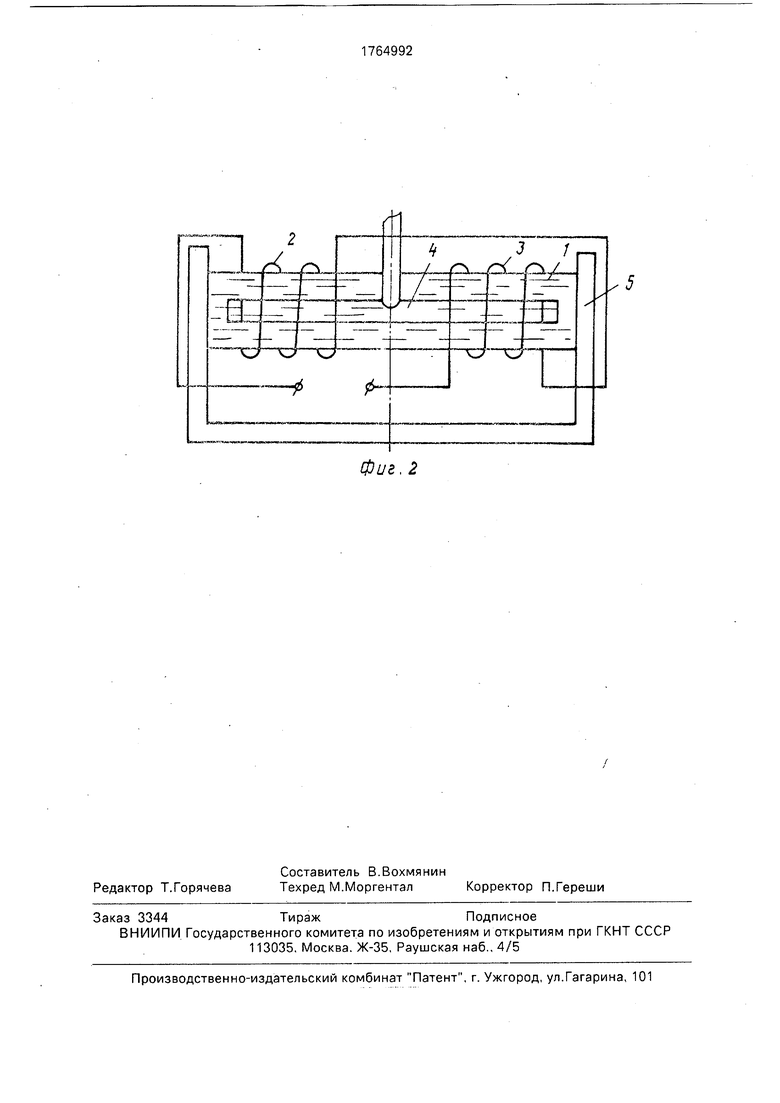
Использование: машиностроение, в захватных органах манипуляторов. Сущность изобретения: схват содержит корпус 4 из немагнитного материала и электрическую обмотку с сердечником 1. Сердечник выполнен в виде цилиндрического баллона из эластичного материала, заполненного рабочей средой с ферромагнитным наполнителем. При этом корпус выполнен в виде стержня и расположен внутри баллона соосно с ним, а электрическая обмотка - в виде двух катушек 2 и 3, включенных встречно. Для захвата детали 5 на обмотку подается питание. Под воздействием магнитных полей катушек 2 и 3 происходит продольное растяжение сердечника 1 и захват детали 5. 2 ил.
У $
гь, ,v J
Л
Фиг. 2
| Схват манипулятора В.Г.Вохмянина | 1988 |
|
SU1627402A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
