11
Изобретение относится к балансировочной технике и может быть использовано в балансировочных станках- автоматах и автоматических линиях.
Цель изобретения - nosbrnjeHHS про- изводительности балансировки за счет уменьшения усредненного значения времени позиционирования, достигаемого путем ocyп ecтвлeния позиционирования по кратчайшему пути.
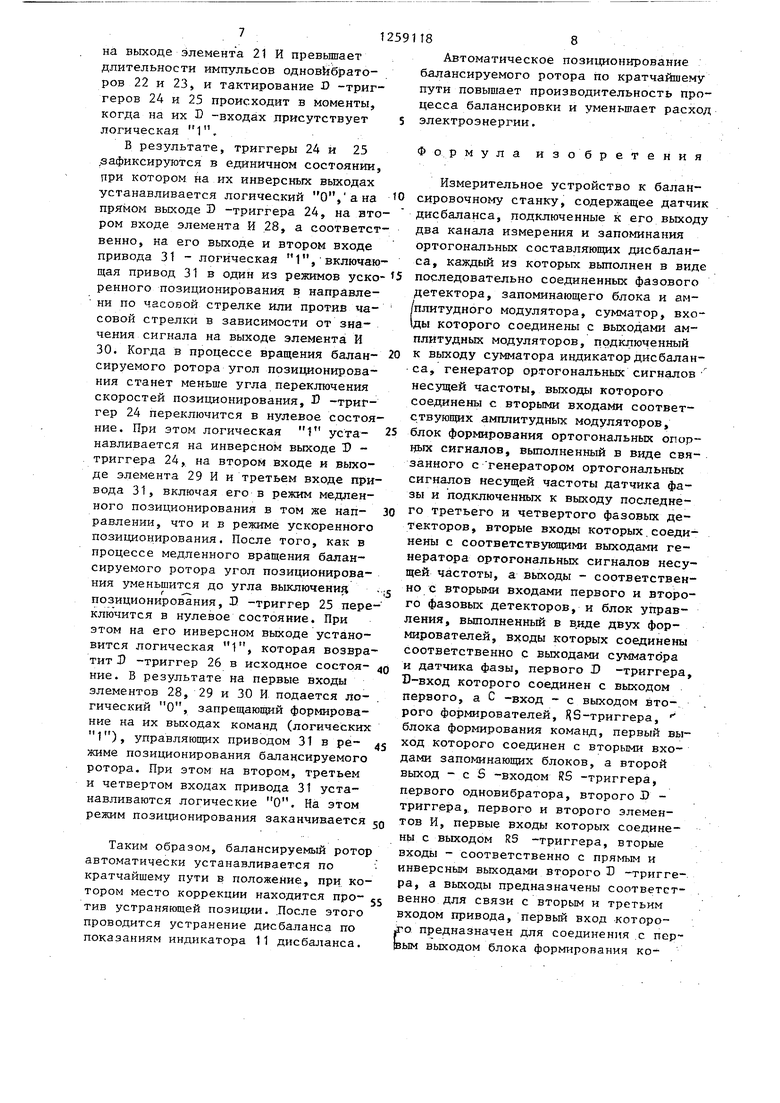
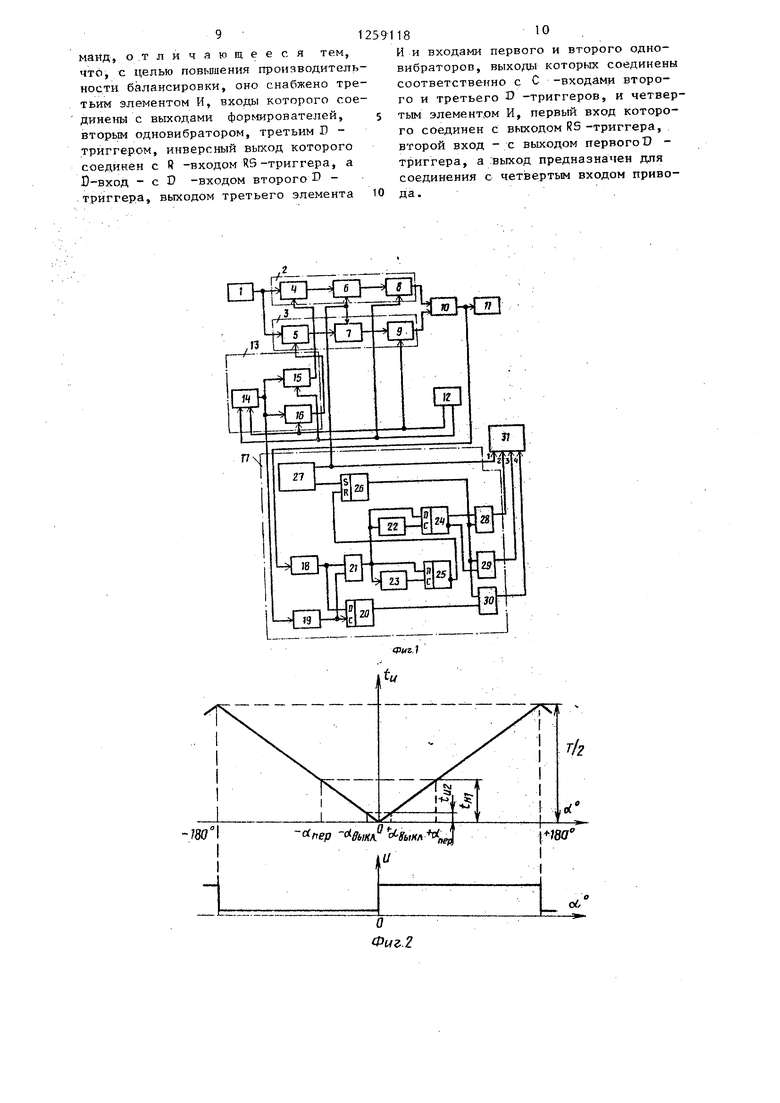
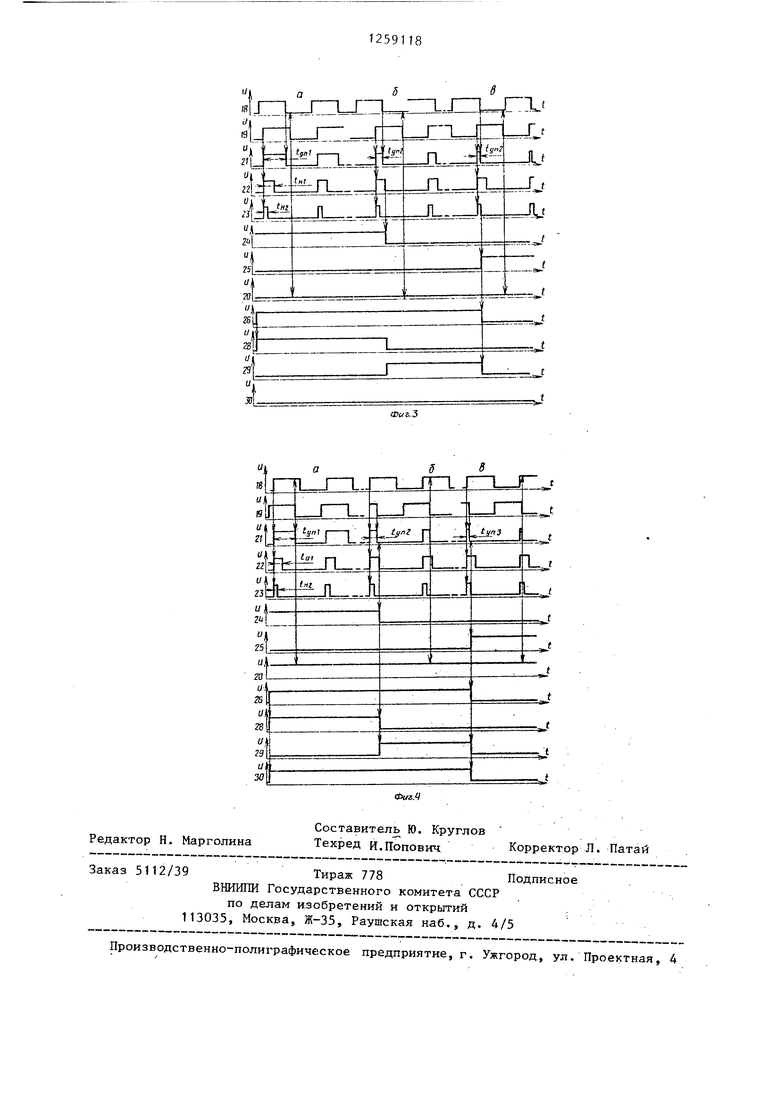
На фиг. 1 приведена структурная схема измерительного устройства к балансировочному станку; на фиг. 2 - зависимости длительности импульсов на выходе фазоимпульсного детектора и логического уровня сигнала на выходе детектора знака от угла позиционирования; на фиг. 3 и 4 - временные диаграммы работы элементов измерительного устройства при отрицатель- ном и положительном углах позиционирования соответственно.
Измерительное устройство к балансировочному станку содержит датчик 1 дисбаланса, подключенные к его выходу два канала 2 и 3 измерения и запоминания ортогональных составляющих дисбаланса, каждый из которых выполнен 13 виде последовательно соединенных фазового детектора 4 (5), запоминающего блока 6 (7), и амплитудного модулятора 8 (9), сумматор 10, входы которого соединены с выходами амплитудных модуляторов 8 и 9, индикатор 11 дисбаланса, вход кото- рого соединен с выходом сумматора 10 генератор 12 ортогональных сигналов несущей частоты, подключенный к вторы входам амплитудных модуляторов 8 и 9 блок 13 формирования ортогональных опорных- сигналов, выполненный в виде связанного входами с генератором ортогокальных сигналов датчика 14 фазы и подключенных к выходу последнего третьего и четвертого фазовых детек- торов 15 и 16, вторые входы которых соединены выходами генератора 12 ортогональных сигналов несущей частоты а выходы - соответственно с вторыми входами фазовых детекторов 4 и 5, и блок 17 управления, выполненный в виде двух формирователей 18 и 19, вход первого из которых соединен с выходо сумматора 10, а вход второго - С выходом датчика 14 фазы, первого 5 - триггера 20, элемента 21 И, входы которого соединены с выходами формирователей 18 и 19, двух одиовибраторрв
s 0 5
0
18
2.2 и 23, второго и третьет о D -триггеров 24и 25, D -входы которых связаны соответственно с выходами од- новибраторов 22 и 23 и выходом элемента И 21, а С-входы - соответственно с вьгходами одновибраторов 22 и 23, R5-тpиггepa 26, R -вход которого соединен с инверсным выходом третьего D-триггера 25, блока 27 формирования команд, первый вход которого соединен с запоминающими блоками 6 и 7, а второй соединен с 5 -входом RS-Tpnrrepa 26, и элементов 28 - 30 И, первые входы которых подключены к выходу КЗ-триггера 26, вторые входы - соответственно к прямому и инверсному выходам второго D -триггера 24 и выходу первого D -триггера 20, а выходы предназначены для соединения с вторым, третьим и четвертым входами привода 31, первый вход которого предназначен для подключения к первому выходу блока 27 формирования команд.
Измерительное устройство работает в двух основных режимах: измерение параметров дисбаланса, позиционирование балансируемого ротора в положение, при котйром место коррекции на- (ходится против устраняющей позиции.
На фиг. 2 обозначение об соответствует углу позиционирования, за кото- рьй принимается угол между текущим значением углового положения балансируемого ротора и его положением, при котором место коррекции находится против устраняющей позиции, в направлении кратчайшего пути позиционирования (по часовой или против часовой стрелки). Угол пози шонирования принимается положительным, если отсчитывается в направлении против часовой стрелки, и отрицательным при отсчете по часовой стрелке. Обозначения , w(H указывают углы позиционирования, при кото рых производится соответственно переключение скоростей пози- и юнирования и вьжлючение позиционирования. Величина угла переключения скоростей позиционирования выбирается при настройке станка так, чтобы к
моменту уменьшения угла позиционирования до угла выключения позиционирования закончился переход от скорости ускоренного к скорости медленного позиционирования . Величина угла выключения позиционирования выбирается исходя из требуемой точности определения угла коррекции на балансируемом
роторе. Обозначения t,
-U2
зывают длительность импульсов на выходах первого и второго одновибрато- ров 22 и 23, которые соответствуют
с пер. и Di выкл.
На временных диаграммах (фиг.З и 4) работы элементов измерительного устройства представлены сигналы на выходах элементов, номера которых обозначены слева от осей ординат и соответствуют номерам элементов на фиг. Т Уровню логической 1 соответствует высокий уровень напряжения уровню логического О - низкий. . Обозначения ti, , t,.n , ty,, указывают длительность импульсов, на выходе элемента И 21 для случаев когда угол позиционирования имеет величину (фиг. 3 и 4) :
большую, чем угол переключения скоростей позидаонирования , ;
меньшую, чем угол переключения скоростей позиционирования, но большую чем угол выключения позиционирования tyni ;
меньшую, чем угол выключения позиционирования tyq .
Привод 31 вращения балансируемого ротора может работать в одном из пяти режимов: измерительное вращение, ускоренное позиционирован ие в напр ав лении по часовой стрелке, ускоренное позиционирование в направлении против часовой стрелки, медленное позиционирование в направлении по часово стрелке и медленное позиционирование против часовой стрелки. Выбор режим (работы привода 31 производится по командам, подаваемым на его входы.
Для включения режима измерительного вращения необходимо подать логическую 1 на первый вход привода 31 .
Для включения режима ускоренного позиционирования в направлении по часовой стрелке необходимо подать логическую 1 на второй вход привода 31.
Для включения режима медленного 50 позиционирования в направлении по часовой стрелке необходимо подать логическую 1 на третий вход привода 31.
Для включения режимов ускоренного и медленного позиционирования в про- 55 тивоположную сторону необходимо подать логическую 1 и на четвертый вход привода 31.
10
t5
20
25
,
,
50 .
55
2591184;
При выключении команд, подаваемых на первый, второй и третий входы привода 31, он переводится в режим т.ор- моженйч.
Измерение параметров дисбаланса на:чинается с формирования на первом выходе блока 27 фop mpoвaния команд логической 1, включакяцей привод 31 в режим измерительного вращения, а запоминаюЕцие блоки 6 и 7 в режим записи информации. С выхода датчика 1 электрический сигнал, пропорциональный дисбалансу балансируемого ротора, поступает на информационные входы фазовых детекторов 4 и 5 на управляющие входы которых подаются два орто- гональньк опорных сигнала с частотой вращения балансируемого ротора. Опорные сигналы формируются на выходах фазовых детекторов 15 и 16 блока 13 формирования ортогональных опорных сигналов. Для этого сигнал с выхода датчика 14 фазы поступает на вторые входы фазовых детекторов 15 и 16, на первые входы которых подаются ортогональные сигналы несущей частоты с генератора 12. Датчик 14 фазы (например, вращающийся трансформатор в режиме фазовращателя) питается сигналами генератора 12. Постоянные напряжения, пропорциональные, проекциям вектора дисбаланса, с выходов фазовых детекторов 4 и 5 поступают через запоминающие блоки 6 и 7 на информационные входы амплитудных модуляторов 8 и 9, на управляющие входы которых
О
подаются ортогональные сигналы несущей частоты с генератора 12. На выходах амплитудных модуляторов 8 и 9 первого и второго каналов 2 и 3 измерения и запоминания ортогональных составляющих вырабатываются два ортогональных сигнала несущей частоты, амплитуда которых пропорциональна постоянным напряжением, вырабатьшае- мым соответственно фазовыгда детекторами 4 и 5. Выходные сигналы ампли- .ТУДНЫХ модуляторов 8 и 9 поступают. на входы сумматора 10, на выходе которого выделяется синусоидальный сигнал несущей частоты, являюпр 1йся аналогом вектора дисбаланс:а в полярной системе координат. С выхода сумматора 10 сигнал поступает на вход индикатора
11 дисбаланса, показания которого на этапе измерения испо.пьзук тгя 1шя выбора необходимого масгатлпа измерения значения дисбаланса.
30
40
45
,51
. Пос-пе окончания переходных процес - сов в фазовых детекторах А и 5 блок 27 формирования команд вьграбатывает на первом выходе логический О. Привод 31 из режима измерительного вра- щения переводится в режим торможения а запоминающие блоки 6 и 7 переключаются в режим хранения информации. При этом синусоидальные сигналы ортогональных составляющих на выходах ка- налов 2 и 3, а соответственно, и синусоидальный сигнал на выходе сумматора 10, определяются постоянными напряжениями запоминающими блоками 6 и 7. Амплитуда и фаза сигнала на выходе сумматора 10 соответствует значению и углу измерения дисбаланса На этом этап измерения заканчивается Этап позиционирования балансируемого ротора в положение коррекции на- чинается после полной остановки вращения ротора. При этом на втором выходе блока 27 формирования команд Бьфабатьюается импульс, устанавливающий R5 -триггер 26 по S -входу в единичное состояние. При этом на первых входах элементов 28-30 И, устанавливается уровень логической 1, разрешающий формирование на их выходах команд, включающих привод 31 в один из четырех реткимов позиционирования: ускоренное позиционирование по часовой стрелке, ускорениое позиционирование против часовой стрелки, медленное позиционирование по часо- вой стрелке, медленное позиционирование против часовой стрелки. Скорость позиционирования определяется величиной угла позиционирования, а направление пози1шонирование - его зна- ком.
Величина и знак угла позиционирования определяются путем сравнения фаз двух синусоидальных сигналов: аналога дисбаланса на несущей часто- те и сигнала углового положения ротора. Для этого сигнал с выхода сумматора 10 поступает на формирователь 18, а с выхода датчика 14 фазы на формирователь 19. Каждый из формиро- вателей 18 и 19 вьфабатывает прямоугольные импульсы типа меандр.несущей частоты, причем формирователь 18 вырабатывет импульсы, совпадающие по фазе с входным сигналом, а форми- рователь 19 - в протииофазе. Для оп- редс ления знака угла позиционирования а, соответствепно, и направления
1186
позиционирования, импульсы с выхода формирователя 18 поступают на)-вход и -триггера 20, выполняющего функцию детектора знака, В -триггер 20 тактируется отрицатепьными фронтами выходных импульсов формироватепя Т9. При отрицательном угле позиционирования тактирование Р-триггера 20 производится в моменты, когда на eroD- входе присутствует логический О, поэтому на выходе D -триггера 20, а соответственно, на выходе элемента 30 И и четвертом входе привода 31 также устанавливается логический О который задает направление вращения привода 31 балансируемого ротора, пр позиционировании, по часовой стрелке При положительном угле позиционирования тактирование D -триггера 20 производится в моменты, когда на его Р-входе присутствует логическая 1, поэтому на выходах D -триггера 20, элемента И 30 и четвертом входе привода 31 устанавливается логическая 1, которая задает направление вращения привода 31 балансируемого ротора, при позиционировании, против часовой стрелки.
Для измерения величинь угла позиционирования выходные сигналы формирователей 18 и 19 подаются, соответственно, на первый и второ1й в хо ды элемента И 21, вьшолняющего функцию фазоимпульсного детектора. На выходе элемента И 21 вырабатываются прямоугольные импульсы несущей частоты, длительность 1ц которых пропорциональна углу позиционирования (фиг. 3). Эти импульсы подаются на входы одновибраторов 22 и 23 и на D-входы D -триггеров 24 и 25, которые тактируются отрицательными фронтами импульсов, генерируемых соответствующими одновибраторами 22 и 23. Запуск одновибраторов 22 и 23 производится положительными фронтами (фиг. 4 и 5) входных импульсов. Длительности t t( импульсов, генерируемых одновибраторами 22и 23, выбираются в соответствии с выражениями:.
360
т f
-u-i
ВЫКл
360
Т,
где Т. - период несущей частоты.
Если угол позиционирования больше угла переключения скорости позициони- .рования, то длительность импульсов
на выходе элемента 21 И превьшает длительности импульсов одновйбрато- ров 22 и 23, и тактирование D -триггеров 24 и 25 происходит в моменты, когда на их D -входах присутствует логическая 1,
В результате, триггеры 24 и 25 .зафиксируются в единичном состоянии, при котором на их инверсных выходах
Автоматическое позиционирование балансируемого ротора по кратчайшему пути повышает производительность процесса балансировки и уменьшает расход электроэнергии.
Ф о рмула изобретения
устанавливается логический О, а на прямом выходе В -триггера 24, на втором входе элемента И 28, а соответственно, на его выходе и втором входе привода 31 - логическая 1, включаюГО
Измерительное устройство к балансировочному станку, содержащее датчик дисбаланса, подключенные к его выходу два канала измерения и запоминания ортогональных составляющих дисбаланса, каждый из которых выполнен в виде щая привод 31 в один из режимов уско- 5 последовательно соединенных фазового ренного позиционирования в направле- детектора, запоминающего блока и ам- ни по часовой стрелке или против ча- /плитудного модулятора, сумматор, вхощы которого соединены с выходами амплитудных модуляторов, подключенный 20 к выходу сумматора индикатор дисбалансовой стрелки в зависимости от значения сигнала на выходе элемента И 30. Когда в процессе вращения балансируемого ротора угол позиционирования станет меньше угла переключения скоростей позиционирования, D -триггер 24 переключится в нулевое состояса, генератор ортогональных сигналов несущей частоты, выходы которого соединены с вторыми входами соответствующих амплитудных модуляторов.
ние. При этом логическая 1 уста- 25 блок формирования ортогональных опорных сигналов, выполненный в виде свя- ванного с генератором ортогональных сигналов несущей частоты датчика фазы и подключенных к выходу последнего третьего и четвертого фазовых детекторов, вторые входы которых.соединены с соответствующими выходами генератора ортогональных сигналов несущей частоты, а выходы - соответственно с вторыми входами первого и второго фазовых детекторов, и блок управления, выполненный в в.иде двух формирователей, входы которых соединены соответственно с выходами сумматора и датчика фазы, первого D -триггера, D-вход которого соединен с выходом первого, а С -вход - с выходом второго формирователей, ЧS-триггера, блока формирования команд, первый вынавливается на инверсном выходе - триггера 24, на втором входе и выходе элемента 29 Н и третьем входе привода 31, включая его в режим медленного позиционирования в том же нап- 30 равлении, что и в режиме ускоренного позиционирования. После того, как в процессе медленного вращения балансируемого ротора угол позиционирования уменьшится до угла выключение ...с f -- 1J
позиционирования, -D -триггер 25 пере- ключится в нулевое состояние. При этом на его инверсном выходе установится логическая 1, которая возвратит D -триггер 26 в исходное состоя- о ние. В результате на первые входы элементов 28, 29 и 30 И подается логический О, запрещающий формирование на их выходах команд (логических
1), управляющих приводом 31 в ре- 5 ° которого соединен с вторыми входами запоминающих блоков, а второй выход - с S -входом RS -триггера, первого одновибратора, второго D - триггера, первого и второго элеменжиме позиционирования балансируемого ротора. При этом на втором, третьем и четвертом входах привода 31 устанавливаются логические О. На этом режим позиционирования заканчивается 50 И, первые входы которых соединены с выходом КЗ -триггера, вторые Таким образом, балансируемый ротор автоматически устанавливается по кратчайшему пути в положение, при ковходы - соответственно с прямым и инверсным выходами второго Г -триггера, а выходы предназначены соответсттором место коррекции находится про- jj венно для связи с вторым и третьим
тив устраняющей позиции. .После этого проводится устранение дисбаланса по показаниям индикатора 11 дисбаланса.
входом привода, первый вход которого предназначен для соединения .с пс рзым выходом блока формирования ко12591188
Автоматическое позиционирование балансируемого ротора по кратчайшему пути повышает производительность процесса балансировки и уменьшает расход электроэнергии.
Ф о рмула изобретения
ГО
5
са, генератор ортогональных сигналов несущей частоты, выходы которого соединены с вторыми входами соответствующих амплитудных модуляторов.
дами запоминающих блоков, а второй выход - с S -входом RS -триггера, первого одновибратора, второго D - триггера, первого и второго элемен И, первые входы которых соединены с выходом КЗ -триггера, вторые
И, первые входы которых соединены с выходом КЗ -триггера, вторые
входы - соответственно с прямым и инверсным выходами второго Г -триггера, а выходы предназначены соответствходом привода, первый вход которого предназначен для соединения .с пср рзым выходом блока формирования коу1259
манд, о.тличающееся тем, что, с целью повьпяения производительности балансировки, оно снабжено третьим элементом И, входы которого соединены с выходами формирователей, j вторым одновибратором, третьим D - триггером, инверсный выход которого соединен с R -входом RS-триггера, а D-вход - с D -входом второго D - триггера, выходом третьего элемента Ю
1810 ,
И и входами первого и второго одно- вибраторов, выходы которых соединены соответственно с С -входами второго и третьего О -триггеров, и четвертым элементом И, первый вход которого соединен с; выходом RS -триггера, второй вход - с вьисодом первого) - триггера, а .выход предназначен для соединения с чет вертым входом привода..
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1095042A2 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Измерительное устройство к балансировочному станку | 1986 |
|
SU1326927A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1490518A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1420418A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1270595A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1226086A1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
Изобретение относится к балансировочной технике и может быть использовано в балансировочных станках-автоматах и автоматических лншсях. Цель изобретения - повышение производительности балансировки за счет уменьшения усредненного значения времени позиционирования, достигаемое за счет выбора направления вращения, обеспечивающегб минимальный проворот ротора. Определение знака угла позиционирования происходит с помощью связанного с форм1фователями D -триггера, который выполняет функцию детектора знака. Сигнал с выхода D - триггера поступает на первый вход элемента И, второй вход которого связан с выходом ИЗ -триггера, а выход предназначен для соединения с четвертым входом привода. Логическая 1 или логический О на этом входе обеспечивают позиционирование соответственно против хода или по ходу часовой стрелки. Сигналы на первых трех входах привода обеспечивают рабочее вращение, быстрое и медленное позиционирование. 4 ил. (Л С. 1«Ч УН :О
г/2
-т
1
(пер -(
и
180
о
Фнг.2
U
Г1.
| Измерительное устройство к балансировочному станку | 1981 |
|
SU1010485A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1095042A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
