Изобретение относится к средствам исследования батиметрического поля на акватории путем регистрации глубин посредством эхолота.
Известны способы и устройства для исследования батиметрического поля на акватории [1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11].
В известных способах для определения поправки эхолота, связанной с пространственной неоднородностью скорости звука в воде на глубинах до 30 м (согласно нормативным документам по съемке рельефа дна), необходимо производить сложное и трудоемкое действие - тарирование эхолота специальным тарирующим устройством. Причем данная операция должна осуществляться не менее двух раз в сутки (в начале и в конце съемки) с целью определения поправки эхолота. На акваториях с глубинами свыше 30 м должно осуществляться измерение на гидрологических станциях температуры, солености и давления воды или скорости распространения звука в воде специальным измерителем для определения поправки за отклонение действительной скорости звука в воде от расчетной и за рефракцию акустического луча эхолота.
При тарировании эхолота необходимо прекращать съемку и переходить на участок акватории съемки с наибольшими глубинами, где при нахождении судна на якоре или в дрейфе осуществлять погружение (подъем) с борта судна контрольной доски (диска) или приемного вибратора тарирующего устройства в рабочую зону излучающего вибратора эхолота на 10 фиксированных горизонтах тарирования. Погрешность определения поправок эхолота данным методом вследствие неучета изгиба троса под воздействием на погружаемый вибратор или тарирующую доску (диск) течения и дрейфа судна и глазомерного определения глубины горизонта тарирования по меткам на тросе может составлять 1-4% [1].
Для определения с требуемой точностью поправок за изменения осадки судна на мелководье (за проседание судна) необходимо выполнить сравнительно большое число пробегов судна-носителя эхолота на разных глубинах, при различных скоростях и при различной осадке судна с целью получения данных для составления таблиц или номограмм.
Кроме того, необходимо определить группу инструментальных поправок к измеренным эхолотом расстояниям до дна, определение которых также характеризуется большой сложностью и трудоемкостью. Тарирование измеренных эхолотом наклонных расстояний выполняют путем сравнения значений глубин, измеренных центральным и боковыми лучами эхолота в идентичных точках в зоне полос обследования пересекающихся галсов [2]. Так как расстояния, измеренные центральным зондирующим лучом, содержат большинство из перечисленных погрешностей, а точное совпадение точек отражения на дне, до которых измерены расстояния центральным и боковыми лучами, практически невозможно, то не обеспечивается достижение требуемого уровня точности съемки рельефа дна.
На глубинах акватории свыше 30 м поправка эхолота вычисляется как сумма частных поправок, получаемых в результате учета отдельных погрешностей: поправки за отклонение действительной скорости звука в воде от расчетной, поправки за рефракцию, поправки за отклонение частоты вращения электродвигателя от номинальной, поправки за место нуля эхолота, поправки за углубление вибраторов, поправки за наклон дна.
Повышение точности съемки батиметрического поля на акватории обеспечивает известный способ определения поправок к глубинам, измеренным однолучевым промерным эхолотом при съемке рельефа дна акватории, и устройство для его осуществления [12], который включает погружение до заданного горизонта или до поверхности дна, а затем подъем до поверхности акватории, вертикально удерживающей базы с известной длиной b и с расположенными на нижнем конце базы приемоизлучающего вибратора (приемоизлучающей антенны) однолучевого эхолота с возможностью излучения и приема гидроакустического сигнала по вертикали до поверхности акватории, а также датчиков гидроакустического давления и температуры, а на верхнем конце базы вторых датчиков гидроакустического давления и температуры.
При этом синхронно измеряется гидростатическое давление и температура на верхнем и нижнем концах базы, фиксируются исправленные температурной поправкой измеренные величины гидростатического давления  и
и  , измеряется гидроакустическим путем глубина погружения приемоизлучающего вибратора
, измеряется гидроакустическим путем глубина погружения приемоизлучающего вибратора  , а истинные значения поправок
, а истинные значения поправок  определяют расчетным путем исходя из формульных зависимостей:
определяют расчетным путем исходя из формульных зависимостей:
 ;
;
 ;
;
 ;
;
 ,
,
где i (i=1, N) - номер посылки излучающего вибратора, начиная с момента погружения в воду верхнего конца базы и заканчивая моментом достижения верхним концом базы при ее подъеме поверхности акватории;
 ,
,  - гидростатические давления, синхронно измененные при k-ой посылке эхолота датчиками гидростатического давления соответственно на верхнем и нижнем концах базы и исправленные поправкой за температуру, начиная с момента погружения верхнего конца базы и заканчивая моментом достижения верхним концом базы при ее подъеме поверхности акватории;
- гидростатические давления, синхронно измененные при k-ой посылке эхолота датчиками гидростатического давления соответственно на верхнем и нижнем концах базы и исправленные поправкой за температуру, начиная с момента погружения верхнего конца базы и заканчивая моментом достижения верхним концом базы при ее подъеме поверхности акватории;
,  - гидростатические давления, измеренные соответственно гидростатическим датчиком, расположенным на нижнем конце базы, при k-ой и (k+1)-ой посылке гидроакустического сигнала до поверхности акватории, и исправленные поправкой за температуру, начиная с момента погружения верхнего конца базы и заканчивая моментом достижения верхним концом базы при ее подъеме поверхности акватории;
- гидростатические давления, измеренные соответственно гидростатическим датчиком, расположенным на нижнем конце базы, при k-ой и (k+1)-ой посылке гидроакустического сигнала до поверхности акватории, и исправленные поправкой за температуру, начиная с момента погружения верхнего конца базы и заканчивая моментом достижения верхним концом базы при ее подъеме поверхности акватории;
δzi - поправка глубины горизонта тарирования (погружение приемоизлучающего вибратора однолучевого эхолота).
Способ реализован в виде тарирующего устройства [12], содержащего:
- передатчик и измерительный приемный блок, подключенные соответственно к приемоизлучающему вибратору;
- базу с положительной и отрицательной плавучестью, закрепленную в кардановом подвесе, погружаемую на заданный горизонт тарирования и поднимаемую до поверхности акватории в вертикальном положении;
- реле, датчики гидростатического давления и температуры, закрепленные на верхнем конце базы;
- датчики гидростатического давления, температуры и приемоизлучающий вибратор с возможностью излучения гидроакустического сигнала до поверхности акватории по вертикали и приема отраженного от нее сигнала, закрепленные на нижнем конце базы;
- блок управления, блок определения поправок к глубинам, измеренным эхолотом, регистратор.
Выходы реле, датчиков гидростатического давления и температуры, измерительного приемного блока через блок управления соединены с входом блока определения поправок к измеренным эхолотом глубинам, выход которого соединен с входом регистратора.
Оценка точности определения поправки к глубинам, измеренным эхолотом, данными способом и тарирующим устройством осуществляется по формуле [12]:

где σΔz - СКП определения поправки к глубинам, измеренным эхолотом;
σP - СКП измерения гидростатического давления датчиком;
φ - широта места тарирования;
P1, Pz - гидростатическое давление в децибарах, измеренное соответственно на первом и данном горизонте тарирования.
Для случая, когда СКП современных серийных датчиков гидростатического давления составляет 0,05 дбар [1], погрешность определения поправки к измеренной эхолотом глубины предлагаемым способом с использованием тарирующего устройства при глубинах горизонта до 200 м составляет 0,1 м независимо от горизонта тарирования. Приведенный показатель в предложенном способе [12] - в 2 раза превышает аналогичные показатели известных способов и тарирующих устройств [1,2], при погрешности за счет искривления кабель-троса, которая на глубине горизонта 40 м достигает 4% от глубины.
Положительный эффект способа и тарирующего устройства для определения поправок к измеренным эхолотом глубинам заключается в увеличении точности за счет определения поправок датчиками гидростатического давления и температуры воды. Недостаток данных способа и тарирующего устройства заключается в невозможности использования для определения поправок к глубинам и к их геодезическим координатам, измеренным цифровым многолучевым эхолотом в полосе его зондирования.
Использование кабель-троса для удержания тарирующего устройства ограничивает диапазон глубин, а соответственно и максимальный горизонт определения поправок, который ограничен длиной кабель-троса.
Кроме того, анализ выявленных источников информации показал, что в настоящее время отсутствуют способ и тарирующее устройство определения поправок к глубинам и к их геодезическим координатам, измеренным в полосе зондирования многолучевым эхолотом на акватории съемки, а следовательно, отсутствует метрологическое обеспечение, позволяющее осуществлять единство измерений при съемке рельефа дна многолучевыми эхолотами на акватории съемки, что существенно снижает достоверность получения объективной информации.
Задачей заявляемого технического решения является повышение достоверности поправок при измерении глубины посредством использования многолучевого эхолота.
Поставленная цель достигается за счет того, что в устройстве для осуществления способа, содержащем передатчик и измерительный приемный блок, подключенные соответственно к излучающей и приемной антеннам, регистратор и блок управления, соединенный с измерительным приемным блоком, базу с положительной и отрицательной плавучестью, с возможностью спуска ее на заданный горизонт тарирования и подъема до поверхности воды в вертикальном положении, на верхнем конце которой закреплены воспринимающие контакты реле, исполняющие контакты которого соединены с блоком управления, совместно с излучающей антенной, приемной антенной и датчиками гидростатического давления и температуры на нижнем конце базы и датчиками гидростатического давления и температуры на верхнем конце базы, выходы которых через блок управления соединены с входом блока определения поправок к глубинам, с возможностью излучения гидроакустического сигнала до поверхности по вертикали и приема отраженного от нее сигнала блоком определения поправок к глубинам, измеренным эхолотом, вход которого через блок управления соединен с выходом приемоизмерительного блока, а выход соединен с входом регистратора - на верхнем конце базы установлена антенна приемника спутниковой радионавигационной системы, на нижнем конце базы размещены излучающая и приемная антенны с излучением гидроакустических сигналов по нескольким лучам до поверхности дна акватории по вертикали и приема отраженных от нее сигналов по центральному и наклонным лучам, датчики горизонтальных и вертикальных перемещений удерживаемой базы и датчик измерения скорости звука, измеритель относительной скорости, магнитный компас и гироазимутгоризонт-компас, установленные в карданом подвесе, каналы спутниковой радионавигационной и гидроакустической связи, подключенные к блоку управления, а отрицательная плавучесть выполнена в виде бетонного секционного балласта, который сочленен с вертикальной базой по ее радиусу посредством ступенчатых строп с электрохимическими размыкателями.
Сущность изобретения поясняется чертежами.
Фиг.1 - Блок-схема устройства. Устройство содержит многолучевой эхолот 1, регистратор 2, блок управления 3, блок определения поправок 4, измерительный приемный блок с антенной 5, передатчик с антенной 6, датчик измерения скорости звука 7, 8, измерительный приемный блок с антенной 9, передатчик с антенной 10, датчики температуры воды 11, 12, датчики гидростатического давления 13, 14, реле 15, канал связи 16 спутниковой радионавигационной системы, датчики горизонтальных и вертикальных перемещений 17, магнитный компас 18, гирогоризонт-компас 19, гидроакустический канал связи 20, измеритель относительной скорости 21.
Измерительный приемный блок с антенной 5 и передатчик 6 с антенной выполняют аналогичные функции, что и в прототипе [12]. Измерительный приемный блок с антенной 9 и передатчик с антенной 10 соответственно формируют и принимают акустические сигналы по пяти лучам (одному центральному и четырем боковым лучам). Фиг.2 - вертикальная база. Вертикальная база 22 выполнена в виде цилиндра, в верхней части которого расположена герметичная емкость 23 для обеспечения положительной плавучести. В нижней части вертикальной базы на внешней поверхности по радиусу расположена отрицательная плавучесть, выполненная в виде бетонный конструкции 24 для обеспечения отрицательной плавучести и закрепленной на корпусе вертикальной базы посредством строп 25, которые в месте сочленения с бетонной конструкцией выполнены в виде секций 26, снабженных электрохимическими размыкателями 27. Бетонная конструкция 24 выполнена в виде пластин 28, охваченных секциями 26 строп 25. Внутри вертикальной базы 22 на кардановом подвесе 29 установлен магнитный компас 18 и гироазимутгоризонт-компас 19. На внутренних стенках и полках 30 вертикальной базы 22 расположены датчики измерения линейных и угловых скоростей и ускорений 17. На внутренних полках установлены блок управления 3, регистратор 2, измерительный приемный блок 5, передатчик 6, блок определения поправок 4, канал гидроакустической связи 20, приемопередающая антенна 31 которого установлена на верхней плоскости вертикальной базы 22, канал спутниковой радионавигационной связи 16, приемопередающая антенна 32 которого установлена на верхней плоскости вертикальной базы 22, на верхней плоскости которой также установлены измерительный приемный блок с антенной 5 и передатчик с антенной 6. В стенке вертикальной базы 22 расположены электроды 33 измерителя относительной скорости 21, измерительный блок 34 которого установлен на полке 30. Также на стенке вертикальной базы 22 в верхней и нижней части размещены датчики температуры воды 11, 12 и датчики гидростатического давления 13, 14. Реле 15 размещено в верхней части вертикальной базы 22. Измерительный приемный блок с антенной 9 и передатчик с антенной 10 размещены на нижней поверхности вертикальной базы 22. Фиг.3 - датчик измерения скорости звука 7 состоит из излучающего преобразователя 35, приемного преобразователя 36, импульсного генератора 37, усилителя 38, частотного дискриминатора 39, делителя частоты 40, генератора управляемого напряжением 41, морской воды 42.
Датчик измерения скорости звука 7 представляет собой замкнутое через морскую воду 42 акустическое кольцо синхронизации, образованное излучающим преобразователем 35 и приемным преобразователем 36, усилителем 38 и импульсным генератором 37, запускаемым по сигналам с выхода усилителя 38. Частота следования импульсов в данном кольце пропорциональна скорости звука в воде. В частотном дискриминаторе 39 эта частота следования сравнивается с частотами, излучаемыми передатчиками с антенной 6 и 10. Частотный дискриминатор 39 представляет собой гармонику сигнала в кольце. При изменении скорости звука в воде на выходе частотного дискриминатора 39 появляется управляющее напряжение того или иного знака, изменяющее соответствующим образом частоту излучаемого передатчиком 6 или передатчиком 10 сигнала. При этом автоматически поддерживается постоянной длина волны колебаний, излучаемых вибратором. Датчики измерения скорости звука 7 и 8 предназначены для непосредственного измерения скорости звука на горизонтах передатчиков 6 и 10 соответственно.
Излучающий 35 и приемный 36 преобразователи каждого датчика измерения скорости звука установлены соответственно на верхней и нижней плоскости вертикальной базы 22, а блоки 37, 38, 39, 40, 41 внутри вертикальной базы 22 на полках 30.
Аналог датчика измерения скорости звука 7(8) приведен в источнике: Судовые измерители скорости // Под ред. Хребтова А.А. - М.: Транспорт, 1978, с.132-133.
Измеритель относительной скорости 21 представляет собой индукционный измеритель скорости, аналоги которого описаны в источнике: Судовые измерители скорости // под ред. Хребтова А.А. - М.: Транспорт, 1978, с.47-68. Измеритель относительной скорости 21 предназначен для определения модуля вектора относительной скорости вертикальной базы 22 угла ее дрейфа при погружении и всплытии.
Сущность предлагаемого способа и устройства для его осуществления заключается в следующем.
Перед съемкой рельефа дна на акватории выбирают места для выполнения тарирования эхолота, в которых судно устанавливают на якорь или оставляют в дрейфе.
Посредством судового спускоподъемного устройства вертикальную базу 22 опускают за борт в воду с учетом того, чтобы приемопередающая антенна 31 спутникового радионавигационного канала связи 15 оставалась над поверхностью воды. По сигналам с судового измерительного комплекса запускают в работу блок управления 3 и канал связи спутниковой радионавигационной системы, по которой определяют начальные координаты вертикальной базы 22. После этого продолжают спуск вертикальной базы 22 и в момент соприкосновения с водой воспринимающих контактов реле 15 исполнительные контакты реле замыкают в блоке управления 3 электрические цепи формирования импульсов запуска передатчиков 6, 10 и многолучевого эхолота 1. Одновременно по сигналам с судового измерительного комплекса по гидроакустическому каналу связи 20 подаются сигналы на блок управления 3 для запуска в работу остальных средств измерения. Посредством механизмов судового спускоподъемного устройства вертикальную базу 22 опускают на заранее установленные глубины и выполняют измерения регистрацию сигналов на 3 - 5 горизонтах по глубине. Затем освобождают вертикальную базу от удерживающего ее троса, и она под действием отрицательной плавучести начинает погружаться в сторону дна. В процессе погружения вертикальной базы производится измерение скорости распространения звука, расстояний до дна и поверхности акватории, относительной скорости и угла дрейфа при погружении и всплытии вертикальной базы, курса, крена и дифферента, линейных и угловых скоростей и ускорений, температуры воды и давления. Измеренные величины по каналу гидроакустической связи транслируются в судовой измерительный комплекс, с которого при достижении дна вертикальной базой на блок управления 3 подается сигнал на всплытие. При этом с блока управления 3 подается сигнал на электрохимические размыкатели 27. При этом на размыкатели подается электрический сигнал, под действием которого электрохимические размыкатели растворяются в морской воде, освобождая при этом стропы 25, которые в свою очередь освобождают пластины 28. Пластины 28 освобождаются от строп постепенно, что позволяет замедлить всплытие вертикальной базы 22. При всплытии вертикальной базы 22 на поверхность посредством спутниковой радионавигационной системы определяют ее координаты. В процессе всплытия также осуществляются измерения.
По полученным массивам измерений, выполненных при погружении вертикальной базы до дна, при нахождении ее на дне и при ее всплытии на поверхность определяют поправки тарирования.
Посредством приемника спутниковой радионавигационной системы типа GPS или "Глонасс" в моменты погружения и всплытия вертикальной базы 22 определяют геодезические координаты х0n, y0n и х0b, y0b соответственно. При обработке сигналов, полученных посредством гироазимутгоризонт-компаса, магнитного компаса, измерителя относительной скорости, датчиков линейных и угловых скоростей и ускорений определяют текущие геодезические счислимые координаты  ,
,  , крен α, дифферент φ, азимут А направления полосы зондирования гидроакустических сигналов до поверхности акватории приемоизлучающей антенной многолучевого эхолота, скорость распространения звука в воде в районе распространения данной антенны. Определяют на i горизонте по каждому j лучу глубину погружения
, крен α, дифферент φ, азимут А направления полосы зондирования гидроакустических сигналов до поверхности акватории приемоизлучающей антенной многолучевого эхолота, скорость распространения звука в воде в районе распространения данной антенны. Определяют на i горизонте по каждому j лучу глубину погружения  приемоизлучающей антенны и его геодезические координаты
приемоизлучающей антенны и его геодезические координаты  ,
,  акустическим путем, а затем вычисляются искомые значения поправок к глубинам
акустическим путем, а затем вычисляются искомые значения поправок к глубинам  и к их геодезическим координатам
и к их геодезическим координатам  ,
,  для i-ых горизонтов в полосе зондирования многолучевого эхолота по формулам.
для i-ых горизонтов в полосе зондирования многолучевого эхолота по формулам.
Для центрального луча:
 ;
;
 ;
;
 ,
,
где  вычисляется по формуле
вычисляется по формуле  ;
;
 ;
;
 ;
;
 ,
,
где i (i=1, N) - номер посылки сигналов, начиная с момента погружения в воду верхнего конца базы и заканчивая моментом достижения верхним концом базы при ее подъеме поверхности акватории;
,  - гидростатические давления, синхронно измененные при k-ой посылке эхолота датчиками гидростатического давления соответственно на верхнем и нижнем концах базы и исправленные поправкой за температуру, начиная с момента погружения верхнего конца базы и заканчивая моментом достижения верхним концом базы при ее подъеме поверхности акватории;
- гидростатические давления, синхронно измененные при k-ой посылке эхолота датчиками гидростатического давления соответственно на верхнем и нижнем концах базы и исправленные поправкой за температуру, начиная с момента погружения верхнего конца базы и заканчивая моментом достижения верхним концом базы при ее подъеме поверхности акватории;
, - гидростатические давления, измеренные соответственно гидростатическим датчиком, расположенным на нижнем конце базы, при k-ой и (k+1)-ой посылке гидроакустического сигнала до поверхности акватории, и исправленные поправкой за температуру, начиная с момента погружения верхнего конца базы и заканчивая моментом достижения верхним концом базы при ее подъеме поверхности акватории;
δzi - поправка глубины горизонта тарирования (погружение приемоизлучающей антенны однолучевого эхолота), а  и
и  вычисляются по формулам:
вычисляются по формулам:




где k и N - количество разностей  ,
,  до заданного горизонта или до дна и до поверхности акватории соответственно.
до заданного горизонта или до дна и до поверхности акватории соответственно.
Для наклонных лучей:
где  ,
,  ,
,  - поправки к глубине погружения приемоизлучающей антенны многолучевого эхолота и к ее геодезическим координатам мест отражена гидроакустических сигналов на i горизонте по j лучу от поверхности акватории;
- поправки к глубине погружения приемоизлучающей антенны многолучевого эхолота и к ее геодезическим координатам мест отражена гидроакустических сигналов на i горизонте по j лучу от поверхности акватории;
 ,
,  ,
,  - истинные (эталонные) глубина до i горизонта и геодезические координаты в местах отражения гидроакустических сигналов от поверхности акватории, излученных приемоизлучающей антенной по j лучам соответственно, определенные многолучевым эхолотом.
- истинные (эталонные) глубина до i горизонта и геодезические координаты в местах отражения гидроакустических сигналов от поверхности акватории, излученных приемоизлучающей антенной по j лучам соответственно, определенные многолучевым эхолотом.
Значение каждой из глубин  равно глубине
равно глубине  , поскольку приемоизлучающая антенна расположена на нижнем конце погружаемой базы и ориентирована в i горизонте, излучает гидроакустические сигналы по j лучам до ровной поверхности дна и принимает эхосигналы на i горизонте по каждому j лучу в месте расположения данной антенны.
, поскольку приемоизлучающая антенна расположена на нижнем конце погружаемой базы и ориентирована в i горизонте, излучает гидроакустические сигналы по j лучам до ровной поверхности дна и принимает эхосигналы на i горизонте по каждому j лучу в месте расположения данной антенны.
Значения  и
и  определяются выражениями:
определяются выражениями:
где  и
и  - приращение к истинным геодезическим координатам на i горизонте центра приемоизлучающей антенны, расположенного на конце базы, в местах отражения гидроакустических сигналов от поверхности акватории по j лучам соответственно.
- приращение к истинным геодезическим координатам на i горизонте центра приемоизлучающей антенны, расположенного на конце базы, в местах отражения гидроакустических сигналов от поверхности акватории по j лучам соответственно.
Значения  и
и  вычисляют по формулам:
вычисляют по формулам:


где θij - угол между осью центрального луча приемоизлучающей антенны, ориентированного по вертикали на i горизонте и направлением приема отраженного акустического сигнала от поверхности акватории по j лучу.
Угол θij для зондирующего борта вычисляется по формуле:
θij=180°+θij,
а для лучей правого борта по формуле:
θij=180°-θij
Угол θij вычисляется по формуле:
 ,
,
где ϕd - фазовый сдвиг гидроакустического сигнала, принимаемого двумя смежными элементами антенны эхолота;
νзвпов - скорость распространения звука в воде у поверхности приемоизлучающей антенны, расположенного на конце базы;
f - частота гидроакустического сигнала;
d - длина базы между смежными чувствительными элементами приемоизлучающего вибратора многолучевого эхолота;
α - угол крена;
δ - конструктивный угол, образованный вертикалью и нормалью к базе между смежными чувствительными элементами приемоизлучающей антенны многолучевого эхолота.
Оценку точности определения истинных поправок к геодезическим координатам места измерения глубин, измеренных многолучевым эхолотом, можно произвести следующим образом из анализа формул для определения поправок. При этом принимаем гипотезу, что выражения под знаком суммы в правых частях не отягощены постоянными и систематическими составляющими погрешностей, поскольку в приращениях данные погрешности практически исключаются, а случайные инструментальные погрешности у современных многолучевых эхолотов незначительны по величине и имеют разные знаки, и, следовательно, при большом количестве измерений случайные погрешности под знаком суммы будут стремиться к нулю. Следовательно, погрешность определения геодезических координат будет практически равна погрешности определения геодезических координат приемником спутниковой радионавигационной системы типа GPS, которая составляет в дифференциальном режиме работы 10 см.
Использование устройства для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории для производства измерений и учета поправок к измеренным многолучевым эхолотом глубинам и к их геодезическим координатам, обеспечивает измерение глубин и их геодезических координат при выполнении съемки рельефа дна на акватории Мирового океана с требуемой точностью ввиду того, что обеспечивается точное измерение вертикального градиента глубины по гидростатическому давлению, измеряемому датчиками гидростатического давления на каждом горизонте тарирования за счет синхронно измеряемого параметра на базе с известной длиной, а также определение точного приращения параметра для каждого горизонта тарирования за счет вычисления разности следующих через небольшой промежуток времени отсчетов параметра, измерения скорости звука на горизонте антенн в широком диапазоне измеряемых глубин в процессе тарировочных работ.
Выполнение названных процедур обеспечивают исключение постоянных систематических погрешностей измерений приращений расстояния до поверхности или приращения гидростатического давления.
Предлагаемый способ обеспечивает увеличение глубины тарирования и получение глубины тарирования с нормированными метрологическими характеристиками.
Промышленная применимость предлагаемого способа и устройства для его осуществления технической трудности не представляет, так как при их реализации могут быть использованы серийно освоенные измерительные и программные средства.
Источники информации
1. Волков А.Е., Галошин А.И. и др. Руководство по использованию гидроакустических навигационных систем для определения места судна и подводных технических средств при выполнении морских геологоразведочных работ // СГФУ НПП по морским геологоразведочным работам. СПб, 1998.
2. Дадашев А.А. Тарирование многолучевого эхолота на пересекающихся галсах. // Записки по гидрографии. - 2000. - №251, с.42-46.
3. Патент RU №2123191 С1. 10.12.1998.
4. Патент RU №2045081 С1. 27.09.1995.
5. АС SU №472315 A1. 30.05.1975.
6. АС SU №100803 А1. 01.01.1955.
7. AC SU №1829019 A1. 23.07.1993.
8. АС SU №1838802 A3. 30.08.1993.
9. Патент US №4916674 A. 10.04.1990.
10. Патент DE №3438045 А. 23.05.1985.
11. Патент ЕР №0106205 А. 25.04.1984.
12. Патент RU №2292062 С2. 20.01.2007.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории, и устройство для определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории | 2019 |
|
RU2724366C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2013 |
|
RU2529626C2 |
| Устройство для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории | 2018 |
|
RU2694084C1 |
| Способ определения поправок к глубинам, измеренным однолучевым эхолотом при съёмке рельефа дна акватории, и устройство для его осуществления | 2017 |
|
RU2649027C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ОДНОЛУЧЕВЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2615639C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИЙ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2292062C2 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ | 2012 |
|
RU2519269C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2340916C1 |
Изобретение относится к средствам исследования батиметрического поля на акватории путем регистрации глубин посредством эхолота. Техническим результатом изобретения является повышение достоверности определения поправок. Устройство содержит многолучевой эхолот 1, регистратор 2, блок управления 3, блок определения поправок 4, измерительный приемный блок с антенной 5, передатчик с антенной 6, датчики измерения скорости звука 7, 8, измерительный приемный блок с антенной 9, передатчик с антенной 10, датчики температуры воды 11, 12, датчики гидростатического давления 13, 14, реле 15, канал связи 16 спутниковой радионавигационной системы, датчики горизонтальных и вертикальных перемещений 17, магнитный компас 18, гирогоризонт-компас 19, гидроакустический канал связи 20, измеритель относительной скорости 21. 3 ил.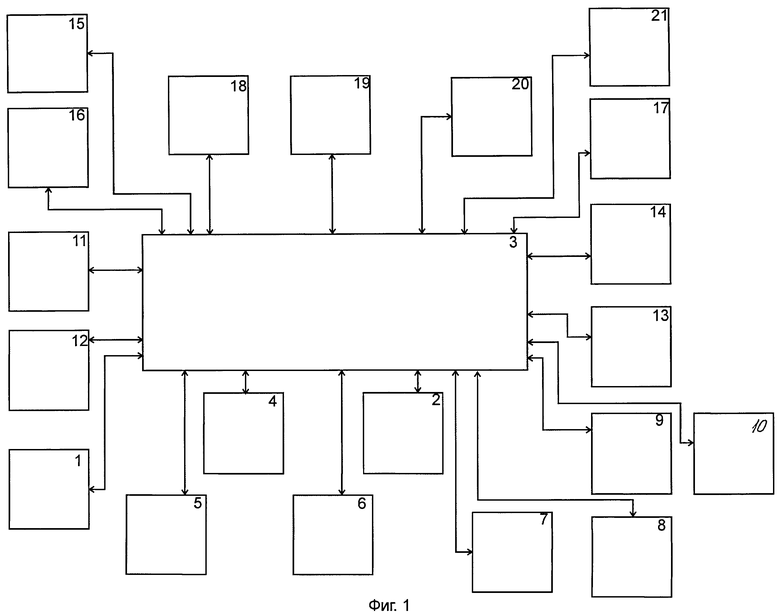
Устройство для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории, содержащее передатчик и измерительный приемный блок, подключенные соответственно к излучающей и приемной антеннам, регистратор и блок управления, соединенный с измерительным приемным блоком, базу с положительной и отрицательной плавучестью с возможностью ее спуска на заданный горизонт тарирования и подъема до поверхности воды в вертикальном положении, на верхнем конце которой закреплены воспринимающие контакты реле, исполняющие контакты которого соединены с блоком управления, совместно с излучающей антенной, приемной антенной и датчиками гидростатического давления и температуры на нижнем конце базы и датчиками гидростатического давления и температуры на верхнем конце базы, выходы которых через блок управления соединены с входом блока определения поправок к глубинам, с возможностью излучения гидроакустического сигнала до поверхности акватории по вертикали и приема отраженного от нее сигнала, блоком определения поправок к глубинам, измеренным эхолотом, вход которого через блок управления соединен с выходом приемоизмерительного блока, а выход соединен с входом регистратора, отличающееся тем, что на верхнем конце базы установлены антенны каналов спутниковой радионавигационной и гидроакустической связи, на нижнем конце базы размещены приемник с антенной и приемоизлучающий блок с антенной с излучением гидроакустических сигналов по нескольким лучам до поверхности дна акватории по вертикали и приема отраженных от нее данных сигналов по центральному и наклонным лучам, датчики горизонтальных и вертикальных перемещений удерживаемой базы, датчик измерения скорости распространения звука в воде, датчики горизонтальных и вертикальных перемещений удерживаемой базы, измеритель относительной скорости, магнитный компас и гироазимутгоризонткомпас, установленные на кардановом подвесе, каналы спутниковой радионавигационной и гидроакустической связи, подключенные к блоку управления, а отрицательная плавучесть выполнена в виде бетонного секционного балласта, который сочленен с вертикальной базой по ее радиусу посредством ступенчатых строп, снабженных электрохимическим размыкателем.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИЙ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2292062C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272303C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2340916C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| JP 10325871 A, 08.12.1998 | |||
| JP 4372890 A, 25.12.1992. | |||

