(54) ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ 
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство к балансировочному станку | 1977 |
|
SU658418A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1270595A1 |
| Измерительное устройство к балансировочному станку | 1979 |
|
SU911187A2 |
| Измерительное устройство к балансировочному станку | 1973 |
|
SU694784A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Измерительное устройство к балансировочному станку | 1974 |
|
SU560150A1 |
| Измерительное устройство к балансировочному станку | 1981 |
|
SU981834A1 |
| Измерительное устройство к балансировочному станку | 1978 |
|
SU746227A2 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1259118A1 |
Изобретение относится к балансировочной технике и может быть использовано в балансировочных станках при змерении дисбаланса роторов в косоугольной системе координат.
Известно измерительное устройство к балансировочному станку, содержащее генератор опорных сигналов, последовательно соединенные датчик дисбаланса, усилитель и два канала измерения проекций дисбаланса, каждый из которых выполнен в виде фазового детектора объединенных входами с его выходом блока измерения и модулятора, и реле с переключающим контактом, подвижный контакт которого связан с выходом модулятора, а вторые входы фазовых детекторов и модуляторов связаны с соответствующими выходами генератора опорных сигналов. Устройство обеспечивает измерение дисбаланса в прямоугольной системе координат 1.
Недостатком данного устройства является то, что для измерения в косоугольной системе координат требуется перерасчет из прямоугольной в косоугольную систему кос(рдинат, что требует от оператора на станке больших затрат времени.
Наиболее близkим по технической сущности к изобретению является измерительное устройство к балансировочному станку, содержащее генератор опорных сигналов, генератор модулирующего сигнала, датчик дисбаланса, связанный с ним усилитель, три канала измерения проекций дисбаланса , каждый из KOTOjxjx выполнен
10 в виде двух фазовых детекторов, блока измерения, модулятора и реле с переключающим контактом, подвижный контакт которого связан с входом блока измерения, а неподвижные со15ответственно размыкающий - с выходом первого фазового детектора, а замыкающий - с выходом второго фазового детектора, входы модуляторов, связаны с выходами генератора моду20лирующего сигнала, первые входы фазовых детекторов объединены с выходами усилителя, а вторые связаны с соответствующими выходами генератора опорных сигналов. В устройстве при25менено поляризованное реле. Устройство производит замер дисбаланса в косоугольной (120) системе координат 2.
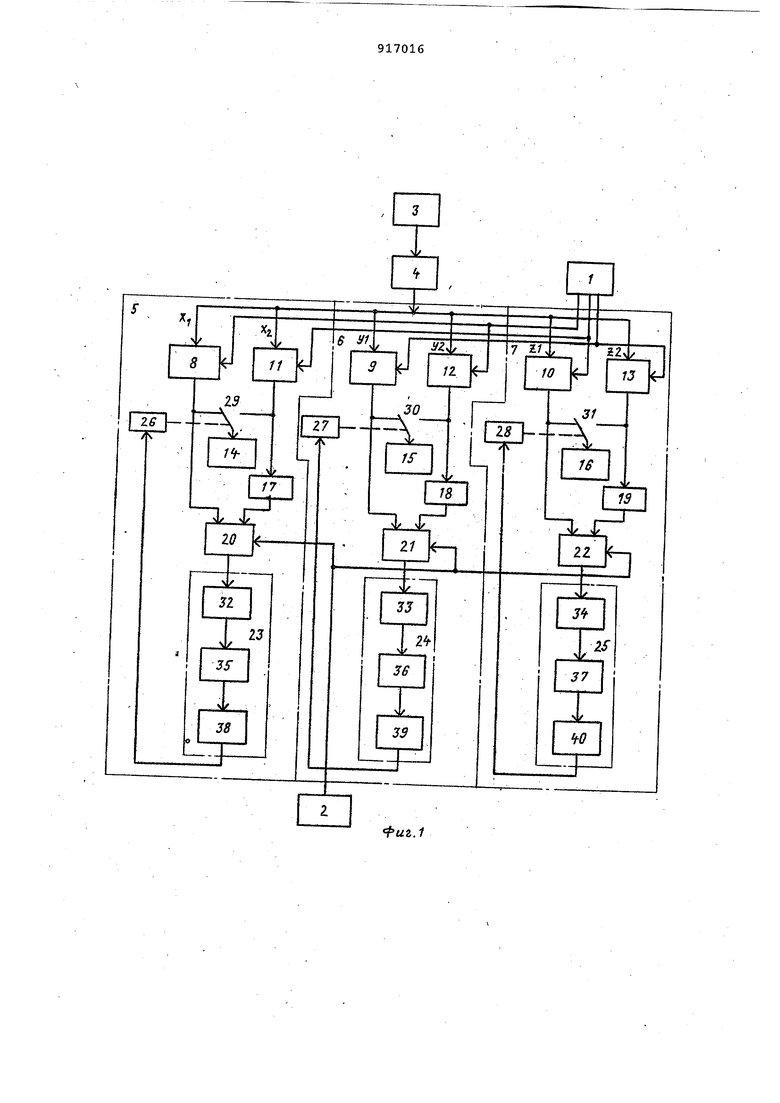
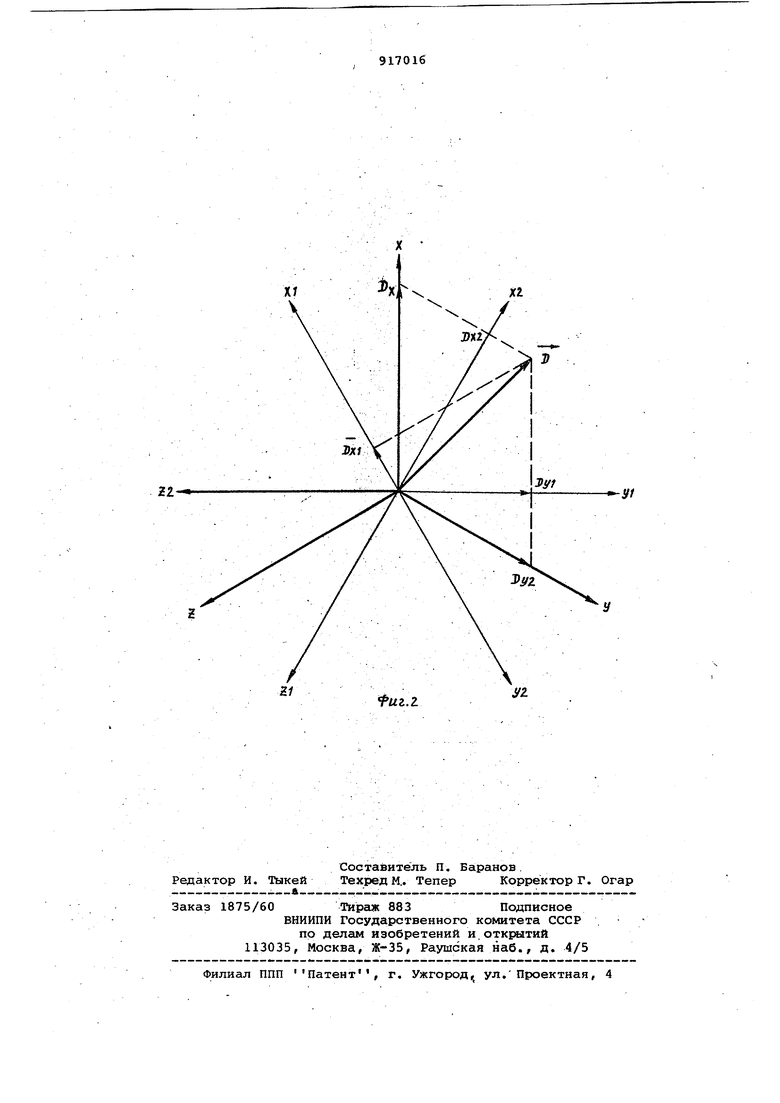
Недостатком такого устройства ляются ошибки, возникающие при срави действительложнойной проекций дисбаланса одной координаты. Это сравнение производитс с помощью поляризованного реле, обладающего большой зоной нечувствительности. Уровень же сравниваемых сигналов от замера к замеру может колебаться от дейятков милливольт до нескольких вольт. Может меняться и полярность сравниваемых сигналов. В этих условиях применение поляриэованного реле приводит к весьма ощутимым ошибкам измерения дисбалан са, что снижает точность балансиров ки ротора. Цель изобретения,- повышение точ иости балансировки. Поставленная цель достигается те что устройство снабжено в каждом ка нале измерения амплитудным детектором и KoiviMyтирующей цепью, вход которой связан с выходом модулятора, а выход - со входом реле, второй и третий входы модулятора связаны с выходом первого фазового детектора и выходом амплитудного детектора, а вход последнего соединен с выходо второго фазового детектора. На фиг. 1 приведена блок-схема устройства; на фиг. 2 - векторная диаграмма разложения вектора дисбаланса.в косоугольной системе координат. Устройство содержит генератор 1 опорных сигналов, генератор 2 модулируюгцего сигнала, датчик 3 дисбаланса, связанный с ним усилитель 4, три канала 5,6-и 7 измерения проекций дисбаланса по осям координат X, У и Z, каждый из которых выполнен -в виде двух фазовых детекторов 8(9,10) и 11(12,13), для разложения вектора дисбаланса D ротора на проекции по осям Х , Хд(У , У ; Z, Z блок 14(15,16)измерения, амплитудны детектор 17(18,19), последовательно соединенные модулятор 20(21,22), коммутирующую цепь 23(24,25) и реле 26(27,28) с переключающим контактом 29(30,31), подвижный контакт которо го связан с входом блока 14(15,16) измерения, а неподвижные, соответственно, размыкающий т с выходом первого фазового детектора 8(9,10) и вторым входом модулятора 20(21,22 а замыкающий - с выходом второго фа зового детектора 11(12,13) и входом амплитудного детектора 17 (18,19) , выход последнего соединен с третьим входом модулятора 20(21,22), модулирующие входы модуляторов 20-22, связаны с выходом генератора 2 модулирующего сигнала, первые входы фазовых детекторов 8-13 объединены с выходом усилителя 4, а вторые входы связаны, соответственно, фазовых детекторов 8 и 12 - с первым выходом генератора 1 опорных сигналов, фазовых детекторов 10 и 11 с его вторым выходом, а фазовых детекторов 9 и 13 - с его третьим выходом. . Каждая коммутирующая цепь 23(24, 25) выполнена в виде последовательно соединенных вьшрямителя 32(33,34), порогового элемента 35(36,37) и элемента 38(39,40) временной задержки. Устройство работает следующим образом. Сигнал датчика 3 дисбаланса, пропорциональный величине дисбаланса D ротора, усиливается до необходимой величины усилителем 4 и попадает на входы фазовых детекторов 8-13, каналов 5-7 измерения проекций дисбаланса D. Показанное на схеме соединение вторых управляющих входов фазовых детекторов 8-13 Х и У , У, и gj,/ 2 и й объясняется приведенной векторной диаграммой (фиг. 2)., т.е. У можно рассматривать как X/, и подавать на управляющий вход фазового детектора 9 выходное напряжение от той же обмотки генератора 1 опорных сигналов, что и для координаты Х, но только -в противофазе. Аналогично рассматриваются случаи для фазовых детекторов 9,13 и 11,10. Если дисбаланс D ротора, подлежащего балансировке, находится в секторе ХУ,тогда разложение дисбаланса D на проекции должны выполнять фазовые детекторы 11 и 9, которые управляются напряжениями с фазами Xj и У соответственно. Но, как показано на фиг. 2, положительные проекции получаются на выходах фазовых детекторов 8,11 и 9. Проекция на выходе фазового детектора 8 будет ложной и не измеряется устройством 14 измерения проекций канала 5. Поскольку выходные напряжения фазовых детекторов 8 и 11 не равны по величине, то на выход модулятора 20, управляемого с частотой 50 Гц, от генератора 2 модулирующего сигнала через амплитудный детектор 17 поступит разность вьгходных напряжений фазовых детекторов 8 и 11, и только в том случае, когда выход фазового детектора 11 будет больше, чем выход фазового детектора 8. В противном случае напряжение на выходе модулятора 20 будет равно нулю. Выходное напряжение модулятора 20, пропорциональное разности напряжений фазовых детекторов 8 и 11, поступает на вход выпрямителя 32, который преобразует прямоугольные импульсы выхода модулятора 25 в постоянное напряжение, пропорциональное разности выходных напряжений фазовых детекторов 8 и 11, которое поступает на вход порогового элемента 35. При незначительном превышении выходного сигнала фазового детектора 11 над 8 срабатывает пороговый элемент 35 и через промежуток времени. обусловленный выдержкой времени элемента 38 временной задержки, переключаются контакты 29 реле 26 выхо|да проекций на выходе координаты X, Выдержка времени нужна для отстройки рт случайных помех, так как чувстви-. тельность схемы настраивается довольно высокой для уменьшения погреш ностей в разложении на проекции. Следовательно, измерение дисбаланса 5, расплгоженного в секторе ХУ, будет произведено по ввлходному напряжению фазовых детекторов 11 и 9, что соответствует правильному решению постав ленной задачи. Аналогично описанному выше Производится сравнение проекций У и а каналов 6 и 7 измерения проекций дисбаланса , поэтому описание их работы не приведено. Применение в предлагаемом устройстве амплитудного детектора и коммутирующей цепи в каждом канале измере ния проекций дисбаланса обеспечивает «олее четкое по сравнению с прототии дейстложнойпом сравнение вительной проекций, позволяет повысить точность измерения дисбаланса ротора в косоугольной системе ко.ординат и, как следствие, повысить точность балансировки роторов. Формула изобретения Измерительное устройство .к балансировочному станку, содержащее генератор опорных сигналов, генератор модулирующего сигнала, датчик дисбал4нса, связанный с ним усилитель, три канала измерения проекций дисбаланса, каждый из выполнен в виде двух фазовых детекторов, блока измерения, модулятора и реле с переключающим контактом, подвижный контакт KOTODoro связан с входом блока измерения, а неподвижные соответ-. ственно размыкающий - с выходом первого фазового детектора, а замьисаЮ1дий - с выходом второго фазового детектора, входы модуляторов связаны с выходами генератора модулирующего сигнала, первые входы фазовых детекторов объединены с выходом усилителя, а вторые связаны с соответствующими выходами генератора опорных сигналов, отл.ичающеес я тем, что, с целью повышения точности балансировки, оно снабжено в каждом канале измерения амплитудным детектором и коммутирующей цепью, вход которой связан с выходом модулятора, а выход - со входом реле, второй и третий входы модулятора связаны с выходом первого фазового детектора и выходом амплитудного детектора, а вход последнего.соединен с выходом второго фазового детектора. Источники информации, принятые во внимание при экспертизе 1..Авторское свидетельство СССР № 524988, кл. G 01 М 1/20, 1974. 2. Авторское свидетельство СССР №658418, кл. G,01 М 1/22, 1977 (прототип).
xr
22-
хг
