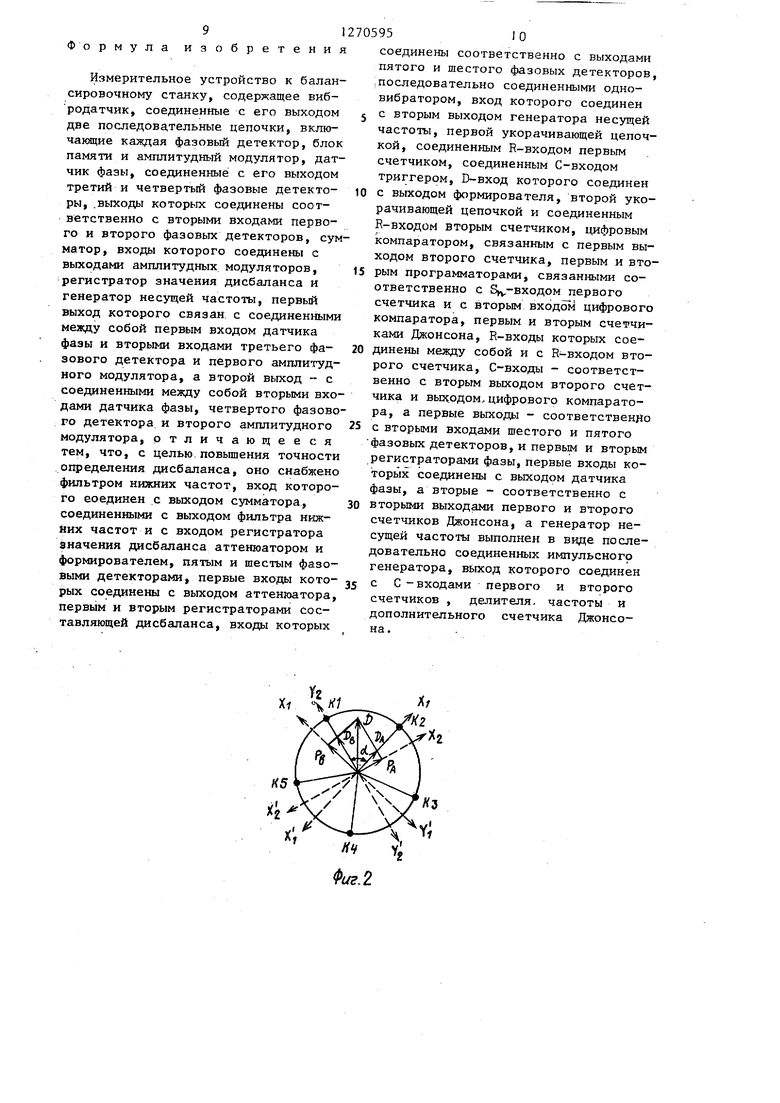
Изобретение относится к балансировочной технике и может быть использовано в балансировочных станках и автоматах при балансировке роторов в косоугольной системе координат, например крыльчаток венти.пяторов с числом осей, разрешенных для корректировки, более 3, Цель изобретения - повышение точности определения дисбаланса за счет автаматизации разложения вектора дисбаланса на составляющие. На фиг. 1 изображена структурная схема устройства; на фиг. 2 векторная диаграмма; на фиг. 3 - соатветствующая векторной диаграмме временная диаграмма, поясняющая принцип измерения составляющих дисбаланса; на фиг. 4 - временные диа;граммы поясняющие работу основных элементов устройства. Измерительное устройство к бапан сировочному станку содержит вибродатчик 1, схему 2 фильтрации сигнала дисбаланса, выполненную в виде двух последовательных цепочек, вклю чающих каждая фазовый детектор 3 (4 блок 5 (6j памяти и амплитудный мод лятор 7 (8), соединенный с выход,ами амплитуднБ1х модуляторов 7 и 8, сумма тор 9, фильтр 10 нижних, частот, вход которого соединен; с выходом сум матора 9, третий и четвертый фазовы детекторы II и 12, вьпсоды которых соединены соответственно с вторьПШ входами первого и второго фазовьк детекторов 3 и 4, соединенные с выходом фильтра Ю нижних частот регистратор 13 значения дисбаланса, аттенюатор 14 и формирователь 15, датчик 16 фазы, выход которого соединен с первыми входами третьего и четвертого фазовых детекторов 11 и 12, генератор 17 несущей частоты, выполненный в виде последовательно соединенных импульсного генератора 18, делителя 19 частоты и дополнительного счетчика 20 Джонсона, первый выход которого соединен с соеди ненными. мелду собой первым входом датчика I6 фазы и вторыми входами третьего фазового детектора 11 и пер вого амплитудного модулятора 7, а второй - с соединенными между собой вторыми входами датчика 16 фазы, четвертого фазового детектора 12 -и второго амплитудного модулятора В, последовательно соединенные одновиб ратор 21, вход которого соединен с вторым выходом дополнительного счетчика 20 Джонсона, укорачивающую цепочку 22, соединенный Н входом счетчик 23, триггер 24, D-вход которого соедин ен с выходом формирователя 15, вторую укорачивающую цепочку 25 и соединенный R-входом второй счетчик 26, С-вход которого соединен с С-входом первого счетчика 23 и выходом импульсного генератора 18, цифровой компаратор 27, связанный с первым выходом второго счетчика 26, первый и второй программаторы 28 и 29, связанные соответственно с 8ц-входом первого счетчика 23 и вторым входом цифрового компаратора 27, первый и второй счетчики 30 и 31 Джонсона, R-входы которых соединены между собой, и с R-входом второго счетчика 26, а С-входы - соответственно с вторым выходом второго счетчика 26 и выходом цифрового компаратора 27, пятый и шестой фазовые детекторы 32 и 33, первые входы которьпс соединены с выходом аттенюатора 14, а вторые входы - соответственно с первыми выходами второго 31 и первого 30 счетчиков Джонсона, первый и второй регистраторы 34 и 35 составляющих дисбаланса, связанные соответственно с выходами пятого и шестого фазовых детекторов 32 и 33 и первый и второй регистраторы 36 и 37 фазы, первые входы которых соединены с выходом датчика 16 фазы, а вторые - соответственно с вторыми выходами первого и второго счетчиков 30 и 31 Джонсона. Устройство работа€;т следующим образом. Измерение составляющих дисбаланса по осям на роторе, разрещенным для коррекции и образующр/м К Осевую с центральной симметрией систему координат, основано на фазовом детектировании отфильтрованного и перенесенного на несущую частоту tJ сигнала дисбаланса. На векторной диаграмме, привЪденной на фиг. 2, через D обозначен вектор дисбаланса, через D и Dg .составляющие дисбаланса в К-осевой системе координат (в качестве примера на фиг, 2 приведена 5-осевая система координат), образованной разрешенными для коррекции осяг-ш на роторе, а через Рд и Рц - проекции-вектора D на оси, перпендикулярные сос тавляющим БД и DI. Оси .на роторе, разрешенные для коррекции, обозначе ны на фиг, 2 символами К1, К 2, КЗ, К4, К5, а угол между ними - {Д,. Чере is г г М, 1 . 1 фиг. 2 обозначены оси вспомогательных прямоугольных систем координат, которым соответствуют формируемые в устройстве электрические сигналы несущей частоты liD, приведенные на фиг. 3 в виде временных диаграмм. Осям векторной диаграммы на фиг. 2 соответствуют положительные перепады импульсов на временных диаграммах на фиг. .3. Числа, стоящие у начала каждой и осей ординат временных диаграмм, приведенных на фиг. 3 и 4, указываю номер элемента структурной схемы, выходной сигнал которого приведен на соответствующей диаграмме. На восьмой сверху диаграмме фиг. 4 по оси ординат отсчитывается объем заполнения счетчика 26 в десятичном коде. Фильтрация сигнала дисбаланса, выделяющегося на выходе вибродатчика 1 при вращении балансируемого ро тора (не показан) с частотой и, осу ществляется схемой 2 фшьтрации сиг нала дисбаланса. ля этого.сигнал fс вибродатчика 1 поступает на входы первого и второго фазовых детекторов 3 и 4, к управляюпщм (вторым) входам которых прикладываются ортогональные сигналы частоты У, выраба тываемые фазовыми, детекторами 11 и 12. Эти сигналы, образующие измерительную прямоугольную систему координат, формируются в процессе перемножения в фазовых детекторах 11 и 12 выходного сигнала датчика 16 ф зы, частота которого равна ±5, и ортогональных сигналов несущей частоты О . Для обеспечения режима фазовращателя используемый в качестве датчика 16 фазы вращающийся трансформатор питается ортогональными (если в качестве датчика фазы используется сельсин, то трехфазными) сигналами, которые вырабатывает генератор 17 несущей частоты. Сдвиг 90° между выходными .сигналами генератора 17 несущей частоты обеспечивается включенным на его выходе 2-разрядным счетчиком 20 Джонсона, на счетный 595 . 4 вход которого поступают импульсы с делителя 19 частоты. Коэффициент преобразования делителя 19 частоты выбирается таким, чтобы (с учетом козффициента пересчета счетчика 20 Джонсона, равного 4) отношение частот выходных сигналов импульсного генератора 18 и генератора 17 несущей частоты имело значение, являющееся наименьшим общим кратным для числа осей К всех используемых систем координат, и обеспечивало необходимую дискретность для сдвига второй вспомогательной системы координат Х, 2 на угол (90°-а) с заданной точностью, при выполнении предлагаемого устройства это отношение равно 360, что позволяет измерять составляющие в системах координат с числом осей К, разрешенных для коррекции: 3, 4, 5, 6, 8, 9, 10, 12 и т.д. Постоянные напряжения U и Uy, пропорциональные проекциям вектора дисбаланса в прямоугольной измерительной системе координат, с выходов фазовых детекторов 3 и 4 поступают на входы блоков 5 и 6 памяти. После окончания измерения (через интервал времени, достаточньп для установления переходных процессов в фильтрах нижних частот, входящих в состав фазовых детекторов 3 и 4) блоки 5 и 6 памяти переключаются (по управляющим входам, не указаны) в рехим хранения и вращение балансируемого ротора прекращается. При этом на вьпходах блоков 5 и 6 паг-шти фиксируются -напряжения, соответствующие проекциям вектора дисбаланса в прямоугольной системе координат XY . Эти напряжения поступают на информационные (первые) входы амплитудных модуляторов 7 и 8, на-управляющие (вторые) входы которых приходят ортогональные импульсы с генератора 17 несущей частоты. На выходах модуляторов. 7 и 8 формируются сигналы, основные гармоники которых пропорциональны проекциям U и U.,. Векторная сумма этих сигналов с выхо да сумматора 9 поступает на фильтр 10 гармоники. Синусоидальный сигнал на выходе фильтра 10 нижних частот представляет собой аналог на несущей частоте О отфильтрованного от помех сигала дисбаланса. Амплитуда и фаза этого сигнала несут информацию о значении и фазе вектора дисбаланса. Регистратор 13 значения дисбаланса пре назначен для индикации значения дисб ланса и преобразования значения дисбаланса в дискретную форму при автоматизации процесса балансировки. Из векторной диаграммы5 приведенной на фиг. 2, видно, что для опреде ления составляющих БД и Dg, вектора дисбаланса необходимо измерить его проекции Рд и РЬ на вспомогательные оси, перпендикулярные составляющим В и Dg , Проекции Рд и Pg связаны с сос тавляющими D и D выражениями: e-iin5-P в пятиосевой системе координат, например 72 , а-г-- 1,051. Для получения составляющих D и IL преобразованный на несущую частоту сигнал дисбаланса через аттенюатор 1 с учетом коэффициента . поступае на информационные (первые) вход фазовых детекторов 32 и 33. На их уп-равляющие (вторые) входы подаются прямоугольные импульсы, фаза которых обеспечивает формирование выход№1х напряжений, пропорциональных проекциям Р и PJ и, соответственно, составляющим БД и D вектора дисбаланса Опорные сигналы Xj и Xj (диагра1 1мы 31/1 и 30/4 на фиг. 3) приведены для случая, когда в качестве фазовых детекторов 32 и 33 используется устрой ство выборки и хранения. При этом фа зы их положительных перепадов (им соответствуют моменты выборки сигнала) на временных диаграммах соответствует осям )г и X векторной диаграммы на фиг. 2.( использовании в качестве фазовых детекторов 32 и 33 синхронных ключевых детекторов фаза опорных сигналов должна быть смещена на 90°С). Постоянные напряжения, пропорциональньте составляющим БД и Б вектора /дисбаланса, с выходов фазовых детек торов 32 и 33 поступают на регистра. торы 34 и 35 составляющих дисбаланса для индикации и преобразования в дискретную форму при автоматизаи,ии процесса балансировки. Дпя отыскания составляющих Dp, и Б на балансируемом роторе на первые входы регистраторов 36 и 37 фазы поступает сигнал углового положения с выхода датчика 16 фазы, представяющий собой синусоидальный сигнал есущей частоты. На вторые входы реистраторов 36 и 37 фазы подаются порные сигналы X и У , фаза положиельных перепадов которых соответстует составляющим D и Dp. Поиск составляющих Б и Б на роторе производится путем поворота баансируемого ротора (жестко связаного с датчиком 16 фазы) до совпадеия фаз сигналов на входах регистраторов 36 и 37 фазы (поочередно). Рассмотрим процесс формирования опорных сигналов , 2. 2 X Для привязки текущего вектора к осям на балансируемом роторе, разрешенным для коррекции, счетчик 23 фор- , мирует сигнал КцЭ (см. диаграмму 19 на фиг, 4), являющийся электрическим аналогом этих осей (фиг. 2, оси К1-К5). Сигнал KU)представляет собой прямоугольные импульсы, число которых за период несущей частоты и) равно числу осей К , Формирование импульсов осуществляется путем пере- счета счетчиком 23 выходных импульсов импульсного генератора 18, Коэффициент п пересчета счетчика 23 задается по В(-входу (входу предварительной установки счетчика в состояние, соответствующее числу п) программатором 28 и выбирается равным при числе осейК 5, коэффициент . Угловое положение сигнала KOL) в : системе координат, образуемой ортогональными сигналами несущей частотыи), задается путем синхронизации по R-входу счетчика 23 импульсами, формируемыми укорачивающей цепочкой 22 из. отрицательных перепадов выходного сигнапа одновибратора 21. Длительность выходных импульсов одновибратора 21 задает угол сдвига сиг HanaKtO относительно одной из осей этой систем1м координат (например, на выходе О генератора 17 несущей частоты) и определяется расчетным путем или при наладке. Определение двух из К осей, на которых лежат составляющие БД и Б, дисбаланса (К и К на фиг. 2), начинается с того, что выявляется одна из них, расположенная справа (по часовой стрелке) от вектора дис баланса, Осуществляет эту операцию риггер 24, на С-вход которого посупает сигнал ku), а на D-вход - выодные импульсы формирователя 15. оложительные перепады этих импульов соответствуют угловому положению ектора дисбаланса.
Для упрощения конструкции формирователь 15, состоящий, например, из фазовращателя на 90° и нуль-компаратора, может быть выполнен без фазовращателя на 90°, при этом перепады его выходных импульсов оказываются смещенными на 90° относительго угла дисбаланса, что учитывается при настройке путем поворота на такой же угол сигналами). Положительные перепады импульсов, вьщеляющихся на выходе триггера 24, соответствуют оси . Укорачивающая цепочка 25 преобразует эти перепады в короткие импульсы, служащие для синхронизации второго счетчика 26 и второго и третьего двухразрядных счетчиков 30 и 31 Джонсона, которые обеспечивают формирование первой вспомогательной прямоугольной системы координат ,, ось Х которой совпадает с составляющей БД и второй - ось Y которой совпадает с составляющей D (на фиг. 2 эти составляющие расположены на осях на роторе, разрешенных для коррекций, К2 и К1). Для их формирования на счетный вход счетчика 26 поступают импульсы с импульсного генератора 18. Коэффициент пересчета счетчика 26 выбирается равным коэффициенту делителя 19 частоты, который в. рассматриваемом примере выполнена устройства имеет значение 90. На втором выходе счетчика 26 при его заполнении (на 90-м счетном импуль- . се) вырабатываются положительные le-репады, осуществляющие тактирование счетчика 30 Джонсона четыре раза за период частоты . В результате на каждом из четырех выходов счетчика 30 Джонсона -формируются прямоугольные импульсы типа меандр частотыи), фаза которых соответствует, осям , (см« фиг. 2). Цифровой компаратор 27 осуществляет сравнение текущего состояния счетчика 26 с кодом, заданным программатором 29. В моменты равенства кодов (4 раза за период .частоты иЗ) на выходе цифрового, компататора 27 формируются положительные перепады, которые осуществляют тактирование счётчика 31 Джонсона с задержкой на угол 90°-Ы, заданный программатором 29. В результате на каждом из четырех выходов счетчика 31 Джонсона вырабатываются
сигналы вспомогательной системы координат Хз Y2 Выходные сигналы Х.2 и Y, счетчиков 30 и 31 . Джонсона используются в качестве опорных для фазовых детекторов 32 и 33,
которые вырабатывают постоянные напряжения , пропорциональные составляющим DJ и Dg . Сигналы и У используются дпя отыскания составляющих Вд х на балансируемом роторе.
5
Таким образом, балансировка ротора с использованием данного устройства осуществляется в следующей последовательности: включают измерительное вращение, через необходимый
0 интервал времени (5-10 с) вращение выключается и устройство переводится в режим хранения информации, при этом регистратор 13 значения дисбаланса позволяет оценить необходи5мость корректировки дисбаланса (сравнивая значения дисбаланса с допустимой для данного ротора величиной),а регистраторы 34 и 35 составляющих дисбаланса позволяют определить ве0личину корректирующей массы, которую нужно устранить или внести (в зависимости от выбранного метода коррекции) по каждой из двух составляющих дисбаланса на осях, разрешенных для
5 коррекции. Вращая ротор (вручную или автоматически), отыскивают эти оси (оси коррекции) на роторе, контролируя их регистраторами 36 и 37 фазы.
0
Измерительное устройство к балансировочному станку обеспечивает повьшение точности балансировки роторов с ограниченным числом-осей, раз-
5 рещенных для коррекции, за счет автоматического разложения вектора дисбаланса на составлякщие без участия оператора.
Кроме того, обеспечивается воз0можность оперативной перестройки устройства путем переключения программаторов и установки необходимого коэффициента передачи аттенюатора при изменении чиста осей на роторе,
5 разрешенных для коррекции, что приводит к увеличению производительности и расширению технологической возможности устройства Формула изобретения Измерительное устройство к балансировочному станку, содержащее вибродатчик, соединенные с его выходом две последовательные цепочки, включакяцие каждая фазовый детектор, блок памяти и амплитудный модулятор, датчик фазы, соединенные с его выходом третий и четвертый фазовые детекторы, .выходы которых соединены соответственно с вторыми входами первого и второго фазовых детекторов, сум матор, входы которого соединены с выходами амплитудных модуляторов, регистратор значения дисбаланса и генератор несущей частоты, первый выход которого связан с соединенными между собой первым входом датчика фазы и вторыми входами третьего фазового детектора и первого амплитудного модулятора, а второй выход - с соединенными между собой вторыми входами датчика фазы, четвертого фазово го детектора, и второго амплитудного модулятора, отличающееся тем, что, с целью.повьппения точности определения дисбаланса, оно снабжено фильтром нижних частот, вход которого еоединен с выходом сумматора, соединенными с выходом фильтра нютних частот и с входом регистратора значения дисбаланса аттенюатором и формирователем, пятым и шестым фазовыми детекторами, первые входы которых соединены с выходом аттенюатора, первым и вторым регистраторами составляющей дисбаланса, входы которых соединены соответственно с выходами пятого и шестого фазовых детекторов, последовательно соединенными одновибратором, вход которого соединен с вторым выходом генератора несущей частоты, первой укорачивающей цепочкой, соединенным R-входом первым счетчиком, соединенным С-входом триггером, D-вход которого соединен с выходом формирователя, второй укорачивающей цепочкой и соединенным R-входом вторым счетчиком, цифровым компаратором, связанным с первым выходом второго счетчика, первым и вторым программаторами, связанными соответственно с Е,-входом первого счетчика и с вторым входом цифрового компаратора, первым и вторым счетчиками Джонсона, Н-входы которых соединены между собой и с R-входом второго счетчика, С-входы - соответственно с вторым выходом второго счетчика и вьщодом,цифрового компаратора, а первые выходы - соответственно с вторыми входами шестого и пятого фазовых детекторов, и первьш и вторым регистраторами фазы, первые входы которых соединены с выходом датчика фазы, а вторые - соответственно с вторыми выходами первого и второго счетчиков Джонсона, а генератор несущей частоты выполнен в виде последовательно соединенных импульсного генератора, вьпсод которого соединен с С -входами первого и второго делителя, частоты и счетчиков счетчика Джонсо- дополнительного на.

| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1420418A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Измерительное устройство к балансировочному станку | 1986 |
|
SU1326927A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1490518A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1226086A1 |
| Измерительное устройство к балансировочному станку | 1986 |
|
SU1320673A1 |
| Измерительное устройство к балансировочному станку | 1989 |
|
SU1649328A1 |

Изобретение относится к балансировочной технике. Целью изобретения является повышение точности определения дисбаланса за счет автоматизации разложения вектора дисбалан-са на составляющие. Сигнал с вибродатчика 1 фильтруется в схеме 2 фильтрации и поступает на вход регистратора 13 значения дисбаланса, который устанавливает необходимость коррекции, и через аттенюатор 14 и фазовые детекторы 32 и 33 поступает в регистраторь 34 и 35 составляющих дисбаланса, определяющих величину корректирующей массы на осях, разрешенных для коррекции,,В качестве опорных сигналов для фазовых дешифраторов 32 и 33 используются выходные о сигналы счетчиков 31 и 30 Джонсона, (О 1(Л положение осей коррекции при балансировке контролируется регистраторами 36 и 37 фазы, 4 ил. tc vj ел (. ел
X/
| Измерительное устройство к балансировочному станку | 1980 |
|
SU917016A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измерительное устройство к балансировочному станку | 1981 |
|
SU1010485A1 |
