(54) СПОСОБ КОНТРОЛЯ МЕСТОНАХОЖДЕНИЯ ПОДВИЖНОГО
ОБЪЕКТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания гидроэлементов при динамических нагрузках | 1981 |
|
SU1071829A1 |
| СПОСОБ ТРАНСПОРТИРОВКИ ГАЗА ПО МАГИСТРАЛЬНОМУ ГАЗОПРОВОДУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2476761C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОЧИСТНЫХ И ДИАГНОСТИЧЕСКИХ ОБЪЕКТОВ В ТРУБОПРОВОДЕ | 2005 |
|
RU2293909C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ АВТОМАТИЗИРОВАННАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА С НИЗКОНАПОРНЫМИ ДОЖДЕВАЛЬНЫМИ МАШИНАМИ КРУГОВОГО ДЕЙСТВИЯ | 2009 |
|
RU2402199C1 |
| Система управления и аварийной защиты многоопорной дождевальной машины | 1985 |
|
SU1360653A1 |
| ЦЕНТРАЛЬНАЯ СТАНЦИЯ СИСТЕМЫ РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2006 |
|
RU2311737C1 |
| СПОСОБ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445594C1 |
| МОЛОТ МАА ДЛЯ РАЗРУШЕНИЯ НЕГАБАРИТОВ ГОРНЫХ ПОРОД | 2002 |
|
RU2237808C2 |
| СПОСОБ ДИСПЕРГИРОВАНИЯ ЖИДКОСТИ В СТРУЕ ДИСПЕРСИОННОЙ ВОЗДУШНОЙ СРЕДЫ В АЭРОЗОЛЬ И МОБИЛЬНЫЙ ГЕНЕРАТОР АЭРОЗОЛЯ РЕГУЛИРУЕМОЙ МНОГОМЕРНЫМ ВОЗДЕЙСТВИЕМ ДИСПЕРСНОСТИ, СМЕСИТЕЛЬ, КЛАПАН СОГЛАСОВАНИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА (ВАРИАНТЫ) | 2011 |
|
RU2489201C2 |
| СПОСОБ ЭКСТРЕННОЙ ДИАГНОСТИКИ ТРУБОПРОВОДОВ ВЫСОКОГО ДАВЛЕНИЯ | 2010 |
|
RU2442072C1 |
1
Изобретение предназначено для дистанционного контроля местонахождения, скорости движения подвижных объектов, в частности выемочных машин, с помощью средств гидро и пневмоавтоматики. Способ можеУ найти применение в гидравлических системах управления угледобывающими комплексами и агрегатами, в нефтяной, газовой, машиностроительной и других отраслях промышленности.
Известны способы контроля местонз ождения, осуществляемые с помощью средств электроавтоматики. Например, известен способ контроля местонахождения выемочной машины, где путь определяют по числу электрических импульсов, зависящих от зафиксированного средствами дефектоскопии числа стыков между секциями рассредоточенного вдоль линии забоя конвейера fl .
Известный способ имеет низкую точность, большую сложность,увеличивает габариты объекта, требует пыле и искробезопасного выИолнения устрой,ства, реализующего способ и т.д.
, Изестен также способ контроля местонахождения подвижного объекта,основанный на создании в трубопроводе импульсов давления путем взаимодействия объекта с датчиками, Установленными в контрольных точках трассы его движения, и регистрации коли10чества импульсов 2. Недостатки этого способа заклю- чаются в том, что в исходном состоянии контрольный трубопровод соединен с источником давления и постоянно
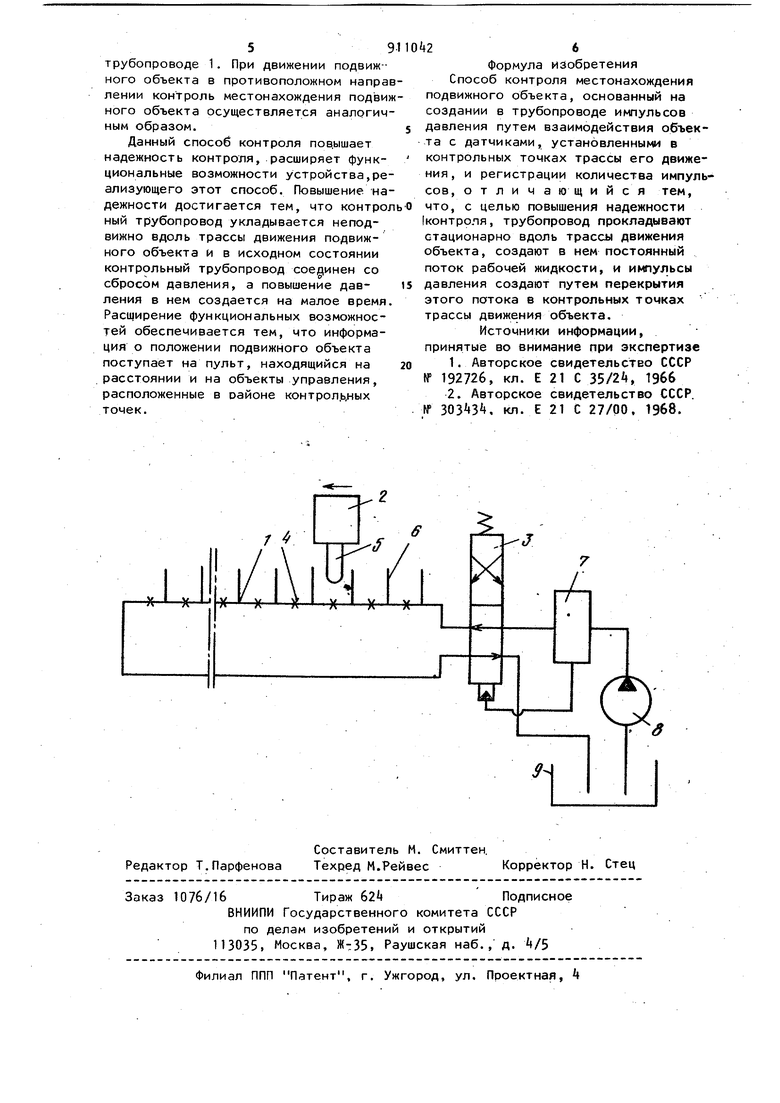
15 находится под давлением, что повышает требования к герметичности уплотнительных узлов, технологии изготовления. Кроме того, при срабатывании датчиков жидкость из трубопрово20да сбрасывается непосредственно на почву, что ухудшает санитарно-гигиенические условия окружающей среды, повышает требования по безопасности обслуживания, при этом контрольный трубопровод присоединен одним концом к подвижному объекту, что может приводить к его разрывам и быстрому выходу из строя. Таким образом, известным устройством не обеспечивается надежный контроль местонахождения объекта. Цель изобретения - повышение наде ности контроля местонахождения. Поставленная цель достигается тем что трубопровод прокладывают стационарно вдоль трассы движения объекта, создают в нем постоянный поток рабочей жидкости, и импульсы давлен ия создают путем перекрытия этого потока в контрольных точках трассы двиiжения объекта. На чертеже изображена схема контроля местонахождения подвижного объе та. Неподвижный контрольный трубопровод 1 прокладывается вдоль трассы дв жения подвижного объекта 2. Концы трубопровода 1 соединены с распределителем 3, изменяющим направление движения потока жидкости в трубопроводе в зависимости от направления дв жения объекта. В трубопровод 1 в контрольных точках встроены последовательно расположенные заслонки (дат чики) 4, взаимодействующие с подвижным объектом 2 посредством укрепленного на нем упора 5. Контрольный тру бопровод 1 снабжен отводами 6, разме щенными между заслонками 4 и соединяющими контрольный трубопровод 1 с другими объектами управления, не показанными на чертеже. Пульт 7 включен в контрольный трубопровод 1 между распределителем 3 и источником да ления 8. Распределитель 3 соединен с пультом 7 истомйиком давления 8 и сбросом давления 9 (сливным баком или атмосферой). Источником давлени может служить насосная станция, компрессор и др. Контроль местонахождения подвижного объекта осуществляется следующи образом. В контрольный трубопровод 1 подается рабочая среда из источника давления 8. Направление движения потока рабочей среды в трубопроводе 1 устанавливается распределителем 3, причем направление движения потока рабочей среды должно совпадать с направлением движения подвижного объекта 2. В ис ходном положении все заслонки 4 выдвинуты из трубопровода 1, и источник давления соединяется через трубопровод непосредственно со сбросом давления 9, т.е. жидкость свободно перетекает от источника давления на слив. А в трубопроводе 1 поддерживает(;я избыточное давление, необходимое для поддержания заслонок k в выдвинутом положении. При движении в заданном направлении, указанном на чертеже стрелкой, подвижный объект 2 своим упором 5 воздействует на заслонки 4, которые вдвигаются в трубопровод 1, перекрывая его поперечное сечение и, следовательно, поток рабочей среды в трубопроводе 1. В результате этого движение рабочей среды в трубопроводе прекращается и на участке трубопровода 1 между источником давления В и перекрытой заслонкой 4 создается гидроудар. Давление рабочей среды на этом участке повышается. Повышение давления фиксируется гидроэлементами на пульте управления или через соответствующий отвод 6 объектом управления , например секцией механизированной крепи, управляемой выемочной мauJинoй. Остальной участок трубопровода 1 в это время остается соединенным со сбросом давления. При дальнейшем движении упор 5 подвижного объекта 2 отходит от заслонки 4 и она выталкивается из контрольного трубопровода 1 в исходное, выдвинутое положение. При этом давление в контрольном трубопроводе вновь падает до величины, соответствующей; давлению в исходном положении, и в трубопроводе вновь создается поток рабочей среды от источника давления и сбросу давления. Это падение давления также фиксируется гидроэлементами на пульте, 7 или объекте управления. При дальнейшем движении подвижного объекта упор 5 воздействует на следующие засл§)нки, создавая в трубопроводе 1 ряд последовательно чередующихся гидроударов и падений давления. По количеству гидроударов определяется местонахождение подвижного объекта, а по длительности сохранения повышенного давления или паузы между гидроударами при воздействии упора 5 на за-слонку Ц определяется скорость движения выемочной машины. Когда подвижный объект достигает крайнего положения, распределитель 5 переключается и изменяет направление потока рабочей среды в контрольном
трубопроводе 1. При движении подвижного объекта в противоположном направлении контроль местонахождения подвижного объекта осуществляется аналогичным образом.
Данный способ контроля повышает надежность контроля, расширяет функциональные возможности устройства,реализующего этот способ. Повышение надежности достигается тем, что контрол ный трубопровод укладывается неподвижно вдоль трассы движения подвижного объекта и в исходном состоянии контрольный трубопровод сое§1инен со сбросом давления, а повышение давления в нем создается на малое время. Расширение функциональных возможностей обеспечивается тем, что информация о положении подвижного объекта поступает на пульт, находящийся на расстоянии и на объекты управления, расположенные в районе контрольных точек.
Формула изобретения Способ контроля местонахождения подвижного объекта, основанный на создании в трубопроводе импульсов давления путем взаимодействия объекта с датчиками, установленными в контрольных точках трассы его движения , и регистрации количества импулсов, отличающийся тем, что, с целью повышения надежности (контроля, трубопровод прокладывают стационарно вдоль трассы движения объекта, создают в нем постоянный поток рабочей жидкости, и импульсы давления создают путем перекрытия этого патока в контрольных точках трассы движения объекта.
Источники информации, принятые во внимание при экспертизе
