Изобретение относится к области радиолокации, в частности к системам селекции движущихся целей, и может быть использовано в РЛС с вобулированной последовательностью излучаемых импульсов для подавления отражений от движущихся дипольных отражателей и метеообразований.
Известно устройство подавления мешающих отражений от движущихся дипольных отражателей и метеообразований, содержащее соединенные последовательно первый и второй элементы памяти, первый и второй измерители разности фаз, включенные соответственно параллельно первому и второму блокам памяти, выходной весовой сумматор, первый управляемый фазовращатель, вход которого соединен со входом первого элемента памяти, а выход - со входом единичного веса выходного сумматора, второй управляемый фазовращатель, вход которого соединен с выходом второго элемента памяти, а выход соединен со вторым входом единичного веса выходного сумматора. При этом выход первого измерителя разности фаз подключен ко входу управления второго управляемого фазовращателя и наоборот, выход второго измерителя разности фаз подключен ко входу управления первого управляемого фазовращателя, а выход первого элемента памяти соединен с входом веса "-2" выходного сумматора (см. авт. свид. СССР №1841288, МКИ4 G01S 13/52, 1979 г.). Благодаря перекрестным связям между измерителями разности фаз и управляемыми фазовращателями в известном устройстве СДЦ при наличии вобуляции периода повторения удается реализовать скоростную характеристику со сжатым масштабом доплеровских скоростей вида  где Vr - радиальная скорость, λ - длина волны, ΔТ=T1-T2 разность вобулированных периодов повторения, которая позволяет компенсировать в том числе эхо-сигналы от дискретных медленно движущихся пассивных помех без компенсации полезных сигналов быстродвижущихся целей. Однако известное устройство имеет недостаточную эффективность подавления пассивных помех, так как в нем на базе 3-х импульсов реализуетcя однократное вычитание, что приводит к узкой зоне режекции пассивных помех. Известно устройство адаптивной компенсации пассивных помех в РЛС с вобуляцией периода повторения (Вопросы судостроения, сер. РЛТ, вып. 14, 1982 г., стр. 49, рис. 7), содержащее соединенные последовательно первый и второй элементы памяти, вход первого из которых является входом устройства, первый измеритель разности фаз, включенный параллельно первому элементу памяти, параллельно второму элементу памяти включен второй измеритель разности фаз, выходной весовой сумматор, первый управляемый фазовращатель, вход которого соединен с входом устройства, а выход соединен с первым входом единичного веса выходного сумматора, второй управляемый фазовращатель, вход которого соединен с выходом второго элемента памяти, а выход соединен с вторым входом единичного веса выходного весового сумматора, преобразователь оценок разности фаз, входы которого соединены с выходами первого и второго измерителей разности фаз, а выход соединен с управляющим входом первого фазовращателя, управляющий вход второго фазовращателя соединен с выходом первого измерителя разности фаз, а выход первого элемента памяти соединен с входом веса "-2" выходного сумматора. В данном устройстве на базе трех вобулированных импульсов реализуется двукратное череспериодное вычитание, т.е. скоростная характеристика в этом устройстве имеет вид
где Vr - радиальная скорость, λ - длина волны, ΔТ=T1-T2 разность вобулированных периодов повторения, которая позволяет компенсировать в том числе эхо-сигналы от дискретных медленно движущихся пассивных помех без компенсации полезных сигналов быстродвижущихся целей. Однако известное устройство имеет недостаточную эффективность подавления пассивных помех, так как в нем на базе 3-х импульсов реализуетcя однократное вычитание, что приводит к узкой зоне режекции пассивных помех. Известно устройство адаптивной компенсации пассивных помех в РЛС с вобуляцией периода повторения (Вопросы судостроения, сер. РЛТ, вып. 14, 1982 г., стр. 49, рис. 7), содержащее соединенные последовательно первый и второй элементы памяти, вход первого из которых является входом устройства, первый измеритель разности фаз, включенный параллельно первому элементу памяти, параллельно второму элементу памяти включен второй измеритель разности фаз, выходной весовой сумматор, первый управляемый фазовращатель, вход которого соединен с входом устройства, а выход соединен с первым входом единичного веса выходного сумматора, второй управляемый фазовращатель, вход которого соединен с выходом второго элемента памяти, а выход соединен с вторым входом единичного веса выходного весового сумматора, преобразователь оценок разности фаз, входы которого соединены с выходами первого и второго измерителей разности фаз, а выход соединен с управляющим входом первого фазовращателя, управляющий вход второго фазовращателя соединен с выходом первого измерителя разности фаз, а выход первого элемента памяти соединен с входом веса "-2" выходного сумматора. В данном устройстве на базе трех вобулированных импульсов реализуется двукратное череспериодное вычитание, т.е. скоростная характеристика в этом устройстве имеет вид  с большей зоной режекции, что повышает эффективность подавления пассивных помех. Однако и данное устройство не позволяет достичь предельно достижимого коэффициента подавления медленно движущихся пассивных помех, который можно получить в адаптивных режекторных фильтрах второго порядка, так как в нем используется только фазовая адаптация, без учета корреляции амплитуд отраженных сигналов от пассивной помехи.
с большей зоной режекции, что повышает эффективность подавления пассивных помех. Однако и данное устройство не позволяет достичь предельно достижимого коэффициента подавления медленно движущихся пассивных помех, который можно получить в адаптивных режекторных фильтрах второго порядка, так как в нем используется только фазовая адаптация, без учета корреляции амплитуд отраженных сигналов от пассивной помехи.
Целью изобретения является повышение эффективности подавления медленно движущихся пассивных помех. Поставленная цель достигается тем, что в устройство, содержащее соединенные последовательно первый и второй элементы памяти, вход первого из которых является входом устройства, первый измеритель разности фаз, включенный параллельно первому элементу памяти, параллельно второму элементу памяти включен второй измеритель разности фаз, выходной сумматор, первый управляемый фазовращатель, вход которого соединен со входом устройства, а выход соединен с первым входом единичного веса выходного сумматора, второй управляемый фазовращатель, вход которого соединен с выходом второго элемента памяти, а выход соединен с вторым входом единичного веса выходного весового сумматора, преобразователь оценок разности фаз, введен перемножитель, первый вход которого соединен с выходом первого элемента памяти, второй вход которого соединен с выходом преобразователя оценок разности фаз, а выход соединен с входом веса "-2" выходного сумматора, управляющие входы первого и второго управляемых фазовращателей соединены соответственно с выходом первого и второго измерителей разности фаз.
Заявителю не известна совокупность признаков, указанная в отличительной части формулы, которая бы использовалась в иной совокупности признаков и давала бы положительный эффект, тождественный достигаемому предложенным устройством. Таким образом, по мнению заявителя, предложенное техническое решение соответствует критерию "существенные отличия".
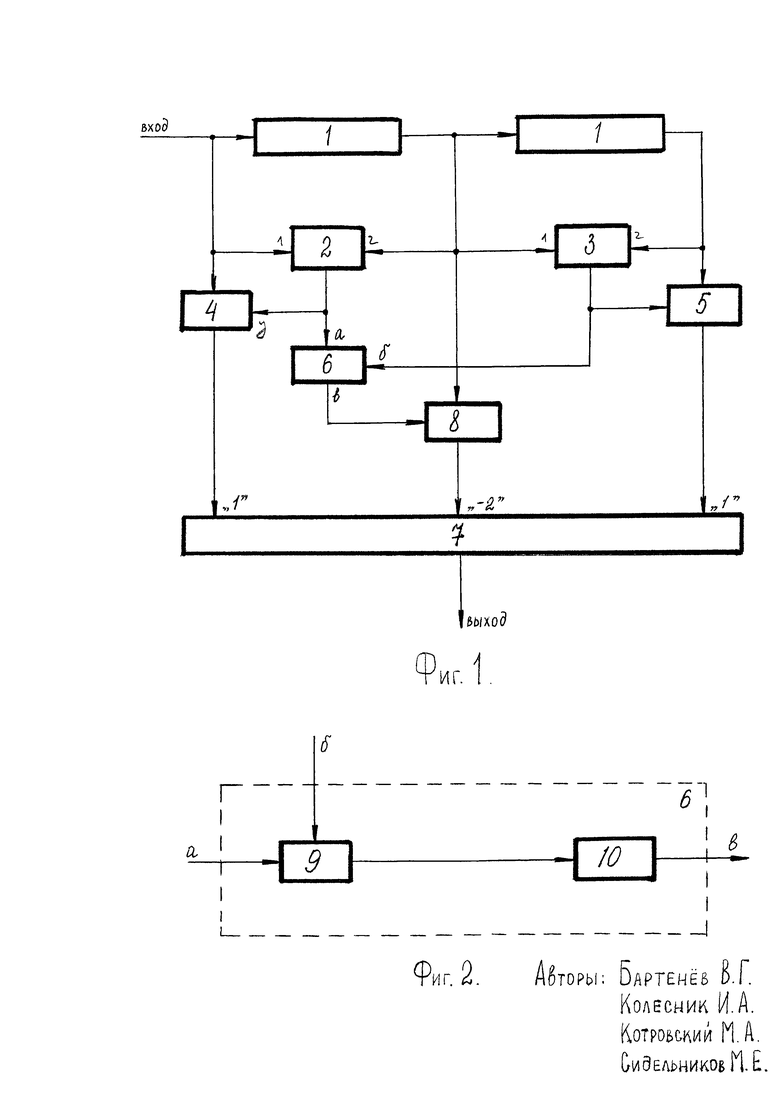
На фиг. 1 представлена структурная схема предложенного устройства, на фиг. 2 приведена структурная схема преобразователя оценки разности фаз, на фиг. 3 изображен вариант цифровой реализации первого и второго измерителей разности фаз, на фиг. 4 изображен вариант реализации первого и второго управляемых фазовращателей, на фиг. 5 изображен вариант реализации выходного весового сумматора.
На фиг. 1-5 приняты следующие обозначения:
1 - элементы памяти
2 - первый измеритель разности фаз
3 - второй измеритель разности фаз
4 - первый управляемый фазовращатель
5 - второй управляемый фазовращатель
6 - преобразователь оценок разности фаз
7 - выходной весовой сумматор
8 - перемножитель
9 - вычитатель
10 - функциональный преобразователь типа y=cosx
11 - комплексный перемножитель
12 - первый усреднитель
13 - второй усреднитель
14 - функциональный преобразователь типа y=Arctgx
15 - функциональный преобразователь типа y=cosx
16 - функциональный преобразователь типа y=sinx
17 - комплексный умножитель
18 - умножитель на коэффициент 2
19 - алгебраический сумматор-вычитатель.
Предлагаемое устройство состоит из двух последовательно включенных элементов памяти 1, параллельно элементам памяти 1 включенных первого и второго измерителей разности фаз 2 и 3, ко входу первого элемента памяти 1 подключен первый управляемый фазовращатель 4. К выходу второго элемента памяти 1 подключен второй управляемый фазовращатель 5, выходы первого и второго измерителей разности фаз 2 и 3 подключены соответственно к управляющим входам первого и второго управляющих фазовращателей 4 и 5, выход первого элемента памяти 1 и вход второго элемента памяти 1 подключены к первому входу перемножителя 8, ко второму входу перемножителя 8 подключен выход преобразователя оценок разности фаз 6. Выходы первого и второго измерителей разности фаз 2 и 3 подключены к входам преобразователя оценок разности фаз 6, выходы первого и второго управляемых фазовращателей 4 и 5 и перемножителя 8 подключены к входам выходного весового сумматора 7.
Устройство работает следующим образом. Вначале рассмотрим работу устройства при обработке когерентной пачки из 3-х импульсов с периодами повторения T1 и T2. Отраженные эхо-сигналы от трех зондирований совмещаются во времени с помощью элементов памяти 1 и с их входов и выходов поступают как в измерители разности фаз 2 и 3, так и на входы управляемых фазовращателей 4 и 5 и перемножителя 8. В измерителях разности фаз 2 и 3 вырабатываются оценки доплеровской разности фаз  и
и  отраженных сигналов за T1 и T2 соответственно. Полученные оценки доплеровской разности фаз
отраженных сигналов за T1 и T2 соответственно. Полученные оценки доплеровской разности фаз  и
и  с помощью управляемых фазовращателей 4 и 5 вводятся в фазы сигналов первого и третьего периодов повторения. В преобразователе оценок разности фаз 6 формируется переменный весовой коэффициент, равный
с помощью управляемых фазовращателей 4 и 5 вводятся в фазы сигналов первого и третьего периодов повторения. В преобразователе оценок разности фаз 6 формируется переменный весовой коэффициент, равный  Указанный весовой коэффициент умножается в перемножителе 8 на комплексную амплитуду эхо-сигналов второго зондирования. Откорректированные сигналы как по фазе (первое и третье зондирование), так и по амплитуде (второе зондирование) подаются на выходной весовой сумматор 7, в котором они алгебраически суммируются как с единичным весом (первое и третье зондирование), так и весом "-2" (второе зондирование).
Указанный весовой коэффициент умножается в перемножителе 8 на комплексную амплитуду эхо-сигналов второго зондирования. Откорректированные сигналы как по фазе (первое и третье зондирование), так и по амплитуде (второе зондирование) подаются на выходной весовой сумматор 7, в котором они алгебраически суммируются как с единичным весом (первое и третье зондирование), так и весом "-2" (второе зондирование).
Считая для простоты эхо-сигналы нефлюктуирующими по амплитуде и равными  а начальную их фазу равной нулю и радиальную скорость объекта, от которого они отразились Vr, представим комплексные амплитуды
а начальную их фазу равной нулю и радиальную скорость объекта, от которого они отразились Vr, представим комплексные амплитуды 
 и
и  эхо-сигналов трех зондирований для одного i-того элемента дальности в следующем виде
эхо-сигналов трех зондирований для одного i-того элемента дальности в следующем виде

где  λ - длина волны РЛС, i=1, …, N
λ - длина волны РЛС, i=1, …, N
Оценка  на выходе первого измерителя разности фаз 2, который, например, производит оценку по методу максимального правдоподобия (см. Бартенев В.Г. Вопросы специальной радиоэлектроники, сер. РЛТ, вып. 15, 1981 г., стр. 47) будет иметь вид
на выходе первого измерителя разности фаз 2, который, например, производит оценку по методу максимального правдоподобия (см. Бартенев В.Г. Вопросы специальной радиоэлектроники, сер. РЛТ, вып. 15, 1981 г., стр. 47) будет иметь вид
где  означают взятие мнимой и вещественной частей от комплексного произведения. Знак * означает комплексное сопряжение.
означают взятие мнимой и вещественной частей от комплексного произведения. Знак * означает комплексное сопряжение.
Суммирование в числителе и в знаменателе производится по N элементам дальности для протяженной по дальности помехи. Обычно N выбирается равной 4-8 элементам дальности, что позволяет получить хорошую точность оценки доплеровской разности фазы помехи. Для дискретной пассивной помехи, как и для цели, усреднение не производится. Аналогично на выходе второго измерителя разности фаз 3.

С помощью управляемого фазовращателей 4 и 5 производится фазовая коррекция сигналов первого и третьего зондирований
С помощью преобразователя оценок разности фаз 6 и перемножителя 8 производится амплитудная коррекция эхо-сигналов второго зондирования, т.е.

Таким образом фазы сигналов первого и третьего зондирований после коррекции совпадают с фазой сигналов второго зондирования.
После алгебраического суммирования сигналов в выходном весовом сумматоре получаем на выходе устройства

Откуда следует, что скоростная характеристика предлагаемого устройства, как и у прототипа, имеет вид  т.е. реализуется двукратное вычитание с большой зоной режекции пассивных помех. В предложенном устройстве полностью сохраняются разностно-временные свойства как у аналога, так и прототипа, но без перекрестного регулирования, свойственного как аналогу, так и прототипу. Действительно, скоростная характеристика, которая получилась, соответствует случаю прохождения полезного сигнала. При этом важно, что даже если в этом случае усреднение не производится, полезный сигнал компенсироваться не будет, так как доплеровские скорости целей, как правило, большие, в то же время дискретная целеподобная помеха с малой радиальной скоростью перемещения будет компенсироваться.
т.е. реализуется двукратное вычитание с большой зоной режекции пассивных помех. В предложенном устройстве полностью сохраняются разностно-временные свойства как у аналога, так и прототипа, но без перекрестного регулирования, свойственного как аналогу, так и прототипу. Действительно, скоростная характеристика, которая получилась, соответствует случаю прохождения полезного сигнала. При этом важно, что даже если в этом случае усреднение не производится, полезный сигнал компенсироваться не будет, так как доплеровские скорости целей, как правило, большие, в то же время дискретная целеподобная помеха с малой радиальной скоростью перемещения будет компенсироваться.
В отличие от прототипа, в котором осуществляется только фазовая коррекция отраженных сигналов, в предложенном устройстве используется еще и амплитудная коррекция. Преимущество амплитудной коррекции проявляется при рассмотрении реальной флюктуирующей помехи. Межпериодные флюктуации эхо-сигналов характеризуются модулем межпериодного коэффициента корреляции R, который имеет величину 0,95-0,99. Более высокое подавление флюктуирующих эхо-сигналов пассивной помехи можно достичь, если учитывать модуль межпериодного коэффициента корреляции.
В предлагаемом устройстве с помощью амплитудной коррекции производится учет модуля межпериодного коэффициента корреляции. Формирование весового коэффициента, равного  при выборе T1 и T2, отличающихся на несколько процентов для реализации разностно-временной скоростной характеристики, как раз и приводит к тому, что значение весового коэффициента получается порядка 0,95÷0,99, т.е. учитывается как бы модуль межпериодного коэффициента корреляции помехи. Это и приводит к дополнительному повышению эффективности подавления пассивных помех.
при выборе T1 и T2, отличающихся на несколько процентов для реализации разностно-временной скоростной характеристики, как раз и приводит к тому, что значение весового коэффициента получается порядка 0,95÷0,99, т.е. учитывается как бы модуль межпериодного коэффициента корреляции помехи. Это и приводит к дополнительному повышению эффективности подавления пассивных помех.
Все вышесказанное справедливо и при обработке в устройстве произвольного числа импульсов (не только трех). В этом случае на входе устройства следует применить девобулятор принимаемой последовательности импульсов (см. Ширман Я.Д. Теоретические основы радиолокации, М., "Сов. радио", 1970 г., стр. 480). Это позволяет использовать одинаковые элементы памяти (например, линии задержки или ПЗС регистра). При цифровой реализации устройства обработка произвольного числа импульсов в пачке возможна и без девобулятора на входе устройства. В этом случае необходимо в качестве элементов памяти использовать ОЗУ с произвольной выборкой.
Рассмотрим более подробно цифровой вариант реализации предлагаемого устройства как наиболее предпочтительный. В этом случае предполагается, что вход устройства подключен к устройству формирования квадратурных составляющих (фазовым детектором) с последующей их оцифровкой в АЦП, на чертежах не показанных.
Элементы памяти 1 представляют собой ОЗУ с произвольной выборкой, объем которых должен быть выбран с учетом разрядности двух квадратурных составляющих исходя из наибольшей длительности вобулированных периодов. Реализация измерителя разности фаз 2 и 3 представлена на фиг. 3. На комплексный перемножитель 11 подаются коды квадратурных составляющих (показаны в виде шин) задержанных и незадержанных сигналов. В комплексном перемножителе 11, который состоит из их обычных перемножителей, сумматора и вычитателя на двух выходах получаются такие две составляющие (мнимая и реальная) комплексного произведения

где  - коды квадратурных составляющих задержанных и незадержанных эхо-сигналов в j-том периоде повторения. Полученные вещественная и мнимая составляющие комплексного произведения усредняются в скользящем окне по дальности из N элементов в первом и втором усреднителях 12 и 13, выполненных в виде многоразрядных регистров с отводами, и сумматора, подключенного к отводам регистра, и подаются на два входа функционального преобразователя типа Arctg 14, выполненного на ПЗУ в виде таблицы, в которой записаны коды разности фаз
- коды квадратурных составляющих задержанных и незадержанных эхо-сигналов в j-том периоде повторения. Полученные вещественная и мнимая составляющие комплексного произведения усредняются в скользящем окне по дальности из N элементов в первом и втором усреднителях 12 и 13, выполненных в виде многоразрядных регистров с отводами, и сумматора, подключенного к отводам регистра, и подаются на два входа функционального преобразователя типа Arctg 14, выполненного на ПЗУ в виде таблицы, в которой записаны коды разности фаз 
Первый и второй управляющие фазовращатели 4 и 5 представлены на фиг. 4. На вход управления цифрового управляемого фазовращателя подается код  который преобразуется в функциональных преобразователях 15 и 16 типа cos и sin, выполненных на ПЗУ. Коды
который преобразуется в функциональных преобразователях 15 и 16 типа cos и sin, выполненных на ПЗУ. Коды  и
и  с выходов ПЗУ подаются на комплексный умножитель 17, на два других входа которых подаются квадратурные составляющие (показаны в виде шины), корректируемых по фазе кодов, т.е. на выходе управляемого фазовращателя получаются квадратурные составляющие (показаны в виде шины). Причем на выходе первого управляемого фазовращателя 4 получаются откорректированные коды
с выходов ПЗУ подаются на комплексный умножитель 17, на два других входа которых подаются квадратурные составляющие (показаны в виде шины), корректируемых по фазе кодов, т.е. на выходе управляемого фазовращателя получаются квадратурные составляющие (показаны в виде шины). Причем на выходе первого управляемого фазовращателя 4 получаются откорректированные коды 
а на выходе второго управляемого фазовращателя 5 получаются коды
На фиг. 2 представлена структурная схема преобразователя оценок разности фаз 6, в котором формируется переменный весовой коэффициент. На входы "а" и "б" подаются оценки разности фаз смежных периодов повторения  и
и  С помощью вычитателя 9 получается код разности
С помощью вычитателя 9 получается код разности  который на выходе функционального преобразователя 10 преобразуется в
который на выходе функционального преобразователя 10 преобразуется в  Переменный весовой коэффициент
Переменный весовой коэффициент  умножается на коды квадратурных составляющих
умножается на коды квадратурных составляющих  в перемножителе 8, что дает откорректированные коды
в перемножителе 8, что дает откорректированные коды
Квадратурные составляющие откорректированных кодов подаются на выходной весовой сумматор 7, который представляет собой алгебраический сумматор вычитатель. При этом, как следует из фиг. 5, коды эхо-сигналов, откорректированные по фазе, складываются в 19 и из их суммы вычитается код амплитудно-корректированных эхо-сигналов, умноженный в 18 на два. Умножение на два в 18 осуществляется сдвигом входных кодов влево на один разряд. Ввиду громоздкости квадратурного представления, структурная схема на фиг. 5 (как и все остальные структурные схемы) содержит шины данных. При этом арифметические операции в квадратурах заменены эквивалентными операциями с комплексными числами.
Сопоставительный анализ эффективности предложенного устройства и прототипа производился по нормированному коэффициенту подавления
где Pвых - мощность помехи на выходе СДЦ,
Pвх - мощность помехи на входе СДЦ.
Черта сверху означает статистическое усреднение.
Учитывая то, что для прототипа

а для предлагаемого устройства

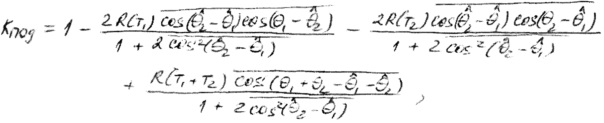
получаем коэффициенты подавления для прототипа

для предлагаемого устройства
где  - модули межпериодных коэффициентов корреляции за Т1, Т2 и 2Т=T1+T2
- модули межпериодных коэффициентов корреляции за Т1, Т2 и 2Т=T1+T2
Приближенно будем считать 
Выражения для средних значений косинусов найдем в приближении гауссовой аппроксимации распределения вероятности  (см. Абрамович Ю.И. Радиотехника и электроника, 1978 г., 23, 7, стр. 1394). Окончательные выражения для коэффициентов подавления сравниваемых систем имеют следующий вид
(см. Абрамович Ю.И. Радиотехника и электроника, 1978 г., 23, 7, стр. 1394). Окончательные выражения для коэффициентов подавления сравниваемых систем имеют следующий вид

для прототипа

для предлагаемого устройства
где  - дисперсия оценки разности фазы зависит как от корреляционных свойств помехи, так и от числа независимых элементов усреднения N.
- дисперсия оценки разности фазы зависит как от корреляционных свойств помехи, так и от числа независимых элементов усреднения N.
Приближенно можно считать (см. Бартенев В.Г. Радиотехника и электроника. 1981 г., 26, 2, 356 стр.)
Результаты расчетов коэффициентов подавления сведены в таблицу. Рассматривалась пассивная помеха с гауссовой формой спектра и доплеровским смещением, обусловленным движением 
 - средняя частота повторения РЛС,
- средняя частота повторения РЛС,  коэффициент вобуляции равен 10%.
коэффициент вобуляции равен 10%.
Число усредняемых элементов дальности задавалось равным N=1, 2, 4, 8. Относительная ширина спектра флюктуаций помехи по уровню -20 дБ составляла  и
и 

Как следует из таблицы, выигрыш в коэффициенте подавления у предложенного устройства по сравнению с прототипом составляет 2-4 дБ для дискретных медленно движущихся пассивных помех (N=1) и 6-8 дБ для протяженных медленно движущихся пассивных помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое устройство селекции движущихся целей | 1984 |
|
SU1841294A1 |
| Устройство подавления эхо-сигналов движущихся дипольных отражателей и метеообразований | 1983 |
|
SU1841284A1 |
| Устройство селекции движущихся целей для наземного когерентно-импульсного радиолокатора | 1983 |
|
SU1841286A1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ АДАПТИВНОГО РЕЖЕКТИРОВАНИЯ ПОМЕХ | 2015 |
|
RU2582871C1 |
| АДАПТИВНЫЙ РЕЖЕКТОРНЫЙ ФИЛЬТР | 2015 |
|
RU2579998C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2007 |
|
RU2350981C1 |
| Двухчастотное устройство селекции движущихся целей | 1981 |
|
SU1841282A2 |
| Двухканальный преобразователь допплеровских частот эхо-сигналов для двухчастотной локационной станции | 1982 |
|
SU1841290A1 |
| Селектор эхо-сигнала движущихся целей для двухчастотного радиолокатора | 1984 |
|
SU1841292A1 |
| Адаптивная двухчастотная разностно-фазовая система селекции движущихся целей | 1982 |
|
SU1841283A1 |

Изобретение относится к области радиолокации и может быть использовано в РЛС с вобулированной последовательностью излучения импульсов. Достигаемый технический результат - повышение эффективности подавления медленно движущихся пассивных помех. Указанный результат достигается за счет того, что устройство содержит определенным образом соединенные между собой блок задержки на первый период повторения, блок задержки на второй период повторения, два измерителя разности фаз, два управляемых фазовращателя, блок вычитания, вычислитель косинуса, умножитель на два, сумматор и перемножитель. 5 ил., 1 табл.
Устройство селекции движущихся целей для радиолокатора с вобуляцией периода повторения, содержащее блок задержки на первый период повторения, блок задержки на второй период повторения, два измерителя разности фаз, два управляемых фазовращателя, последовательно соединенные блок вычитания и вычислитель косинуса, умножитель на два и сумматор, инверсный вход которого соединен с выходом умножителя на два, причем соединенные между собой входы блока задержки на второй период повторения первого измерителя разности фаз и первого управляемого фазовращателя являются входом устройства селекции движущихся целей, выход блока задержки на второй период повторения соединен со вторым входом первого измерителя разности фаз, с первым входом второго измерителя разности фаз и через блок задержки на первый период повторения со вторым входом второго измерителя разности и с входом второго управляемого фазовращателя, выходы первого и второго управляемых фазовращателей соединены с прямыми входами сумматора, а выходы первого и второго измерителей разности фаз соединены с входами блока вычитания, отличающееся тем, что, с целью повышения эффективности подавления медленно движущихся пассивных помех, введен перемножитель, причем выход блока задержки на второй период повторения и выход вычислителя косинуса соединены через перемножитель с входом умножителя на два и выходы первого и второго измерителей разности фаз соединены соответственно с управляющими входами первого и второго управляемых фазовращателей.
| Вопросы судостроения, серия РЛТ, вып | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| , с | |||
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |

