I
Изобретение относится к приборостроению, в частности к устройству, которое предназначено для тарирования измерителя поперечных перемещений магнитной ленты в аппарате магнитной записи..
Известно несколько направлений в кшструйровашш устройств, осуществляющих измерение паразитных перемещеннй движущейся магнитной ленты в аппарате магнитной записи. Соответствующим образом каждое такое устройство само по себе лакже требует через определенные промежуткн времени настройки. Если устройство построено на чисто механическом принципе, то его тарнрование осуществляется с помощью вала, имеющего ряд прям угольных зубьев, и тогда только на выходе механические колебания преобразуются в электрические 1. Здесь практически отсутствует возможность модуляции получаемых сигналов без внесения ощутимых погрешностей.
Если же сам измеритель построен на фотоэлектрическом принципе, то устройство для его тарирования также желательно выполнять; на этом принципе (2. В згом случае в устройстве для тарирования имеется фотоэлектрический датчик, выполненный в виде вращающегося диска. В данном устройстве легче, чем в предьщущем осуществить модуляцию сигнала, но в связи с тем, что такой диск обязательно имеет какЫ1-то эксцентриситет (хотя в устройстве предусмотрена возможность регулировки положения диска относительно центра его вращения), точность получаемых результатов оказывается недостаточно высокой.
Наиболее близким к предлагаемому является устройство для тарирования измерителя пояереошх перемещений магннтнсж ленты, содержащее .последовательно, соединенные осHOBHdi вибратор и блок управления, атакже входящие в исследуемый измеритель датчики перемещения, подключенные к разным входам вычитания, схему задержки и регистратор, связанный с выходом блока вычитания через интегратор {3.
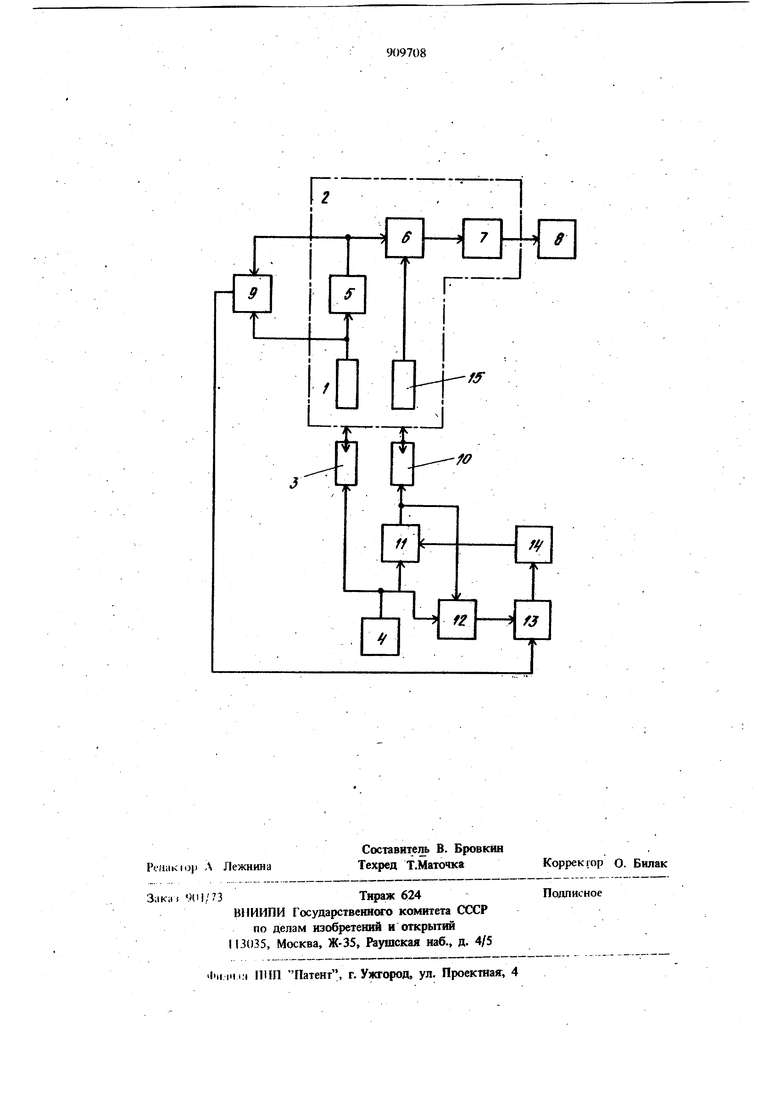
Однако в таком устройстве затруднительно произвести корреляцию работы датчиков перемещения, что. снижает точность результатов тарирования. 3 9 Цель изобретения - повышение точности результатов тарирования путем корреляции работы датчиков перемещения. Указанная цель достигается тем, что в устройство для тарирования измерителя поперечных перемещений магнитной ленты, содерж щее последовательно соединенные основной виб ратор и блок управления, а также входящие в исследуемый измеритель датчики перемещения, подключенные к разным входам блока вьрштания, схему задержки и регистратор, связанный с выходом блока вычитания через интегратор, введены первый измеритель разности фаз и последовательно соединенные второй измеритель разности фаз, элемент сравнения, преобразователь, управляемый фазовращатель и дополнительный вибратор, при этом разные входы первого измерителя разности фаз соединены с входами основного и дополнительного вибраторов, выход этого измерителя - с вторым входом элемента сравнения, выход блока управления - с входом основного вибратора и с вторым входом зт1равляемого фазовращателя, а разные входы второго измерителя разности . фаз соответственно подключены к входу и выходу схемы задержки, включенной между одним из датчиков перемещения и одним из входов блока вычитания. На чертеже показана структурная схема предлагаемого устройства. Напротив датчика 1 перемещения, входящего в исследуемый измеритель 2, расположен основной вибратор 3, соединенный с блоком 4 управления. Сам же датчик 1 через последовательно соединенные схему 5 задержки, блок 6 вычитания и интегратор 7 связан с регистратором 8, а также с одним из входов измерителя 9разности фаз, другойвход которого подключен к выходу схемы задержки и одновременно к одному из входов блока вычитания. Вибрато 10соединен с выходом управляемого фазовращателя 11, к одному из входов которого. подключены псюледовательно соединеннью другой измеритель 12 разности .фаз, элемент 3 сравнения и преобразователь 14. Второй вход управляемого фазовращателя связан с основным вибратором и с блоком управления. Напротив вибратора 10 установлен датчик 15 перемещени Устройство работает следующим образом. Обязательным условием точности показаний выходных параметров является выбор одинаковых расстояний между вибраторами и датчиками. После этого блок управления выдает Напря жение, которое возбуждает оба вибратора, uf этом вибратор 3 получает напряжение от блока управления непосредственно, а вибратор Ю - через фазовращатель 11, соэдающий определенное время задержки для напряжения возбуждения. Но в связи с тем, что в устройстве имеется 8 также еще и схема 5 задержки, то возникает необходимость сопоставления времен задержки , создаваемых и схемой задержки, и фазовращателем. Для этого имеются измерители 9 и 12 разности фаз. Сигналы с обоих измерителей подаются на схему далее, но перед этим они попадают в элемент 13 сравнения, который формирует разностный сигнал, преобр,азуемый далее преобразователем 14 в сигнал, приемлемый для управления фазовращателем 11. Во всех случаях последний стремится свести раэни цу в сигналах к минимальной величине. В результате имеет место система автоматической регулировки и подстройки положения вибраторов относительно датчиков. Предлагаемое устройство позволяет помимо повыщешя точности его работы уменьишть трудозатраты на настройку и наладку, так как автоматическая регулировка уровней напряжения дает возможность с пониженной точностью устанавливать вибраторы и не следить за стабильностью питающего напряжения. Формула изобретен и я Устройство для тарирования измерителя поперечных перемещений магнитной ленты, содержащее последовательно соединенные основной вибратор и блок управления, а также входящие в исследуемый измеритель датчики перемещения, подключенньте к разным входам блока 1вычитания, схему задержки и регистратор, связанный с выходом блока вычитания через интегратор, о тличающееся тем, что, с целью повБппения точности результатов тарирования путем корреляции работы датчиков перемещения, в него введены первый измеритель разности фаз и последовательно. соед1Я1еннь1е второй измеритель разности фаз, элемент сравнения, преобразователь, управляемый фазовращатель и дополнительный вибратор, при этом разные входы первого изме рителя разности фаз соединены с входами основного и дополнительного вибраторов,. выход этого измерителя - с вторым входом элемента сравнения, выход блока управления - с входом основного вибратора и с вторым входом управляемого фазовращателя, а разные входы второго измерителя разности фаз соответственно подключены к входу и выходу схемы задержки, включенной между одним из датчиков перемещения и одним из входов блока вычитания. Источники информации, принятые во внимание при экспертизе 1.Патент США М« 3488581, кл. 324/61, 1970. 2.Авторское свидетельство СССР № 473209, кл. G И Б 27/36, 1972. 3.Патент США N 3539912, (.ел. 342/34, 1970 (прототип).
2
п

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2009 |
|
RU2461021C2 |
| Устройство для измерения зависимости натяжения от скручивания движушейся магнитной ленты | 1978 |
|
SU669404A1 |
| Устройство селекции движущихся целей для радиолокатора с вобуляцией периода повторения | 1984 |
|
SU1841287A1 |
| Устройство для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории | 2018 |
|
RU2694084C1 |
| Устройство для исследования повреждаемости образцов материалов при испытаниях на усталость | 1972 |
|
SU446808A1 |
| АНАЛИЗАТОР ХАРАКТЕРИСТИЧЕСКОЙ ФУНКЦИИ СИГНАЛА | 2002 |
|
RU2231798C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2013 |
|
RU2529626C2 |
| УСТРОЙСТВО ДЛЯ АНАЛИЗА АКУСТИЧЕСКИХ ХАРАКТЕРИСТИК | 1973 |
|
SU373639A1 |
| Дифференциальный измеритель неоднородностей синусоидного магнитного поля | 1978 |
|
SU788058A1 |
| Устройство для счета движущихся объектов | 1986 |
|
SU1381556A1 |
L.
rlTTI,
.J
fff
11
f/
fz
f3
