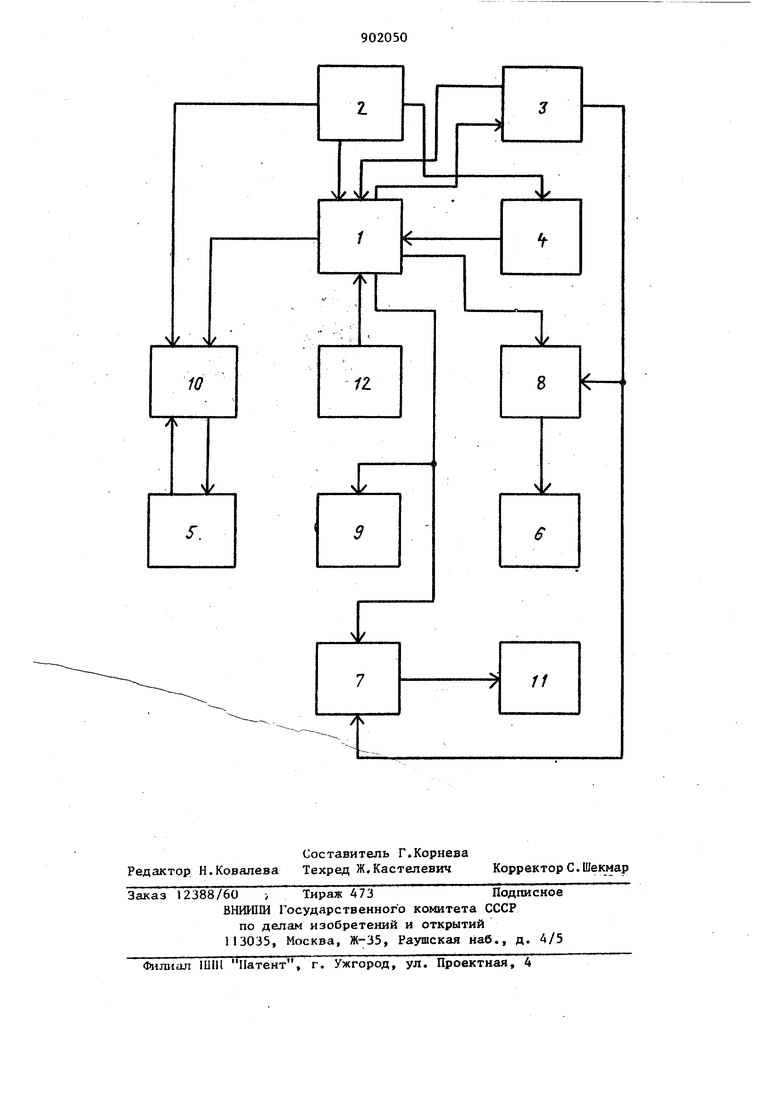
Изобретение относится к обучакнцим устройствам, в частности к устройствам для обучения судоводителей промыслу рыбы кошельковым неводом. Известен тренажер судоводителя промыслового судна, содержащий вычислительное устройство, ко входам которого подключены пульты инструктора и судоводителя, имитатор рельефа дна и промысловых объектов, и индикаторы длины вытравленного невода и гидролокатора П. Однако известный тренажер судоводителя может быть использован для обучения судоводителей управлению только разноглубинным тралом в вертикальной плоскости с поиском косяков рыбы гидролокатором в стороне от судна и не может быть использован для обучения навыкам кошелькового лова рыбы. Цель изобретения - расширение фун циональных возможностей путем обучения судоводителей промыслу рыбы кошельковым неводом с возможностью анализа действий судоводителей в процессе обучения. Поставленная цель достигается тем, что тренажер снабжен блоком вычисления длины вытравленного невода, подключенным входом к выходу вычислительного устройства, а выходом - к индикатору длины невода, имитатором гидролокационных. сигналов, связанным с выходами пульта инструктора и вычислительного устройства, подключенным входами к выходам вычислительного устройства и пульта судоводителя блоком изменения масштабов, и координатографами, один из которых подключен к выходу блока изменения масштаба, а другой - к выходу вычислительного устройства. На чертеже изображена функциональная схема тренажера. Тренажер включает вычислительное устройство 1, ко входам которого подключены пульты 2 и 3 инструктора
н судоводителя соответственно, имитатор 4 рельефа дна и промысловых объектов, индикатор 5 гидролокатора и индикатор 6 длины вытравленного невода.
К выходай устройства 1 подключены блок 7 изменения масштабов, бло 8 вычисле1шя длины вытравленного невода, координатограф 9 и имитатор 10 гидроакустических сигналов. К выходу блока 7 подключен второй координатограф 11, Ко входу устройства 1 подкл очен имитатор 12 повороно-выдвижного устройства гидролокатора.
Тренажер работает следующим образом.
Перед началом тренинга с пульта 2 инструктора задаются и вводятся в вычислительное устройство 1 условия решаемой задачи: курс, скорость и глубина залегания косяка, начальные координаты косяка и судна, направление и скорость дрейфа судна ypoBeiib шумов водной среды и поверхностной реверберации и т.п., а с пульта J судоводителя вводится в блок.8 вычисления длины вытравленного -невода длина кошелькового невода. Сигналы, соответствующие условиям задачи, поступают в иг-ш -атор 4 рельефа дна и промысловых объектов, имитатор 10 гидроакустических сигналов и вычислительное устройство 1. С пульта 3 судоводителя судоводитель-оператор управляет напралением движения судна и его скоростью. (Сигналы соответствующие углу разворота лопастей винта регулируемого шага (BPIII) и оборотам главного двигателя, углу и направлению перекладки пера руля поступают на вход вычислительного устройства 1. Но алгоритмам модели судна вычислительное устройство 1 вычисляет скрость и курс судна, которые отобр 1жются в цифровой форме на табло пульта 3 судоводителя. Вычислительное устройство 1 по сигналам имитатора рельефа дна и промысловых объектов, по скорости и направлению движения судна вычисляет текущие координаты судна и косяка в прямоугольной системе координат, которые .подаются на входы первого координатографа 9 и блока 7 изменения масштаба. Первый координатограф 9 вычерчивает на планшете путь движения судна и косяка р111бы для правильности .
решения задачи после окончания ее рещения.
Кроме того, вычислительное устройство 1 производит вычисление координат косяка рыбы относительно координат судна в полярной системе координат (курсовой угол косяка относительно судна, угол места, наклонную дальность до косяка и другие),
0 которые сравниваются с соответствующими величинами имитатора поворотно-выдвижного устройства гидролока тора 6. В случае совпадения соответствующих величин, вычислительное
5 устройство разрешает работу имитатора 10 гидроакустических сигналов, синхронизация которого осуществляется индикатором 5 гидролокатора, который отображает параметры,соответствующие обстановке. Судоводительоператор, используя информацию.с индикатора 5 гидролокатора, маневрирует судном, учитывая при этом параметры движения косяка, дрейф судна
5 и т.д. выходит в расчетную точку начала замета кошелькового невода.
После выхода в точку начала замета судоводитель-оператор включает на пульте 3 судоводителя режим Замет и производит Замет кошелькового невода. При Замете кошелькового невода блок 8 по скорости движения судна, ноступакицей из вычислительного устройства 1, вычисляет
длину выи едшего кошелькового невода, в метрах и переводит ее в четверти заданной длины. В условиях реального промысла доклад о длине вьшедшего кошелькового невода поступает на мостик судна по выходу с площадки очередной четверти предварительно пепромеренного кошелькового невода. Номер, вышедший четверти кошелькового невода, И1одуцируется в цифровой
форме индикатором 6 длины вьшедщего кошелькового невода. Одновременно с этим в режиме Замет разрешается работа блока 7 изменения масштаба, который увеличивает масштаб
0 планшета второго координатографа 11 по отношению к масштабу планшета первого координатографа 9, и путы движения судна во время замета вычерчивается в более крупном масштабе4
5 Второй координатограф 11 заменяет судоводителю-оператору визуальную картину замета на промысле. На планшете первого координатографа 9
отображается полная картина поиска косяка рыбы, сближение судна с косяком и обмет косяка кошельковым неводом.
При обучении на тренажере судоводитейи н гидроакустики приобретают навыки поиска косяка рыбы, определения характеристик движения косяка, замета кошелькового невода. Полученные при обучении на тренажере, знания помогают судоводителям и гидроакустикам быстрее освоить на промысле лов рыбы кошельковым неводом, что позволяет более эффективно использовать суда на промысле.
Формула изобретения
Тренажер судоводителя промыслового судна, содержащий вычислительное устройство, ко входам которого подключены пульты инструктора и судоводителя, имитатор рельефа дна и
промысловых объектов, и индикаторы длины вытравленного невода и гидролокатора, отличающийся тем, что, с цельго расширения функциональных возможностей, он снабжен блоком вычисления длины вытравленного невода, подключенным входом к выходу вычислительного устройства, а выходом - к индикатору длины невода, имитатором гидролокационных . сигнало связанным с выходами пульта инструктора и вычислительного устройства, подключенным входами к выходам вы числительного устройства и пульта судоводителя блоком измене ся масштабов и координатографами, один из которых подключен к выходу блока изменения масштаба, а другой - к выходу вычислительного устройства.
Источшжи информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 696522, кл. G 09 В 9/00, 1975 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер судоводителя | 1978 |
|
SU696522A2 |
| Радиолокационный тренажер | 1980 |
|
SU875437A1 |
| Тренажер судоводителя | 1972 |
|
SU484124A1 |
| СПОСОБ ИМИТАЦИИ ПОИСКА ПРОМЫСЛОВОГО ОБЪЕКТА ЛОВА В ОБУЧАЮЩЕМ ТРЕНАЖЕРЕ | 2011 |
|
RU2473131C2 |
| ТРЕНАЖЕР ДЛЯ ПРОМЫСЛА РЫБЫ | 1998 |
|
RU2147769C1 |
| ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ АВТОМАТИЗИРОВАННОГО ОБУЧЕНИЯ НАВЫКАМ ПОИСКА И ОБЛОВА РЫБЫ И МОРСКИХ БЕСПОЗВОНОЧНЫХ, ПОЛОЖИТЕЛЬНО РЕАГИРУЮЩИХ НА СВЕТ | 2009 |
|
RU2436168C2 |
| НАВИГАЦИОННЫЙ ТРЕНАЖЁР | 2023 |
|
RU2838905C2 |
| СПОСОБ ОЦЕНКИ КОНКУРЕНТОСПОСОБНОСТИ ГИДРОАКУСТИЧЕСКОЙ РЫБОПОИСКОВОЙ АППАРАТУРЫ И ИНФОРМАЦИОННО-АНАЛИТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2139554C1 |
| Способ лова гидробионтов | 1988 |
|
SU1648309A1 |
| СПОСОБ ЛОВА МОРСКИХ ГИДРОБИОНТОВ, ПОЛОЖИТЕЛЬНО РЕАГИРУЮЩИХ НА СВЕТ | 2005 |
|
RU2328116C2 |