(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЭЛЛИПСНЫХ ОТВЕРСТИЙ
1
Изобретение относится к информационно-измерительной технике и может найти применение, например в системах автоматизированного контроля и управления технологическими процессами в промышленности.
Известно устройство для измерения диа- 5 метров отверстий, содержащее корпус с неподвижным измерительным наконечником и осью, индикатор, рычаг с подвижным измерительным наконечником 1.
Недостатком прибора является низкая .Q производительность контроля, обусловленная необходимостью непрерывной регистрации информации для снятия характеристик отверстия.
Наиболее близким к предлагаемому ляется устройство для измерения параметров ЭЛЛИПСНЫХ отверстий, содержащее зонд с расположенными на нем во взаимноперг пендикулярных плоскостях двумя датчиками радиальных перемещений, коммутатор, подключенный входами к выходам соответ.ству- 20 ющих датчиков радиальных перемещений, аналого-цифровой преобразователь (АЦП), связанный с выходом коммутатора, два основных регистра, первые входы которых
подключены к выходу АЦП, блок формирования результатов, подключенный соответствующими входами к выходам основных регистров, регистрирующий блок, подключенный к выходу блока формирования результата 2.I
Недостатком устройства является сравнительно невысокая точность измерений, обусловленная недостаточной разрешающей способностью датчиков при фиксации осей эллипса.
Цель изобретения - повышение точности измерений.
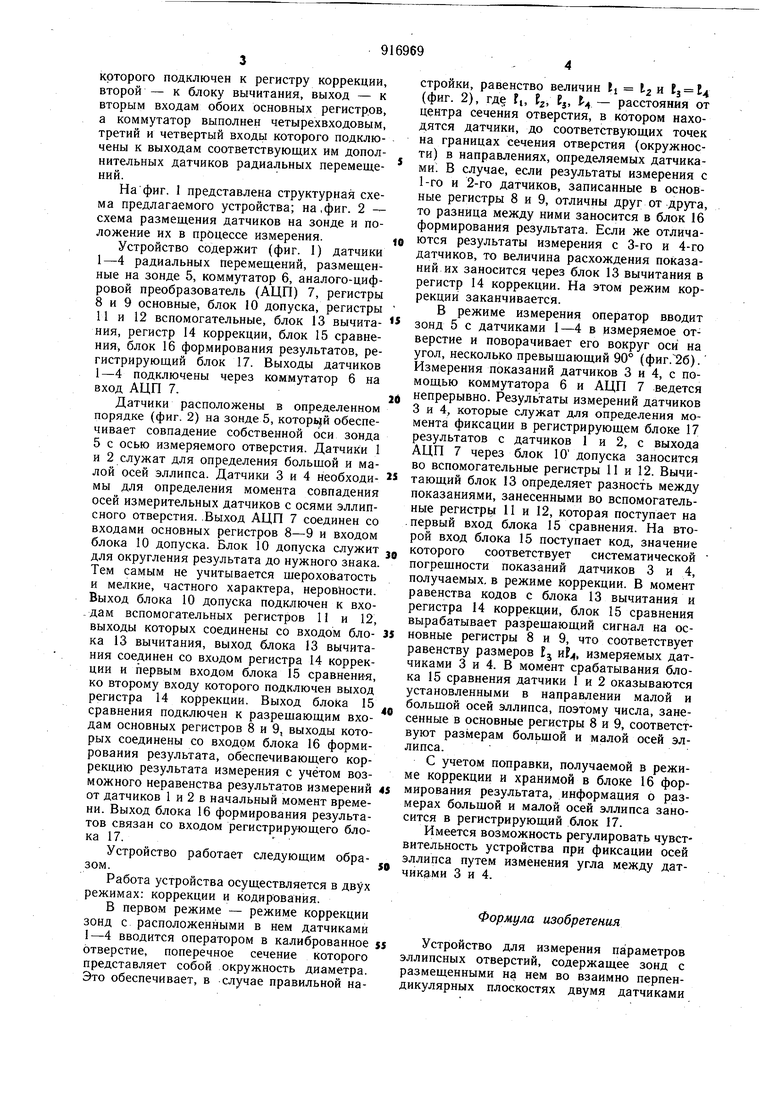
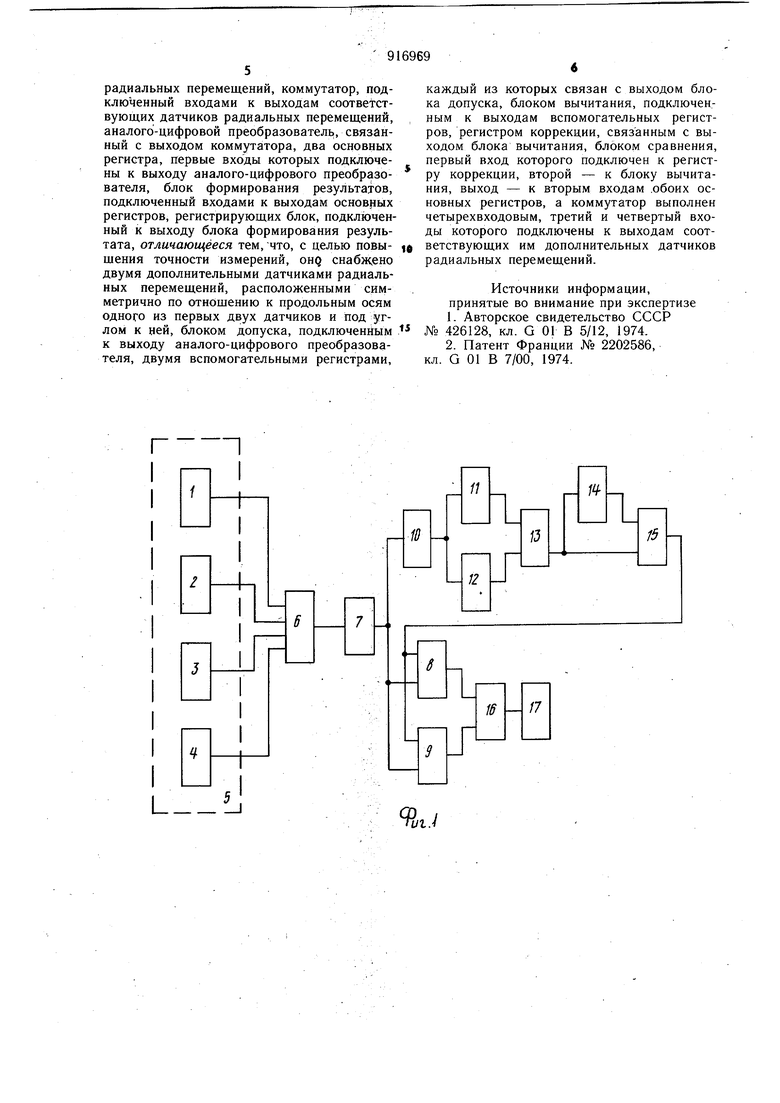
Поставленная цель достигается тем, что устройство снабжено двумя дополнительными датчиками, радиальных перемещений расположенными симметрично по отношению к продольной оси одного из первых двух датчиков и под углом к ней, блоком допуска, подключенным к выходу АЦП, двумя вспомогательными регистрами, каждый из которых связан с выходом блока допуска, блоком вычитания, подключенным к выходам вспомогательных регистров, регистром коррекции, связанным с выходом блока вычитания, блоком сравнения, первый вход которого подключен к регистру коррекции, второй - к блоку вычитания, выход - к вторым входам обоих основных регистров, а коммутатор выполнен четырехвходовым, третий и четвертый входы которого подключены к выходам соответствующих им дополнительных датчиков радиальных перемещений. На фиг. 1 представлена структурная схема предлагаемого устройства; на,фиг. 2 - схема размещения датчиков на зонде и положение их в процессе измерения. Устройство содержит (фиг. 1) датчики 1-4 радиальных Перемещений, размещенные на зонде 5, коммутатор 6, аналого-цифровой преобразователь (АЦП) 7, регистры 8 и 9 основные, блок 10 допуска, регистры 11 и 12 вспомогательные, блок 13 вычитания, регистр 14 коррекции, блок 15 сравнения, блок 16 формирования результатов, регистрирующий блок 17. Выходы датчиков 1-4 подключены через коммутатор 6 на вход АЦП 7. Датчики расположены в определенном порядке (фиг. 2) на зонде 5, которой обеспечивает совпадение собственной оси зонда 5 с осью измеряемого отверстия. Датчики 1 и 2 служат для определения больщой и малой осей эллипса. Датчики 3 и 4 необходимы для определения момента совпадения осей измерительных датчиков с осями эллипсного отверстия. .Выход АЦП 7 соединен со входами основных регистров 8-9 и входом блока 10 допуска. Блок 10 допуска служит для округления результата до нужного знака. Тем самым не учитывается щероховатость и мелкие, частного характера, неровности. Выход блока 10 допуска подключен к вхо-дам вспомогательных регистров 11 и 12, выходы которых соединены со входом блока 13 вычитания, выход блока 13 вычитания соединен со входом регистра 14 коррекции и первым входом блока 15 сравнения, ко второму входу которого подключен выход регистра 14 коррекции. Выход блока 15 сравнения подключен к разрещающим входам основных регистров 8 и 9, выходы которых соединены со входом блока 16 формирования результата, обеспечивающего коррекцию результата измерения с учётом возможного неравенства результатов измерений ОТ датчиков 1 и 2 в начальный момент времени. Выход блока 16 формирования результатов связан со входом регистрирующего блока 17. Устройство работает следующим образом. Работа устройства осуществляется в двух режимах: коррекции и кодирования. В первом режиме - режиме коррекции зонд с расположенными в нем датчиками 1-4 вводится оператором в калиброванное отверстие, поперечное сечение которого представляет собой окружность диаметра. Это обеспечивает, в случае правильной настройки, равенство величин EI t и з Ч (фиг. 2), где 1, Iz Ч 4- расстояния от центра сечения отверстия, в котором находятся датчики, до соответствующих точек на границах сечения отверстия (окружности) в направлениях, определяемых датчикамк. в случае, если результаты измерения с 1-го и 2-го датчиков, записанные в основные регистры 8 и 9, отличны друг от друга, то разница между ними заносится в блок 16 формирования результата. Если же отличаются результаты измерения с 3-го и 4-го датчиков, то величина расхождения показаний их заносится через блок 13 вычитания в регистр 14 коррекции. На этом режим коррекции заканчивается. В режиме измерения оператор вводит зонд 5 с датчиками I-4 в измеряемое отверстие и поворачивает его вокруг оси на угол, несколько превыщающий 90° (фиг.2б). Измерения показаний датчиков 3 и 4, с помощью коммутатора 6 и АЦП 7 ведется непрерывно. Результаты измерений датчиков 3 и 4, которые служат для определения момента фиксации в регистрирующем блоке 17 результатов с датчиков 1 и 2, с выхода АЦП 7 через блок 10 допуска заносится во вспомогательные регистры 11 и 12. Вычитающий блок 13 определяет разность между показаниями, занесенными во вспомогательные регистрь II и 12, которая поступает на первый вход блока 15 сравнения. На второй вход блока 15 поступает код, значение которого соответствует систематической погрещности показаний датчиков 3 и 4, получаемых, в режиме коррекции. В момент равенства кодов с блока 13 вычитания и регистра 14 коррекции, блок 15 сравнения вырабатывает разрещающий сигнал на основные регистры 8 и 9, что соответствует равенству размеров j иЕ, измеряемых датчиками 3 и 4. В момент срабатывания блока 15 сравнения датчики 1 и 2 оказываются установленными в направлении малой и больщой осей эллипса, поэтому числа, занесенные в основные регистры 8 и 9, соответствуют размерам больщой и малой осей эллипса. С учетом поправки, получаемой в режиме коррекции и хранимой в блоке 16 формирования результата, информация о размерах больщой и малой осей эллипса заносится в регистрирующий блок 17. Имеется возможность регулировать чувствительность устройства при фиксации осей эллипса путем изменения угла между датчиками 3 и 4. Формула изобретения Устройство для измерения параметров эллипсных отверстий, содержащее зонд с размещенными на нем во взаимно перпендикулярных плоскостях двумя датчиками
радиальных перемещений, коммутатор, подключенный входами к выходам соответствующих датчиков радиальных перемещений, аналого-цифровой преобразователь, связанный с выходом коммутатора, два основных регистра, первые входы которых подключены к выходу аналого-цифрового преобразователя, блок формирования результатов, подключенный входами к выходам основных регистров, регистрирующих блок, подключенный к выходу блока формирования результата, отличающееся тем, что, с целью повыщения точности измерений, OHQ снабжено двумя дополнительными датчиками радиальных перемещений, расположенными симметрично по отношению к продольным осям одного из первых двух датчиков и под углом к ней, блоком допуска, подключенным к выходу аналого-цифрового преобразователя, двумя вспомогательными регистрами.
каждый из которых связан с выходом блока допуска, блоком вычитания, подключенным к выходам вспомогательных регистров, регистром коррекции, связанным с выходом блока вычитания, блоком сравнения, первый вход которого подключен к регистру коррекции, второй - к блоку вычитания, выход - к вторым входам .обоих основных регистров, а коммутатор выполнен четырехвходовым, третий и четвертый входы которого подключены к выходам соответствующих им дополнительных датчиков радиальных перемещений.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 426128, кл. G 01 В 5/12, 1974.
2.Патент Франции № 2202586, кл. G 01 В 7/00, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров круглых отверстий | 1981 |
|
SU974104A1 |
| Устройство для измерения параметровэллипСНОгО ОТВЕРСТия | 1979 |
|
SU846987A1 |
| Устройство для контроля и управления технологическими процессами испытаний и тренировки фотоэлектронных умножителей | 1988 |
|
SU1517041A1 |
| Устройство для измерения температуры | 1984 |
|
SU1281921A1 |
| Устройство для контроля и регулирования параметров | 1984 |
|
SU1249491A1 |
| Устройство для измерения температуры | 1988 |
|
SU1672237A1 |
| ЦИФРОВОЙ ГИДРАВЛИЧЕСКИЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ БУРЕНИЯ | 1995 |
|
RU2087702C1 |
| Устройство для измерения электромагнитных параметров объемных экранов | 1987 |
|
SU1583981A1 |
| Способ итерационной коррекции аналого-цифрового преобразования | 1989 |
|
SU1732468A1 |
| Система контроля параметров | 1984 |
|
SU1190364A1 |
п
Г
I
11
LT
1,
15
/3
LT
п
17
W
UP
Ф.г.У
Ь)
гг
